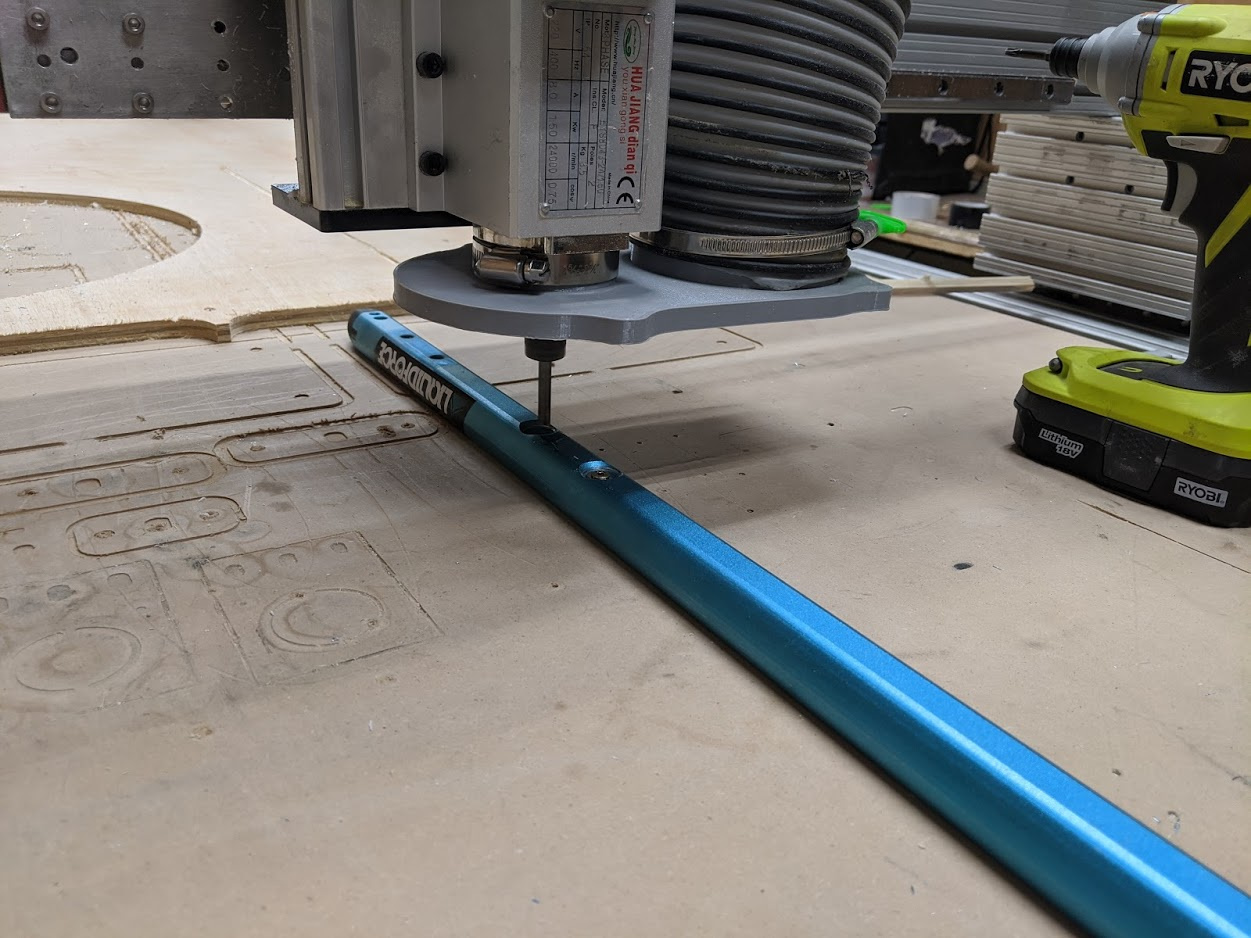
Got my CNC up and running and was going to cut out a foam block for the board.
Got a quote for 6" x 48" x 96" eps block for $74. But I have to get 6 of them… anyone in the CO area need a blank?
Got my CNC up and running and was going to cut out a foam block for the board.
Got a quote for 6" x 48" x 96" eps block for $74. But I have to get 6 of them… anyone in the CO area need a blank?
