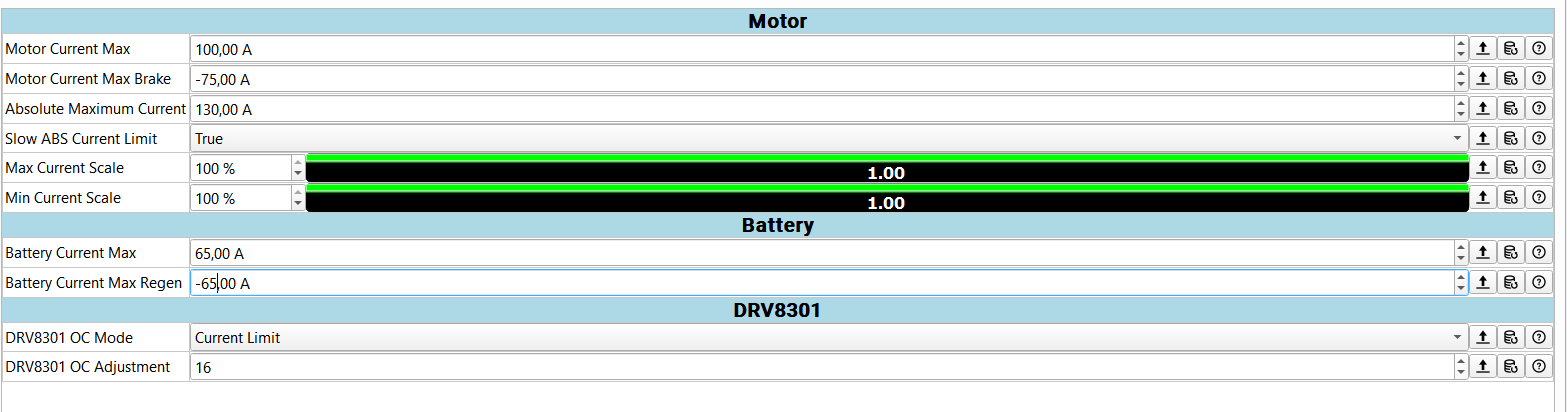
Changed some settings for today tests
Little higher temp of the mosfets
Safer / reasonable power limits.
I tried on the most forward position on the mast/board and the front wing position, not middle.
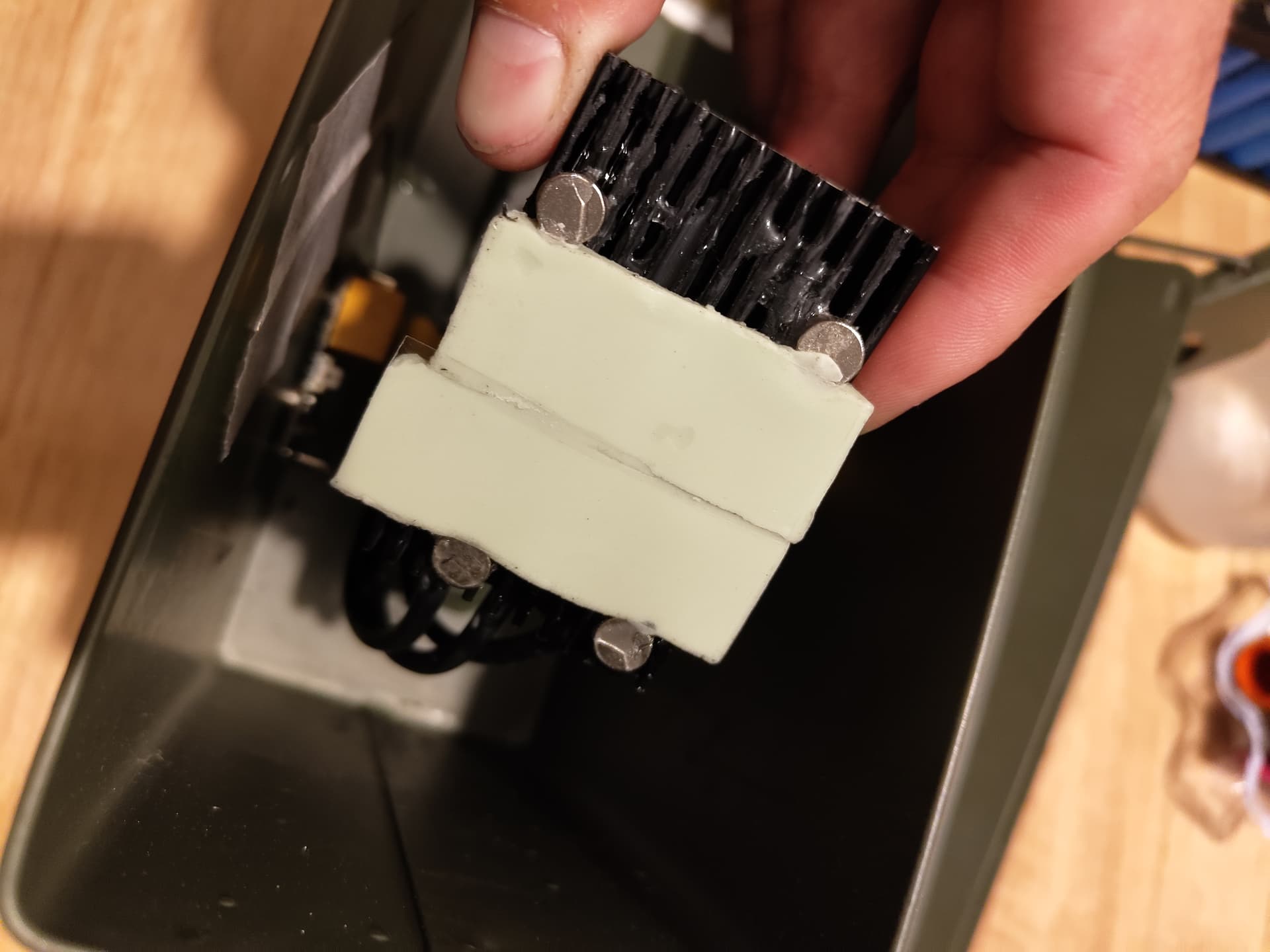
I managed to get on foil when kneeled on the board, by pumping it. The vesc thermal throttling comes top early, I need to make a new and and better heatsink. Still a half succes
Did not manage to get on foil when standing, even when all the way forward.
