This i did with two motors, there was no effect. Next step will be to build an interface between these stubs and the ESC. In my case its usually a long way with more than 2 meters cable, 3 phases and several epoxy sealed soldered connections. Thinking about simplifications…
I use a cheap insulation tester that is normally used to test electrical motors for bad insulation.
2 Likes
Just ordered my powerglider motor. I will be testing this one with submerged dielectric oil cooling. I just finished testing the alien 5065 outrunner and maxed it out around 2000W. Hoping this 4000W motor will do the trick!
Depending on your application you should order also a stainless steel shaft 10mm, not hardened or only thin surface hardened and precise. E.g. to mount such prop is ideal:
http://www.ebay.de/itm/Aluminium-Propeller-fur-Aussenbordmotor-Bootsmotor-Ausenborder-Neu-180-mm/252493619355
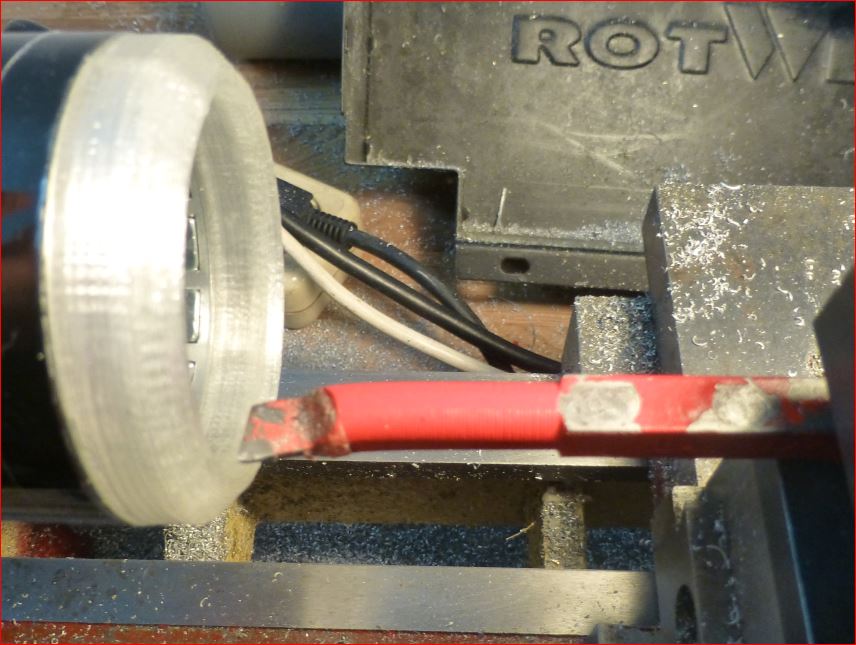
You can cut it down in a lathe.
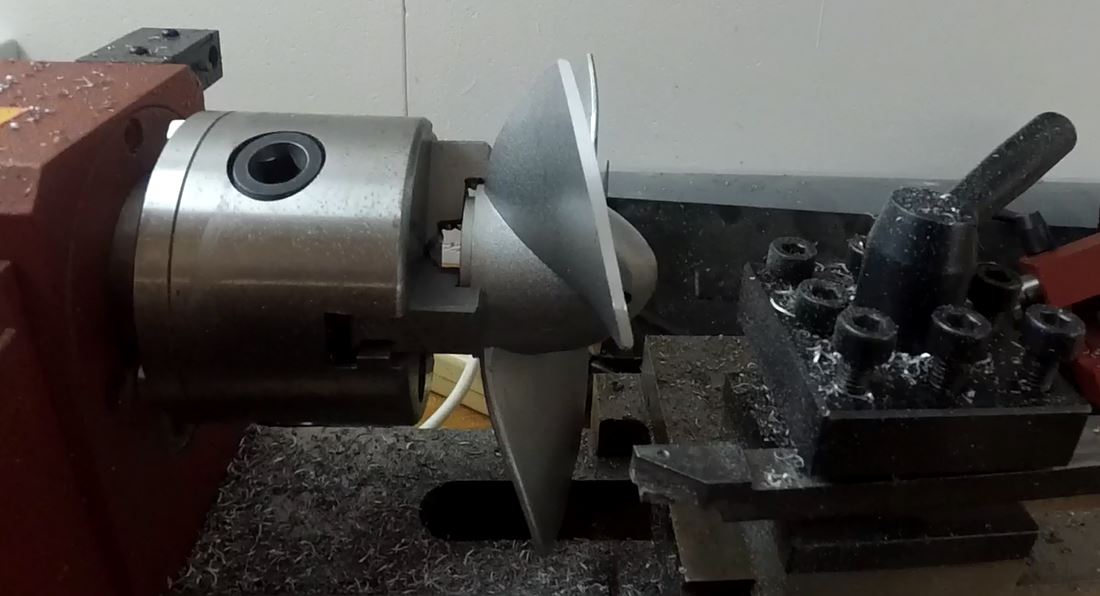
Let it run backwards and turn the tool around to reduce gear load. I had luck, a friend lent me his aluminium cutter.
