I used a free afternoon to quickly sketch a waterproof remote that I thought of. It would use an IP67 certified potentiometer and push button, the button is located on the upper left side to be pressed and hold with the thumb. The trigger holds its position and will not retract, the position is accurately measured by the waterproof potentiometer. The throttle value will only be transmitted while the push button is being pushed, it acts as a dead man switch. There will be a separate compartment for the electronics that can be completely sealed.
Other planned features are:
433 MHz link
LiPo battery
Qi wireless charging
I consider using an Adafruit Feather clone.
I will print a PLA prototype soon, final version will be ApolloX (ASA). Until then any thoughts and suggestions for improvement are very welcome
Great job on the CAD. I own this remote too, I use it for my Eskate too. Only thing I see here is that you could re-shape the rounded cylinder as it is initially meant for controlling a servomotor on a RC car and we don’t need it.
Also regarding the trigger, we don’t need to brake so one stick would suffise (rather than 2 showed here)
@millesth Thanks for your suggestions
The reason I left the cylinder is that I wanted space for the potentiometer, but I think it will fit without it also so I will inspect this and may remove it.
The second stick is there to reduce the throttle by pushing it forward since the current design has no spring or anything, the throttle trigger always keeps its position, therefore the dead man button on the side. This is intended because I think it gives more precise control over the throttle and allows simple cruise control by just taking the finger out of the trigger. A quick immediate slow down can then be achieved by simply letting off the side button with the thumb. But I haven’t foiled yet so I don’t know for sure if this design is a good idea.
Any comments on that point are welcome!
Alright, now I understand better, great Idea.
Yoou could also easily add a spring, but cruise conntrol might be cool as soon as you know how to foil, but in order to climb the leanring cruve I believe that you need smooth control of the power input to the propeller, meaning that a spring is probably needed. Best scenario would be to have the possibly to de-activate the spring !