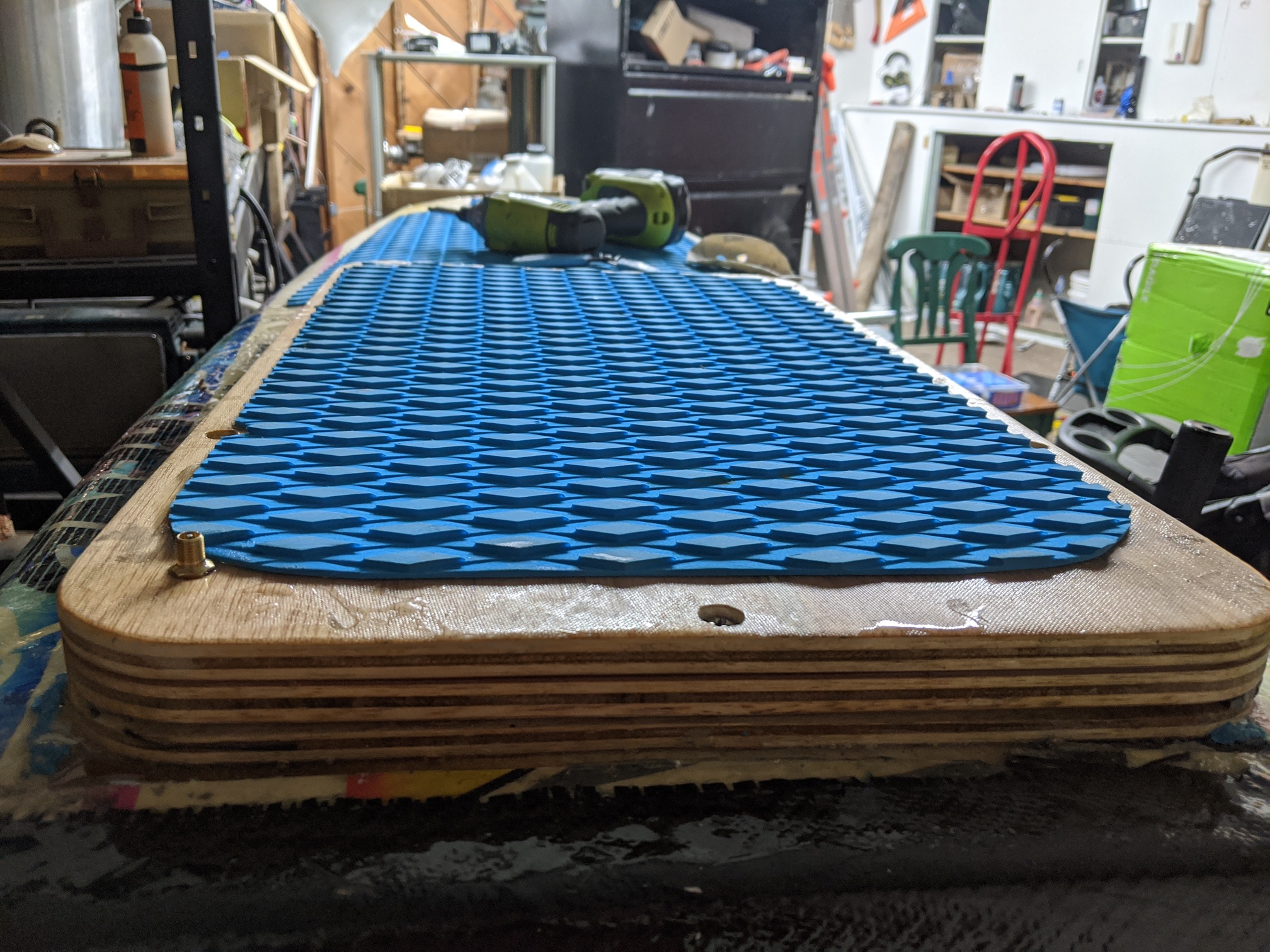
My first build was with a LF Happy foil. Mounted on the foot pad mounting holes. Bought my foam for the second board from Greenlight Supply. Went with a double stringer spaced 11" apart. Shipped UPS real fast and inexpensive.
Second flight!
Lots of ripping around last night! 12s12p battery gives me about 35-40 minutes on constantly on foil
Updated my Liquid Force fuselage to accept a slingshot mast and took the happy foil for a ride last night. Looking at the arc200 logs it looked more efficient and faster… but a little more tricky to ride. Got up to 22.5mph max with I think full throttle.