I plan to cut out part of the hub and put the motors rotor end directly into it. Print out two parts to make the hydroflow continuous from turning rotor to some nose end. Include the water cooling outlets into it, so no sand can come in (if standing still).
2 Likes
Nice, love the pragmatically use of the lathe!!!
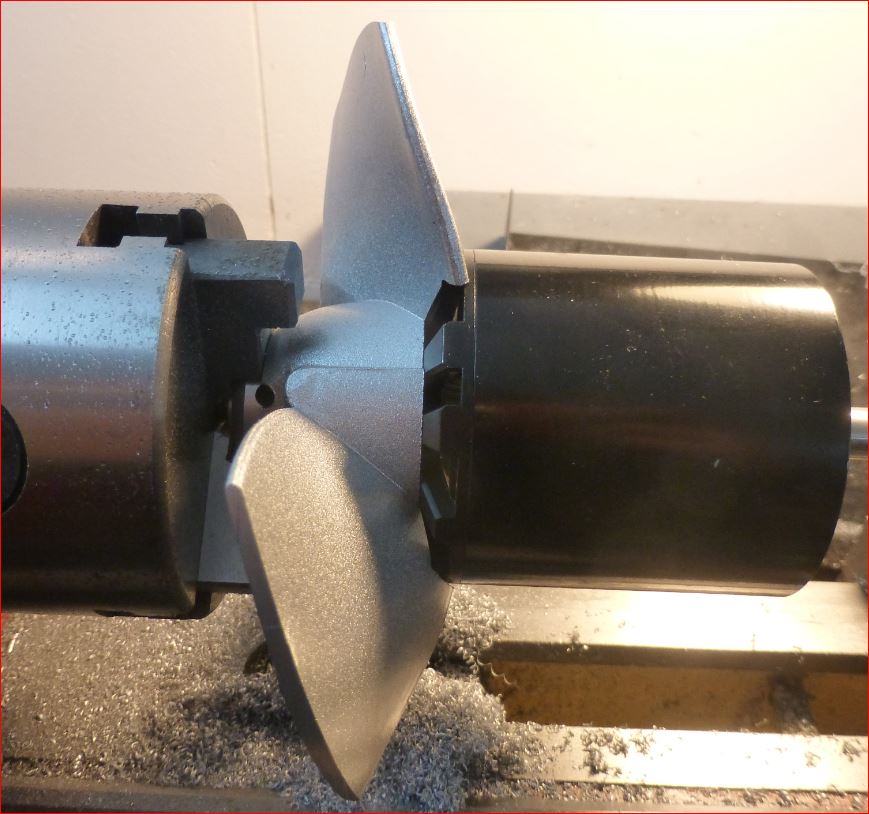
Thanks Hiorth! Here come some more pics about lathe!
To clamp the hub from other side i turned some adaptor.

Now this prop is really short.

Test the rotor fitting to props hub.
I managed to make the spinner from one part 3D printed with some support.

I plan to fill this with epoxy. We come back later to this.
