Today when foiling and water being totally flat I fell several times as I had no idea of flight height when cruising. Sometime I breach and sometimes nose hits the water (rifle case) and it all happens suddenly - quite annoying.
Then I saw Waydoo having this flight assist thing where it automatically keeps you at certain height and it seems to be working really well. They seem to use ultrasonic sensors… why not build this system myself?
First step would be sensor indicating the flight height somehow instead of autopilot.
Haptic feedback is first that came to my mind. Having the remote vibrate would be ideal but integrating my Flipsky remote that way might be difficult. So instead the first prototype will use haptic motor under my feet indicating too low height or too high height with different frequency patterns. Rifle case efoil is optimal for these tests as there is plenty of room for this stuff and the motor can be placed freely.
I’ve ordered the parts - lets see how this works out.
Anyone done this kind of things before?
Anyone have any idea how could I trigger the haptics in Flipsky remotes from VESC via custom script or something? Also it would be nice to be able to turn this thing on and off from the remote somehow. I guess custom firmware is not an options so it would be some kind of trick/hack using some other functionality.
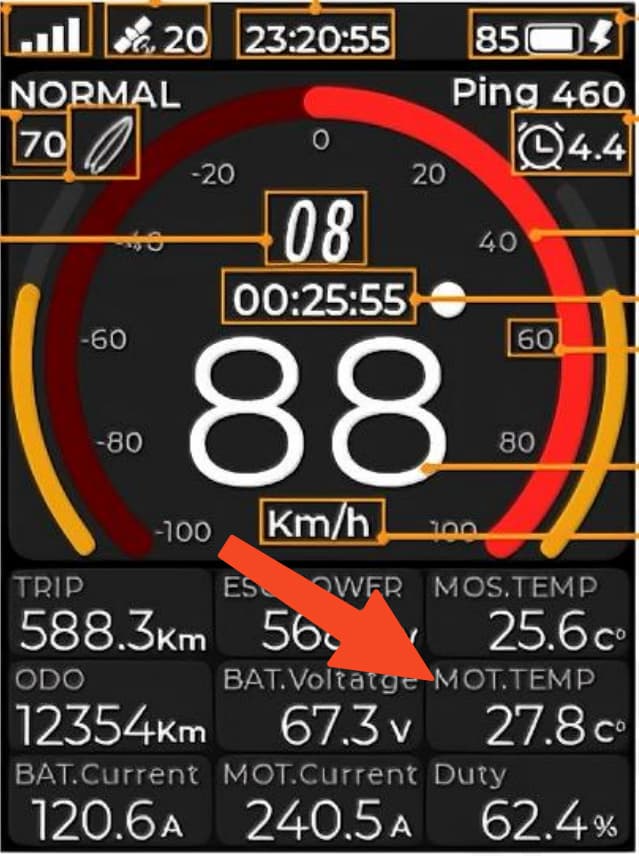
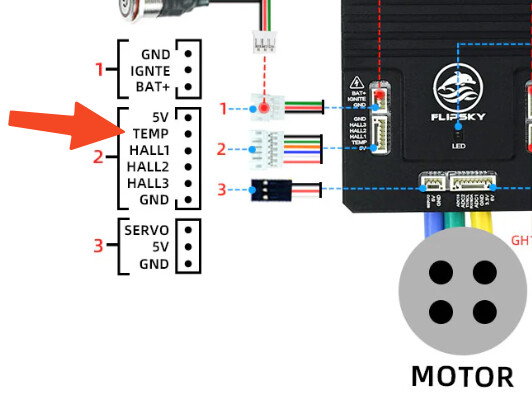
Another idea: What if I connect the ultrasonic sensor to motor temp pin on the VESC? This way I could see the height on the remote as “Motor temp”. Need to figure out a way to “output resistance” to the vesc from arduino… Or is there some way to read it in a digital format without custom vesc firmware?
How about putting a physical attachment on the mast. When you dip the mast to deep you will hear it immediately as it touches the water
It does not keep you automatically at certain height but I am sure you can train yourself to do so
Hi,
I am also thinking about building a “DIY flight assist” in my upcoming e-foil board build.
My idea is to use a ultrasonic sensor (A02YYUW) for distance to water. Gyro/accelerometer (MPU6050) for board angle and possibly integrate it with the BremoteV2 to automatically adjust the throttle. Since BremoteV2 is opensource it should be quite easy to integrate it.
I will probably start the build during the winter.
Lets keep each other updated on our progress!
Jonas
The difficult part is to get fast an accurate hight values as the ultrasonic is deviated by swell. Th theoretical maximumnis likited by sound speed, 343m/s. I manage to get 50 values per second. Then you can either fiter or take the average of every n measurements. Or even both. Stable contradicts fast, so you have to find the right balance.
Not a big problem in my case, just some LEDs jumping around, but if you want to use it to adjust the board, the values need to be fast enough and reliable.