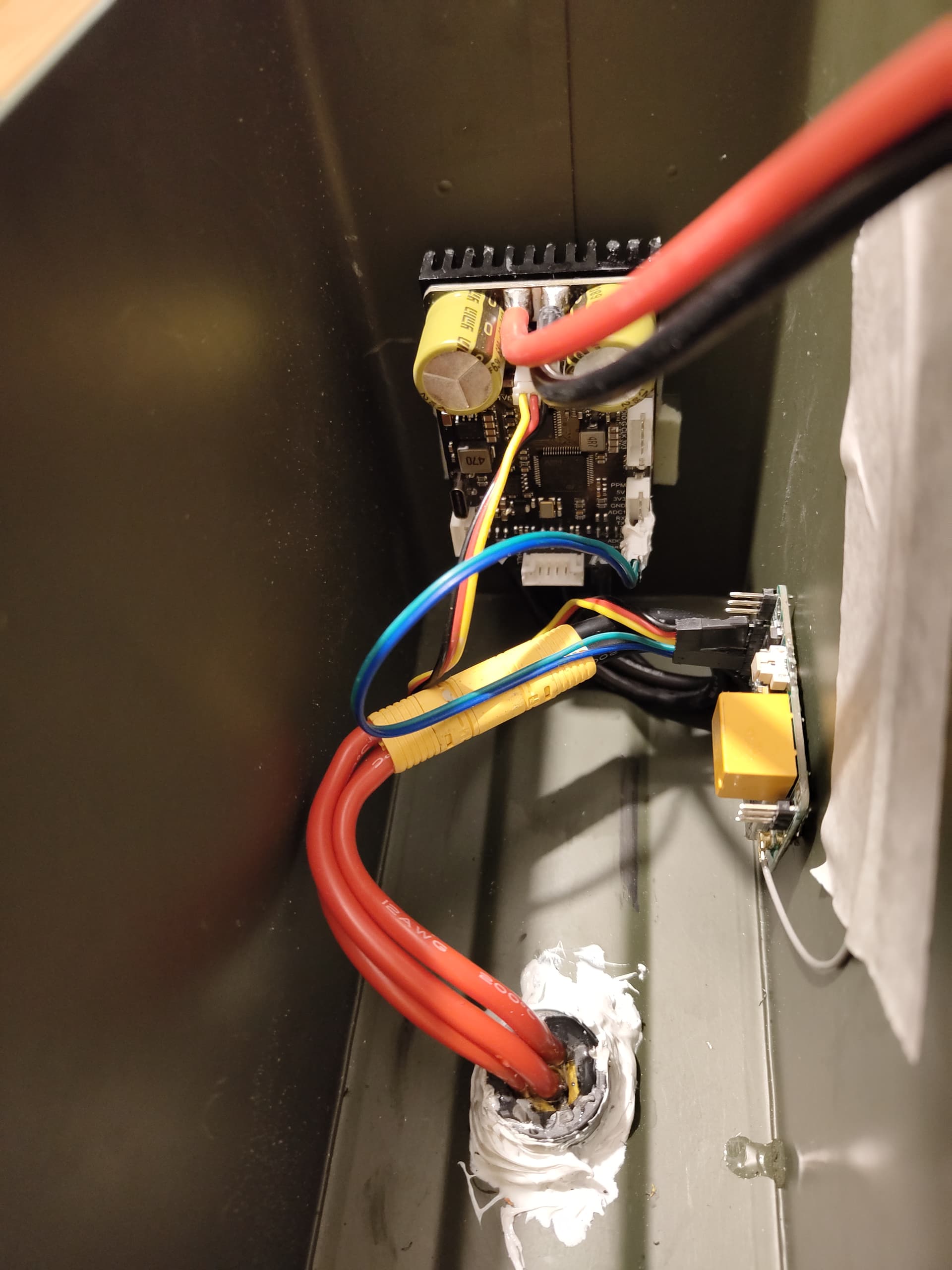
The waterproof connector also bit the bullet as expected, actually the ground connection was smaller than L and N, did not see that. Motor was starting in either direction due to the phase disconnected
I will try to redo this connexion with MR60 connector in epoxy.