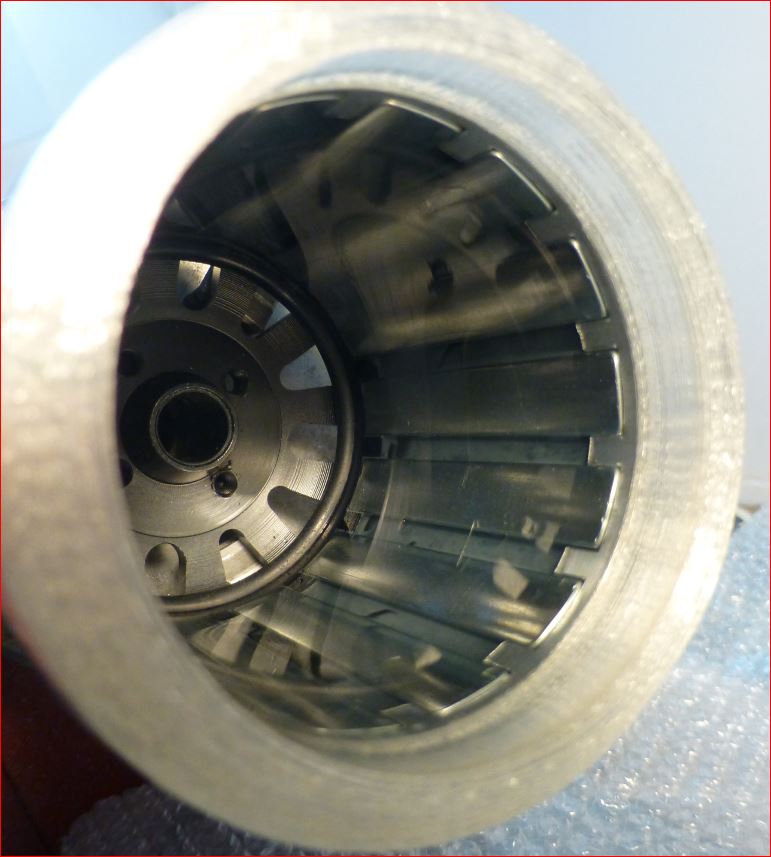
First i have to epoxy the rotor magnets. You need to tight both ends of the rotor. For the inner part i use a rubber ring, R-32 ,ID 50, SD 3.55mm which i place inside the rotor and push it as near as possible to the rim of the rotor. Its a little big, so it sits very strong. This is the 4th rotor i am making, and they all worked perfect at that place. Use aceton or isopropanol to take away grease from the rubber.
Other end is also rather simple, i used some rings made of solder bobbins which i mount with tape to the rotors open end. This time i had no bobbin over, so i printed the part.
For this is use a ring of outer diameter 63mm, ID 53 with a kind of emergency reservoir.

This reservoir allows you to not overfill the rotor with epoxy, if you overfill the abandon epoxy will run into the reservoir.
I used 25ml without overfilling (hope it was enough).
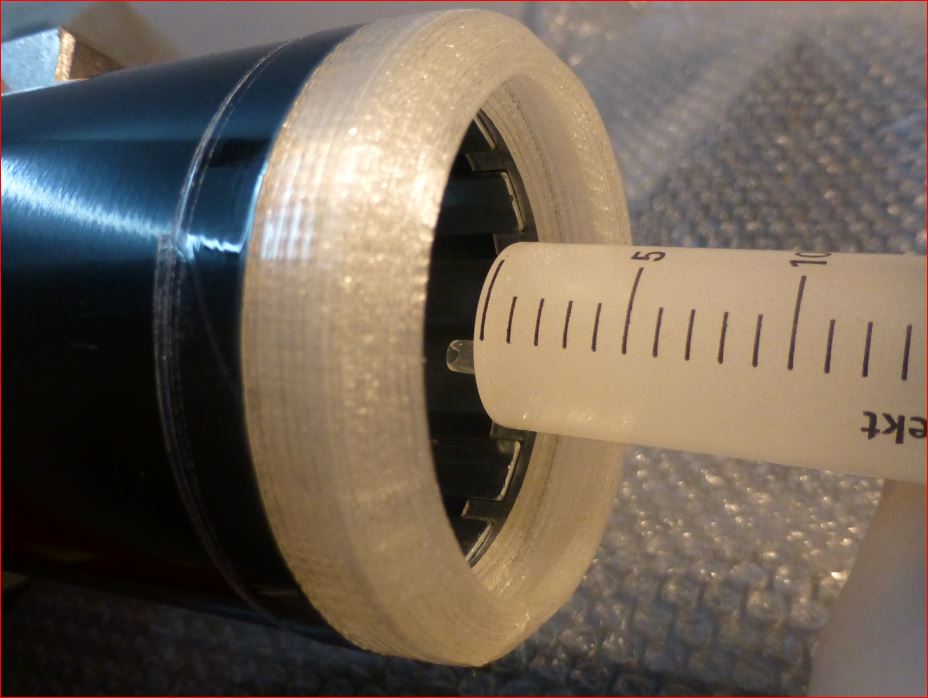
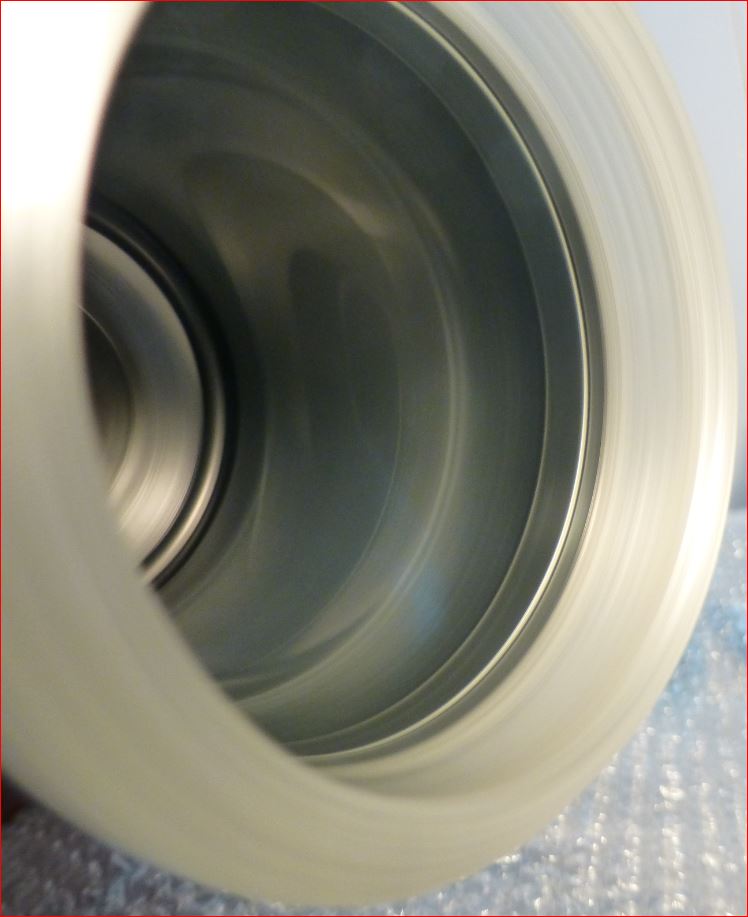
Put the tip of the syringe into the middle of the rotor and carefully dose the epoxy ml by ml while rotating at more than 1000RPM. In the end you should not see any fragmented reflexions. Never stop the rotation! If you have a power outage or stop, be very careful, make sure no epoxy dripped over the barriers and start from low RPM, otherwise the epoxy might get on you! For this reason i do not mount the axle while epoxying. If you stop, the epoxy drips on the axle and it will spray if rotated again. Avoid anything which could cause a mess.
I use 40minute pot time epoxy.
I let it run at 1250RPM two hours. When it starts to gel i reduce to 300RPM or so and let it run for several hours. If you want to speed up by warming, you have to be very very careful. The tape which tightens and holds the ring is temperature sensible and can get loose if heated by e.g. hair dryer. The epoxy will be sprayed over you and everything around giving everything a new finish. If this ever happens to you, dont panic. Let the epoxy drips where they are, do not try to get it out of your hair or cloth, you will only worsen things. Let it just where it is until its almost hardened. Than brush it away. So i will not warm it any more, but just wait and listen to the howling lathe.
i am happy!
6 Likes
Great tutorial! @PowerGlider, why do you use so long time curing epoxy and not 5-20min one? (Suppose to shorted the overall time of the motor epoxying)
Yes, 20 minutes would have also worked, but i only have the 40 minutes hardener. 5minutes is definitely too short. 5 minutes epoxy is usually also thickened so its no good choice for casting.