Hey, Fabian. I am interested in getting your remote. I couldn’t find a way to PM you, so maybe you can message me? (or just email to mrevpatoria -at- mail at Google). Thanks.
@Dandydan I updated the design by removing the cylinder and one of the two sticks of the trigger and adding a spring (so no more cruise control, but the trigger can be swapped and the spring can be removed).
I printed a low-res prototype in PLA, size and feel is pretty good but I am somewhat unhappy with the overall concept. That’s why I am currently designing a second prototype in CAD with a slider throttle control. I see a greater potential in this, much more precise acceleration and cruise control.
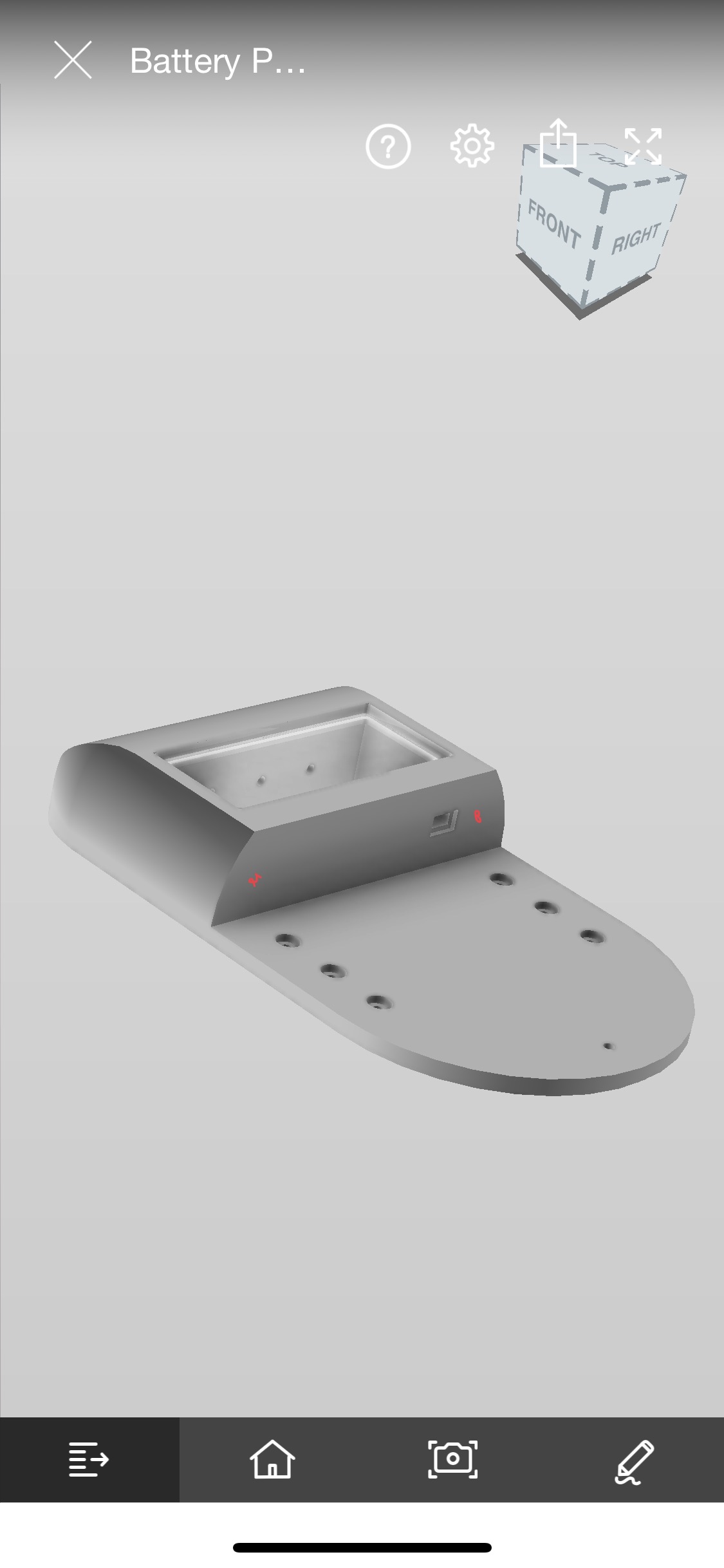
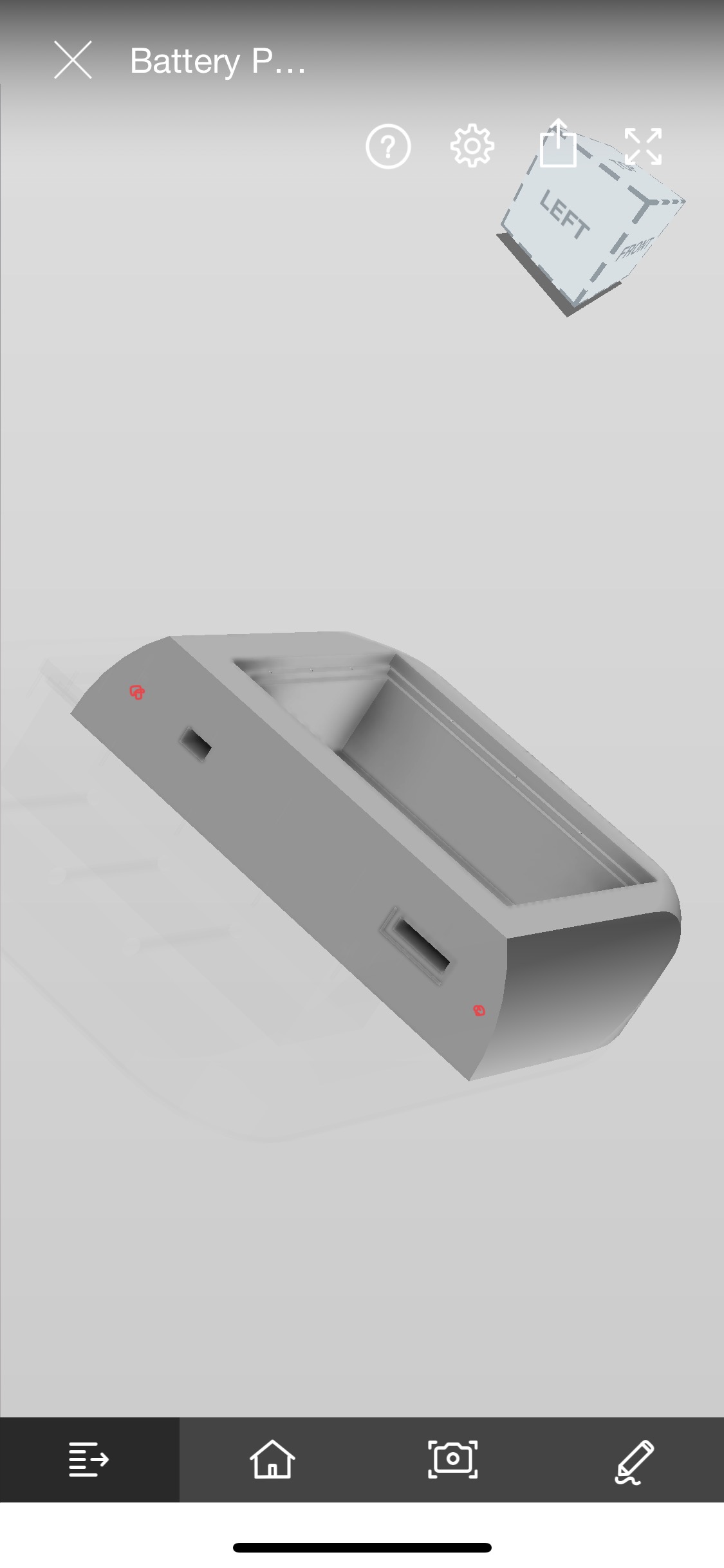
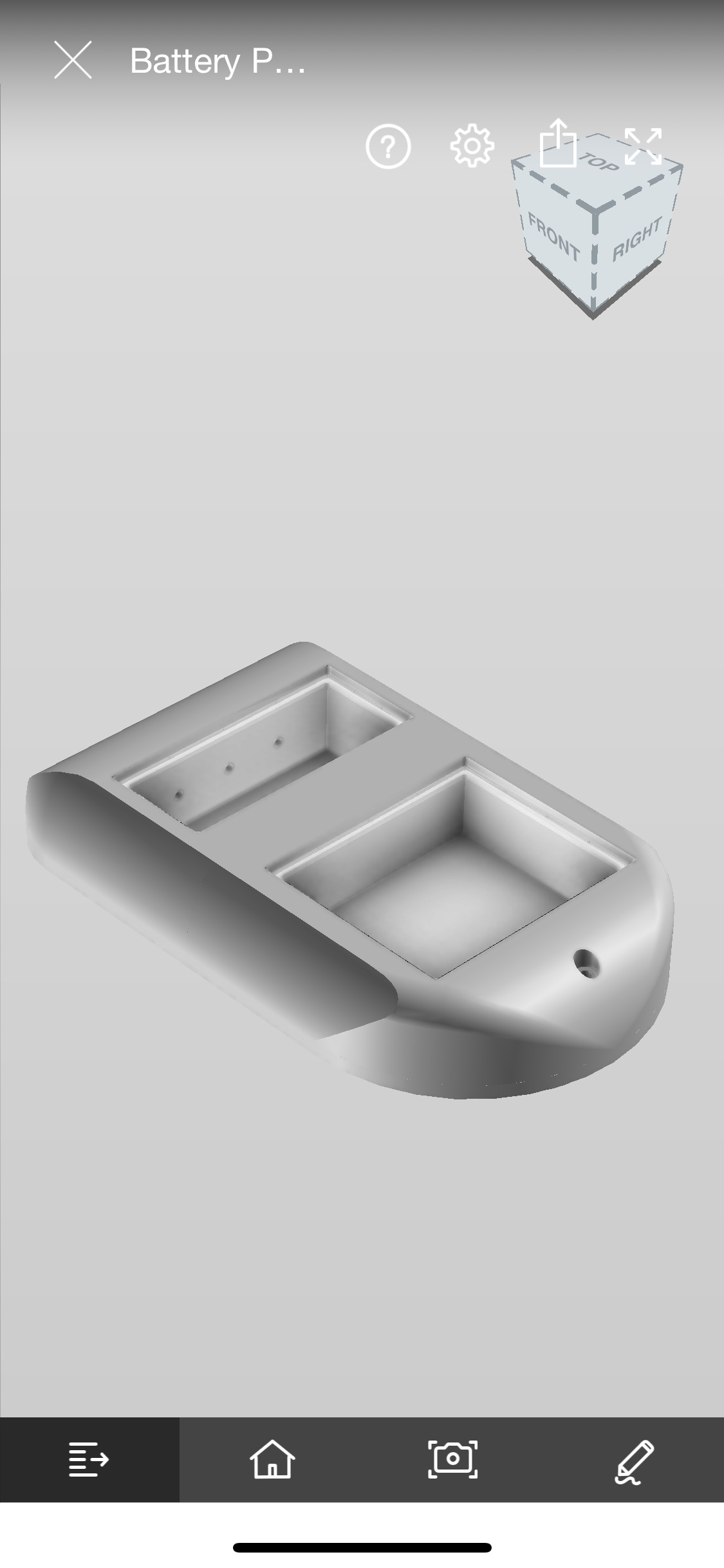
Awesome are you planning on releasing th stl files for it. I’m in the process of creating a battery dock and case. The dock will have the esc and receiver. The battery pack will essentially hold the lipo packs. I’ll release stl files once I’m done and happy with it.