With the overheated connector, water was coming thru the connector body, apparently no damage to electronics.
Thermal pad for the controller to dissipate to the case
Mt60 connector pass-trough, cast in epoxy.
It is an extra failure point, but at least I would be able to remove the controller from the box! The controller is mounted by 4 strong magnets to the box.
What do you think about the wires mast mount, last test I taped the wires but it is not efficient and takes a long Time.
There are builds where they are in a printed Channel, or thru the mast. I will look at a spare mast in the future to run the wires inside and reduce drag.
Third session went well.
Some hiccups with the remote connection, printed mast mount failing, and my Friend fingers into the michhobby prop that exploded.
Other than that, we managed to run the battery down and get some good runs foiling feet on the board.
I got the start technique dialled and I feel like I Can start on foil with much lower power now.
Hello from south of France !
I am just getting started on my own project, thx for sharing yours !
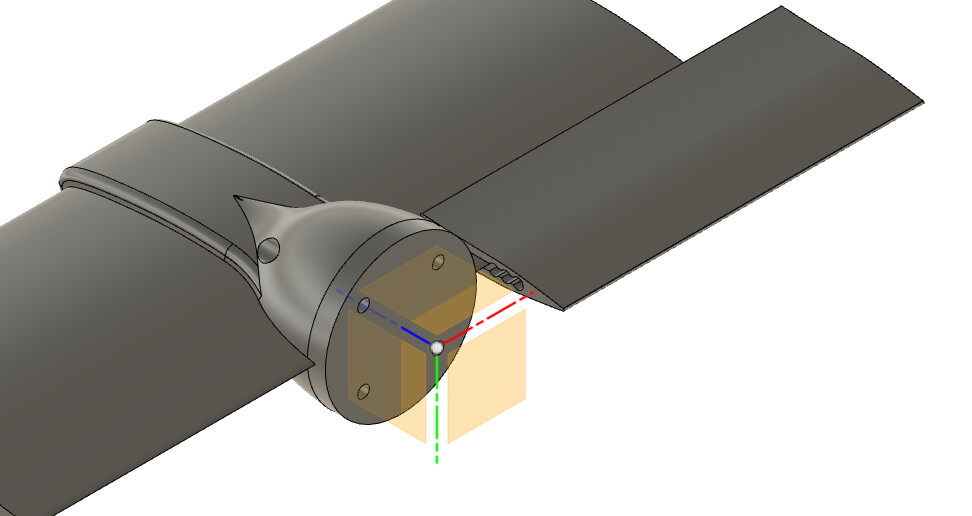
Why not putting the box in the middle of the board rather than at the back ?
Renaud.
I do not have enouth wire length, plus the board does not have a hole to run wire throuth. Because the board has no straps holes, I need a flat surface without grip foam to mount the velcro.
But it would solve most of the connection problems and improve COG.
When you look at the pictures, it still feels like the foil has the wrong attack angle.
I also use it for pump foiling and it is not gliding like I want, I feel stalled unless all weight is on the front, but it is like an airplane with too much UP trim. It will fly if enouth weight is UP front, but it will not glide well or require lots of motor power.
In dock start one Guy had good sucess with the 48cm rear wing, so I ordered one for tests. In the meantime I will design a New mast clamp, slip on in hard tpu.
It is something new you designed?
Can you send a file for the design software to view it?
How does it work?
Why did you decide on the TPU? I read that aside it being flexible, it is the strongest material…
I did some light sanding to make them smoother. I also tried acetone vapour, but I did not have a good set-up. It could be the best solution as it also increase layer adhesion.
ABS might work, best material I used to print props so far is eSun PLA+ (the plus is important). This stuff is really strong, if sanded it gets also very smooth. Use 100, 200, 400, 800, 1200 grit. Only con is the relatively low melting point, better not leave it in the car parked in the sun (in summer).
The mount printed correctly, very clean, seems strong with good layer adhesion, happy about that after 24 hours of printing. Used this stuff before for drone gopro mount, took some 150kph hits fine.
I checked the rpm, loaded rpm is only 1400 or so.
So I tried to cut down the prop. With the prop small like this, I had 2400 rpm, but not enouth torque to start.
No load is 4100 rpm, so really in the Bad efficiency range with very high phase amps, and controller overheates. The vesc is set to 100A phase, I feel like more will only make things worse ?!
I managed some good runs 200m or so on foil, reduced the throttle, but overheating stops me after a while.
Some pics, I left my phone running but with the sun and the field of view, did not capture the best runs!