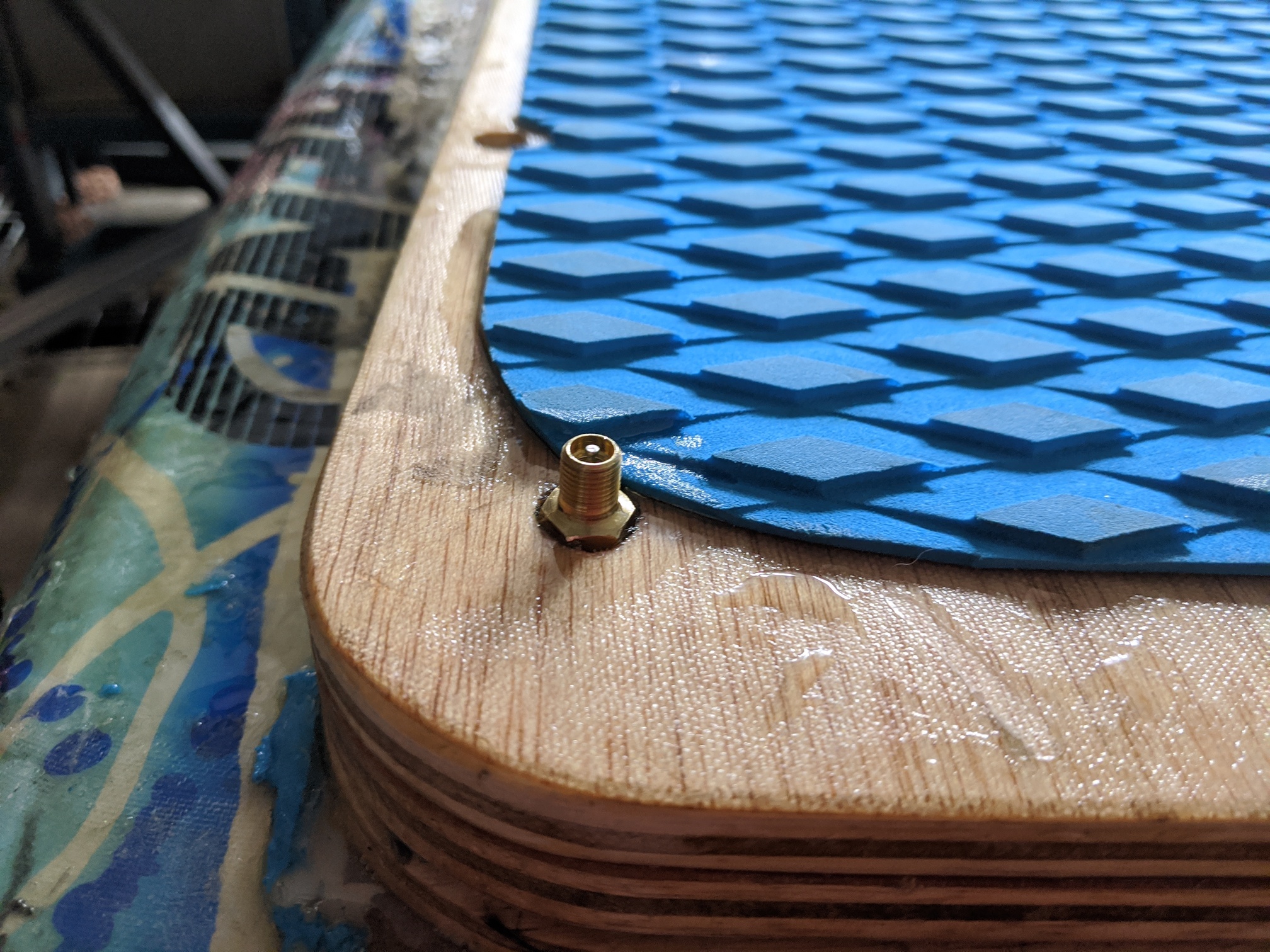
Countersunk the hole after that.
Vrroom, another great session on a local lake. Moved the foil to the B position with the spead skate and puts my wait much farther forward. So much so that my back foot would probably want to be located right behind hole right the pelican case, especially at higher speeds. Turns are way easier though.
@Flightjunkie inspired waterproof battery box. Should be receiving the plugs in the next few days and I’ll be able to get everything together and back on the water!
Great start. Let me know if you have any questions.
I did 1/2" sides, 1/4" bottom, and 1/8" top. Acrylic. The reason for the 1/2" sides is to have wide surface for the glued seams and 3M taped top.