@Dandydan Yes, as I love open source and others like pacificmeister are also releasing their files I will share the Fusion and STL files as well as a bill of materials once it is finished
I can recommend these Adafruit Feather clones, they are pretty small, have inbuilt 433 Mhz radio and LiPo charger, so not much more electronics needed for the remote.
Hi MaB
So I have my remote working…and used code similar to yours. There is a delay when I pull the trigger down(so magnet pulls away from the honeywell hall sensor).
It works but take a fews seconds to speed the motor up or slow down. Any ideas what this can be? I can post a video later…
thanks!
I can’t tell if this is really the problem, but MaB’s code has some things in it that could slow things down a bit. From my point of view there is no need for any acknowledgements, especially the manual handling of ack responses takes time and stalls the transmitter. Packets will get lost all the time and since there is nothing useful you could do in reaction to that, there is no need to know about it at all. The way RF24 is configured by default, it will resend the same throttle value up to 15 times, always with 1500us in between. Meanwhile the real throttle value can be completely different, so why resend the old one 15 times? Just don’t do it. Also you need to wait a whole roundtrip time, every time you send a throttle value because you have to wait for the ack. Meanwhile you could have already sent out a new value. Also there is no real benefit in lighting up an LED if there are no acks coming back - if the receiver doesn’t respond well to your transmitter you immediately feel that from the eFoil itself. So just remove all that ack related stuff and disable autoack.
Also there is no need to check the battery voltage every loop, your battery doesn’t die within a few microseconds, not even a few seconds. So it would be better to register a timer interrupt to a few seconds to check the battery voltage. Just keep the loop() as free and basic as you can.
Also try 1MBPS or 2MBPS instead of 250KBPS, which is the slowest. 250KBPS can also mess up the acknowledgements as they may time out due to slow transmission.
thanks Benjo! I will try these tips. I’m sure they will help. Right now its at least a second or two lag which will cause problems with slowing down or speeding up.
The other problem is the modulation is so tight. It super hard to find a medium speed…the motor wants to go full throttle or stop. I can get it to go half speed but the light touch that’s needed will be too hard in the water. Is there a way to dumb it down?..expand the modulation to its not full throttle until its 1cm away? I tried using smaller and smaller magnets. This did help but not enough. I was thinking the magnetic field was saturating the hall sensor but the small magnet I ended up using was pretty small(3mmdia x 3mm tall) so this might not be what’s happening.
Any thoughts?
Hey guys,
this is my first post on this forum.
First of all we are a group from germany working on our own e foil.
At the moment im working on the remote most of the time. And i thought this could be interresteing for some of the users.
It has a buld in wireless VA meter that shows the actual current voltage and the ECU temperature.
It also will show you the drawn ah as an indicator how long your battery will last.
The VA meter works fine and could measure up to 300A. Hope that i never see a current this high, because that means that there is something wrong
I already tested it with ECU and Motor on air. so the current was only about 2A, but it works very well.
I worked with potis and radial shaft sealings for trigger and trimmer.
I already tested it without any electronics in it and there was no leakage after a 12h waterbath in 30 cm depth.
The flat sealings are laser cutted, but you also can cut it with hands.
The housing is completely 3D printed and has only 4 parts.
I know that it is not a lightweight. But its not bigger than a good remote for RC cars.
If you guys are interested i will share the data once i finished and tested it. And yes i hope so.
Looks great Nibbler. Thanks for sharing. Fantastic features though smaller would be even better if possible. What motor, esc and gearbox are you using/
We are using seaking hv andsss 500kv an the modified nema 23 gear 5:1 with changed bearing shields. The gearbox is mounted directly on the motor bearing shield. 20180928_173846|690x388
At the moment it is assembled.
The gearbox is from a cheap stepper motor. It can handle the torque. But lets see if we get probelems with heat on higher rpm.
Idont know if so others are using the same gear. The biggest point about the nema is that the shaft seal needs to be removed. That reduces the produced heat a lot.