So, some more lathing today.

As the ring is printed in PLA with the bed side facing the rotor, it is not really glued by the epoxy to the rotor, it separated very easy! So epoxy is not the best solution for glueing PLA!
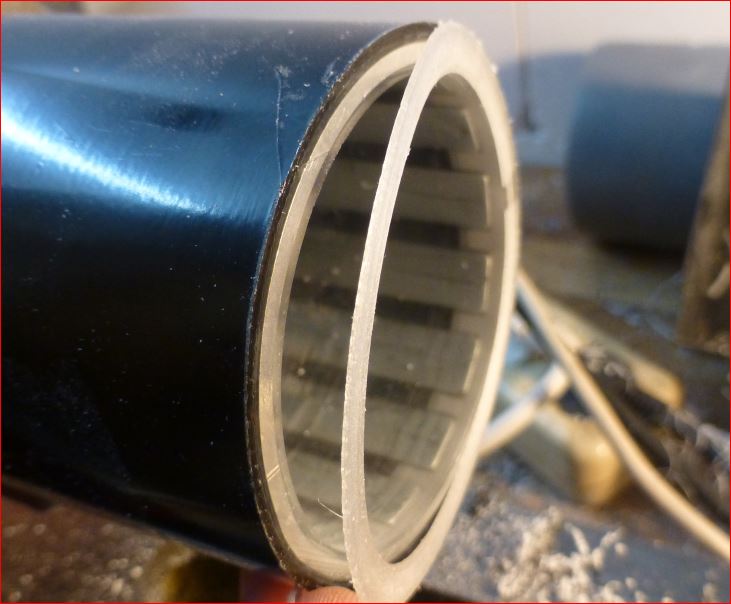

Notice the opened epoxy. I always have this somewhere happening. Happened at 53.5mm inner diameter. I made some more runs, but only at the end of the bell. It seems to me these bells are slightly conical, it never happens at the end of the bell where i have the greatest wobble from clamping inaccuracy. So at the inner part i could open to 53.5, at the end its 53.6mm.
I do this epoxing for optimization of hydraulic losses, to get it watertight i would use something called Plastic 70, its used for making PCBs waterproof. Take your own decision if this is needed.
5 Likes
Tonight i want to present a solution for the spinner, kind of enlarged hub of the prop.
The problem is, you wil never find a commercial prop which fit your needs perfectly. Mostly it is too small compared to the diameter of the motor, so one would have to make a kind of adaptor, which reduces the diameter of the motor to the diameter of the props hub, to make the water run without disruptive diameter steps which causes caviation. This will add some length to the drive system, which leads to higher forces, vibrations, bearing stress etc. and is therefore unwanted. We want to keep the system as compact and short as possible. Ideally the prop would sit on the rotors diameter and enclose it completely. But from that edge where the rotor ends we need some spinner anyhow to avoid cavitation. This spinner could be turning or standing still, it also can be parted.
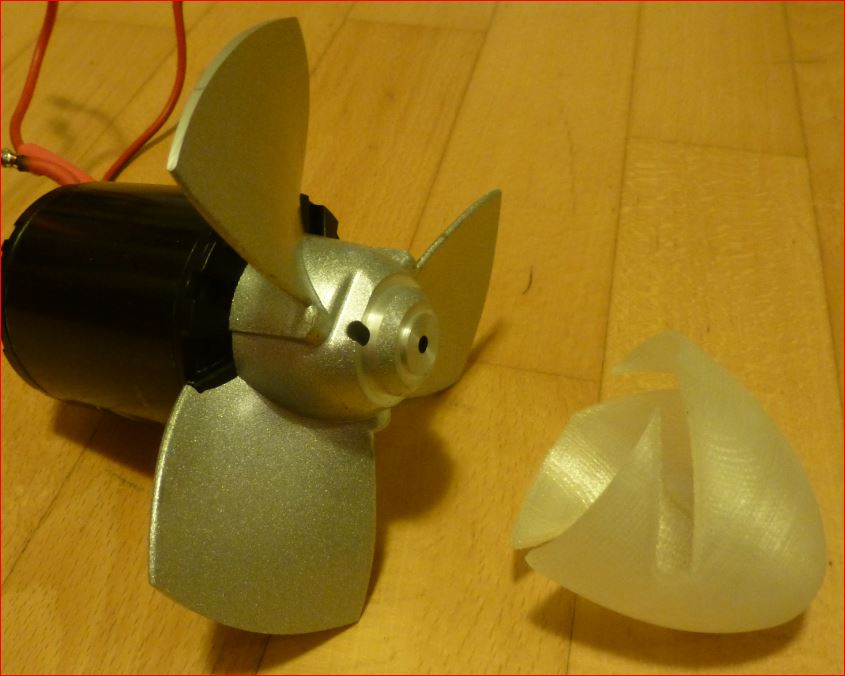
So why not integrate the prop into the spinner and let the prop partly enclose the rotor.