I got 1/4 sides, 1/8 bottom, 1/8 top. Hopefully that is enough!! Also trying to waterproof the area around that as well… so hopefully not much water gets in there anyways…
Misreading the tech spec well when I was CADing… Holes are 1.75 not 1.5
Had to increase the size:
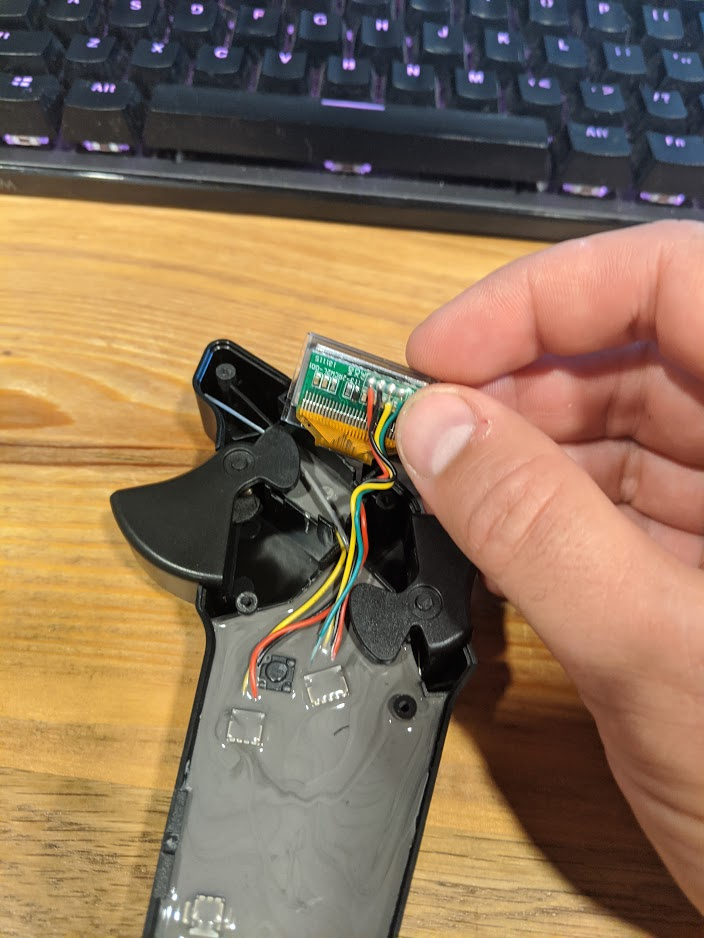
Also got the maytech efoil remote (new rev…?) LCD still isn’t coated, but everything else looks OK. Hopefully will do fine in fresh water… Should put a layer of conformal on the lcd.
Waterproof test with the bike valve and a air compressor! Saved me from multiple trips to the lake to test waterproofness of my box!
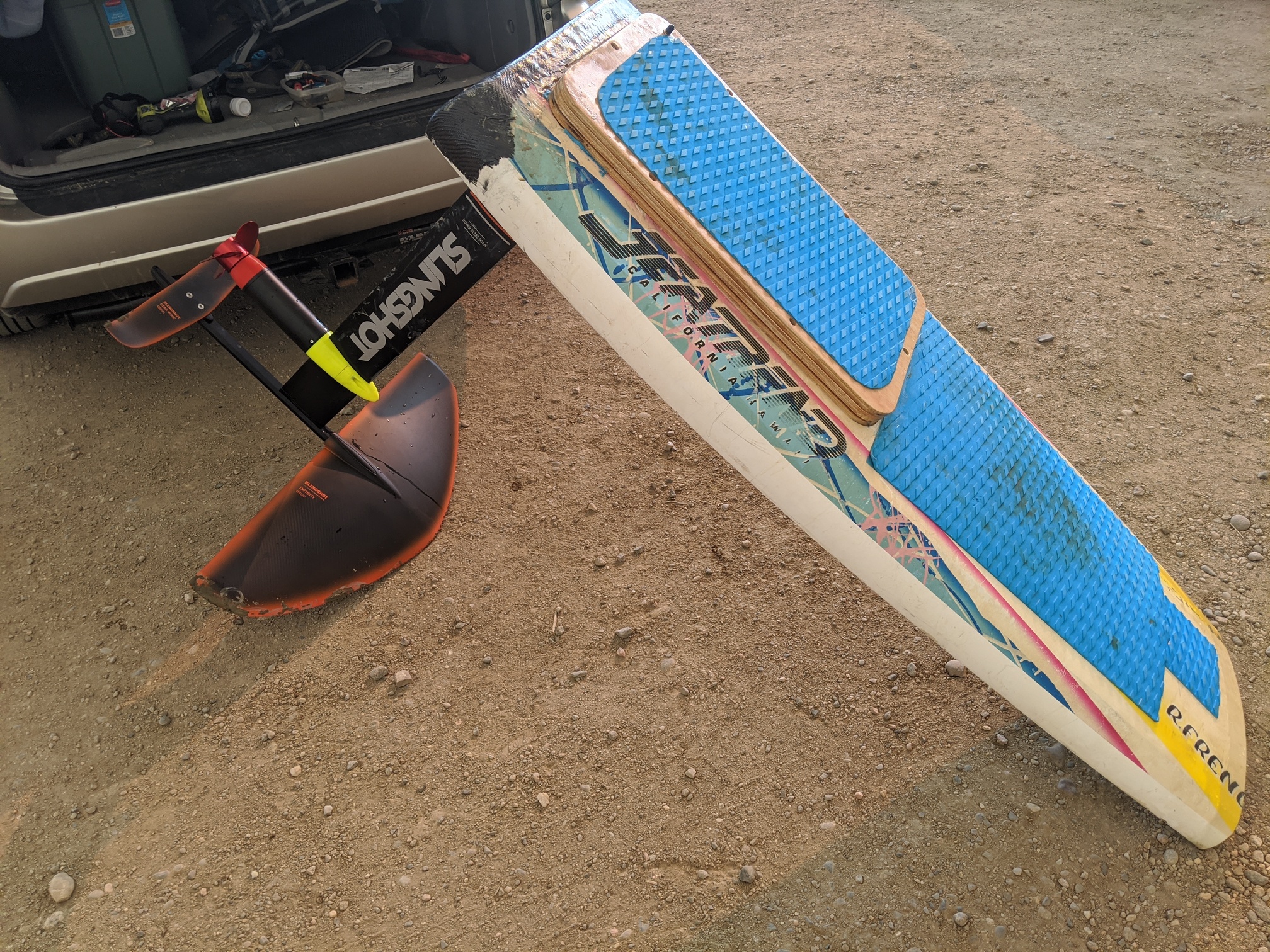
Back on the water with light from the Colorado wildfires. Trying out the slingshot 84cm infinity foil. Efficient slower ride.
Hello Brycej,
I ended up useing the same configuration than you, using an arc200 with a Flipsky 65110 120kv under 12s.
I used to have a 640kv with a gear box before the flipsky and I was doing well, have enough torque to fly quickly.
Yesterday was my first attempt with the flipsky + arc200 and never manage to fly. Everything works perfectly and is smooth but I have not enough torque to fly. I don’t know if it comes from the 12s, the Flipsky or the configuration of the arc200. Would you mind sharing your arc200 conf so that I could maybe correct something wrong ? Are you under 12s or 14s ?
Cheers,
Matt
I’ll grab it next time I connect it up.
The biggest thing that helped me was bumping up the motor/phase current to 150A. I think the default was 50A which is way to low.