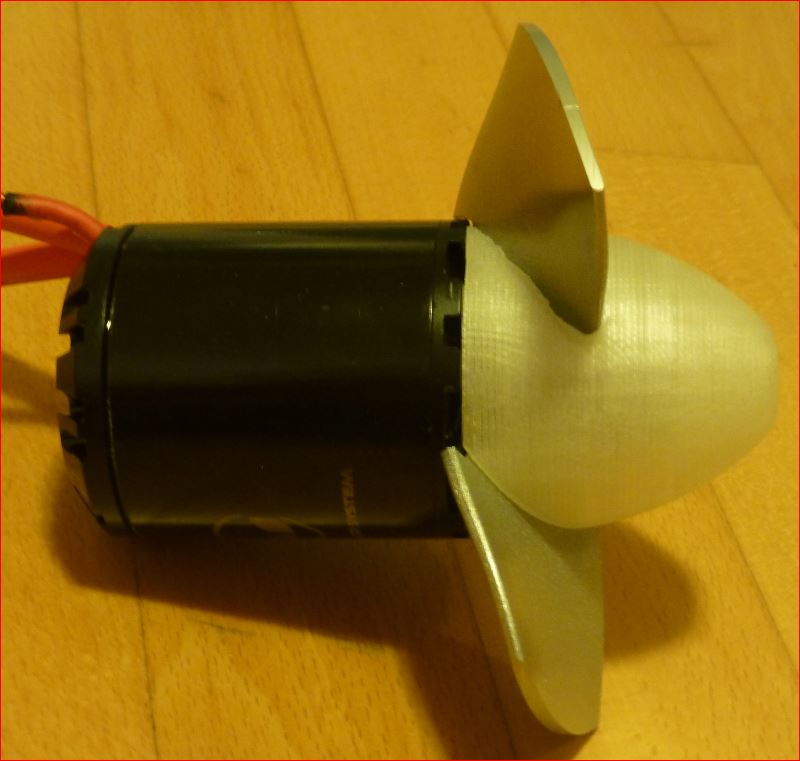
I am not so good in retracing this unique prop design, so i kept open some spiral slots, so the prop falls into the 3Dp spinner and has little gap. It is printed from clear PLA with break away supports with 3mm wall thickness, the small end is on the bed, like a cup.
The gaps i filled with 5 minute epoxy which is thickened by default and has some nice features as it holds together in a viscous form. It can be driven into the gaps between prop and hub to tighten and to get nice curvatures. I use a 3x10x200mm balsa wood piece to mix and manipulate, on the cavitation side with a radius.
I also do this, to get the spinner and rotor tight to be able to cast it with epoxy. Took me two rounds, wet in wet technic.
I would have liked to use 40 minutes epoxy but the amount of 140g i estimated took me to the long curing casting epoxy again. I have time to do so. I can wait. I know why.

I filled in about 100g epoxy into the spinner and props hub, so everything beyond a certain level is massive epoxy, aluminium, pla, stainless steel. Apropos: I put two stubs into the threads of the rotor face as drive pins to have some kind of insurance in case the casting turns out bad in some way and cannot resist the torque for some reason.
The pla upmost edge is the level of epoxy, it will run over it. Take care it is perpendicular.
Check the outlets, they should be opened.