I have been experimenting with RPM mode, which I must not have something set up right because I am getting a less power in that mode. But Torque mode for me had worked welll.
Bryce
Thank you Brycej.
Indeed Torque mode seems to give better results and I already set the right parameter regarding the motor/phase current. I could maybe blame my lipos that are getting old and worn out, and don’t give enought power now.
Does anybody know what it does when lipo are dead ? I can still charge them quite easily…
Thank you !
Matt
The lipo will sag a lot more under load. Couple volts isn’t a problem at 12S, but >5V might be. If you pull the logs from the ARC200 you should be able to see how much it is doing that. A lipo (not li-ion) will also start to puff up a little and get hotter (internal resistance goes up so at high currents it generates more heat)
Thank you. Well I don’t manage to get up now and everything seems to be ok. I’m on 12s2p with 4x8000mah lipo.
Unfortunately I don’t have access to the USB cable and only use the bluetooth interface so that I don’t have access to log 
But I should see it in the telemetry…
RPM mode tries to get to a set RPM with minimal current and as a result doesn’t ever get the prop to the correct RPM with a direct drive motor.
Torque mode is a much better option for direct drive.
Have you also set your battery current up to about 130A. If that is too low, then it will also prevent your phase currents from getting up to where they need to be…
Check your logs and see what your voltages are sagging to under power.