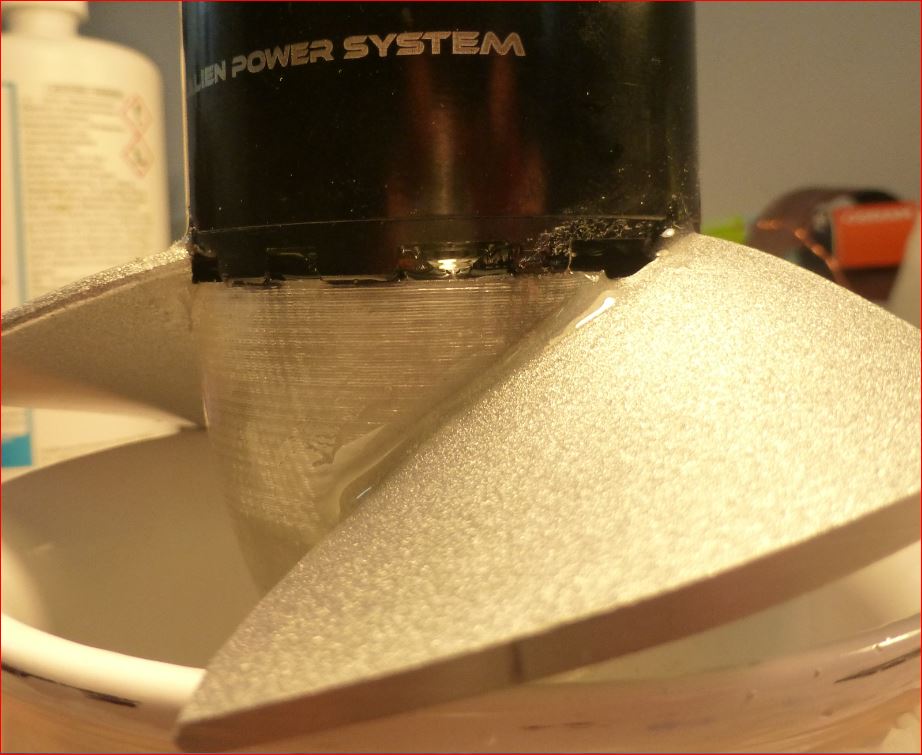
View from top, where i filled in the epoxy and wiped the rotors inner diameter with some epoxy.

to be continued…
…luckily i kept some mixed epoxy in the fridge while i was warming this monster. After 10 h, the epoxy inside the motor and spinner had shrinked or vanished, so i took the rest and put it in, so it was running over once more. This time it went very good. Just tested the motor with prop, uses 76W at full throttle in air, almost same as without prop and spinner and without hydrodynamical optimizations.
4 Likes
Hi @PowerGlider your progress looks very nice. Please keep us updated with your work. It is very valuable!
Hi Guys,
I decided to give the direct drive a try. Can anyone help me with the decision which motor to use. I want to build e-foil just as fun project not for commercial purposes so I am going to share the design process with the community. I was looking around and I want to try Alienpowersystem’s parts. The setup will be our custom large wing which we already have and surfboard with total weight about 100kg with the rider. Is following setup ok for start (we are not after huge speed but long lasting ride)
alienpower 83110 Outrunner BLDC motor 180KV 7KW water cooled motor
Alien 200A 3-16S Evolution 3 ESC HV-Sensored
2x MultiStar High Capacity 12000mAh 6S 10C Multi-Rotor Lipo Pack XT90 (just for start of development)
propeller Pacificmeister’s design and torqueedo cruise inspired one
thanks for all advices
1 Like
Just a suggestion with the batteries. If you’re after a long lasting ride, it would be better to go for a minimum of 20000mah
1 Like
Thanks for reply, I was also thinking of multistar 20000mah but now the most important part is “right” motor
1 Like
Lets try a simple approach. Start with your end velocity you want to reach, lets take 20km/h. You choose a voltage for the batteries. Lets take 48V.
Correct layout of propeller pitch suggested often is that you have around 25% slip. For very small propellers in a duct this can increase, so lets say 33% slip. I use a prop with 5.25" pitch.
By this you calculate the needed RPM/V=Kv for your motor.
v = V_bat * RPM / V * pitch * 0.66
For the 180Kv motor you get 48V * 180RPM / V * 5.25" * 0.66 = 8640 RPM * 0,088011m = 760 m / min = 45,6 km/h. OOops - that was way too high. You might never reach this velocity because the power demand might be higher than what your system can provide. If latter is true your system needs adaption somewhere.
Cutting down the voltage could be an option, but than you reduce power density in your motor linearly.
Using a lower pitch prop could be an option, but you loose efficiency and end up with very small props around 100mm i guess. On the other hand virus built his jet system with rather high efficiency, so you could give it a try.
So for best efficiency you should have a motor with 100Kv or less. If you doubt that an 6384 100Kv PowerGlider can handle your task, ask Bruno if he can deliver the 83110 WC with 50-90Kv.
But be careful with the watercooled versions: If you do not want to let it run with water through the windings, like i do, you get definitely worse cooling. You need an additional housing around the turning rotor and you need the sealings for the motor axle. All this adds drag and complexity. So another solution could be to use a 80100 with 80 or 50Kv and a larger prop and let run submerged with a pitch of 6-8".
If you want long distance, go for minimum 30Ah 12S.
All this is only an opinion based on some rough estimations and little experience.
6 Likes
thanks for the information. The open version is also possible because we want to ride it only in fresh water - river, lake, not salty sea water so water cooling through should be ok.
Hello! I looked through the page several times, but I can not find to what diameter you have turned the propeller. I came across a figure of 140mm, did you stop at it? I’m now adapting the propeller from the topic “Pacificmeister Build Info and CAD Sources” for use on the 6384 100Kv PowerGlider motor, but I can not decide on the diameter.
My duct has inner diameter of 140mm and i cut the prop further down to around 138mm.
I recommend to use commercial props at the moment, because nobody here in the forum was able to outperform them. Home Made Flume - #41 by PowerGlider - Props & Ducts - FOIL.zone
All the home made props suffer from low mechanical stability, which is very important for high efficiency so i decided to use something proven. You get a thrust of 20-30kg, which the blades must bear without deflecting too much. So if you print in 3D make sure you have thick blades at least at the hub in the blades roots and the cord at the hub should be very long.
My first design had 175mm diameter, but that was definitely too large for the 130Kv motor.
I was not able to test my new setup yet in water with prop, so many parts to build and my 3D printer is kidding me with failed prints.
1 Like
I do not like the idea of using an industrial propeller because of the fastening to the motor. Pacificmeister successfully uses the printed propellers, there are several ways to increase the strength:
- Proper preparation of the model for printing.
- Temperature treatment in the oven to eliminate internal stresses and build up the field connection.
- Processing with chemical solvents to improve the sintering of layers.
In the end, there is a method of casting aluminum in a burnt form printed on a 3D printer.
In any case, for me, while e-foil is an experiment, rather than a commercial project, so I’m interested in doing everything myself)))


I think you could do the job with 3d printed props, just use some rigid and resistant plastic. Polycarbonate works good (these two, 143mm diameter 200 and 260 pitch, epoxy coated), designed with Javaprop and “shaped” in SW.
At work we’ve a testing pool (for bow thrusters trials) and I tested ASA and PETG 110mm 5 blades prop up to 5K rpm, 35kg thrust force, no damage. Over 4K and something the 110mm give up to cavitation. Still have to test those two in photo with efoil but I guess they will hold the strain, they’re more rigid than PETG and even than ASAUploading…
1 Like
Those props look really nice, must have little to do with what java prop generated.
The quality of surface is very good at first glance.
The pitch is almost the double of the one i am using.
I think, that printing the aluminium prop with around 130mm pitch in PLA or whatever recommends a lot of support, especially with all the cutouts to adapt it to the motor.
But it really looks great, congrats!
I am also using epoxy to complement PLA, so far it is nice to work with, although not the perfect combination i guess. At least the PLA soaks some epoxy in and makes a better part together with less effort than casting epoxy.
Maybe i should use some glas fibers on the outside surface of the duct to make it stiffer and more durable against mechanical stress?
I prefer to use PLA for non rotating parts, the spinner is an expection, filled up with epoxy. I do not believe, that any printed plastic is as durable as marine aluminum, i do not want to regress in material selection too much.
Also, for other parts i use different materials like the fin, which is used and was shortened to be less harmful. Its made of high density glas fibers. What i find cheap and proven i give a try. Undogmatic.