There is no trick, only a gearbox or a jet-like prop in combination with a 500Kv or so. 100Kv for this motor sounds odd.
Which ESC do you use for testing? You had 45V at 3500RPM with the 6384N at full throttle and 2000W power consumption? And you cannot reach higher power by varying the load?
At first if you only use one speedcontroller you might have a lot of issues with the current drawn (if ppl manage to blow a 120A ESC with one motor, you will definitely not be able to control the double amps, it is pretty hard to find a ESC capable of more than 100A conti. (APS has several but did you ever see the tests on ES? e.g. a 420A controller blowing at 90A after 10s: 420A 24S ESC by aliens | Endless Sphere DIY EV Forum).
So you might use 2 controllers, so you need an advanced controller with watt/current mode to get an equal power distribution. But still your motors will have the same KV. Sure you will get double the power and double the troque (you are drawing twice the amp) but you will not be able to use above 50% dutycycle because then you will be in the same RPM-Range as just using one single motor.
So what are your gains by parallel windings? Double the cost and?
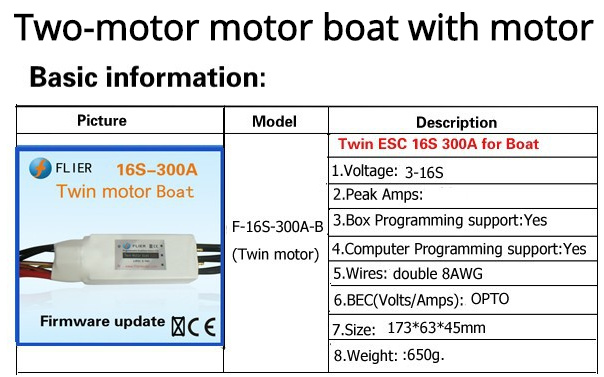
Okay, I am not able to find any tests on this model. The other Flier Twin ESCs are for car and skateboard where you definitely have 2 “independent” motors (at least you dont have to worry about syncing).
I doubt this thing will 1) Stand anything above 80A cont. and 2) it is able to sync 2 motors on connected shaft; But feel free to give it a shot and report your results.
Yeah 300A peak, did you see some conti. test of those Flier?
They are made for RC-Cars, which might pull 200A for some ms. Even on Ebikes they blow sometimes (e.g. when going uphill and demanding some amps over several seconds).
I don’t know any supplying more than 100A cont.
why not? Sure there will be more stress on the gearbox, but the idea is to replace the gearbox by a second motor, isn’t it?
The 300A is continuous, the motor is actually rated much higher-at 450A i have talked to them about this esc before, but I still think 300A would put to much strain on it, thus I feel it would handle 180-200A very well.
If two motors are not perfectly the same for winding, which why wont be as they are al hand wound in most cases the KV will be be off a little, also iif one motor get more or less power than another they will always be fighting each-other and something will eventually give and burn out, with potentially worse efficiency than expected. That is just my gutt feel.
This is the Flier 400A (according to theier tests tested for 200A cont. (they dont do more because their batterys do not supply more))
I dont think the 300A dual motor will hold more than that.
yeah, thats why you better use 2 controllers and watt/amp control (instead of dutycycle or rpm-control), so energy is split equally. @JTAG
What are your experiences? Did you go further than testing? Or ever tried serial connection of motor windings?
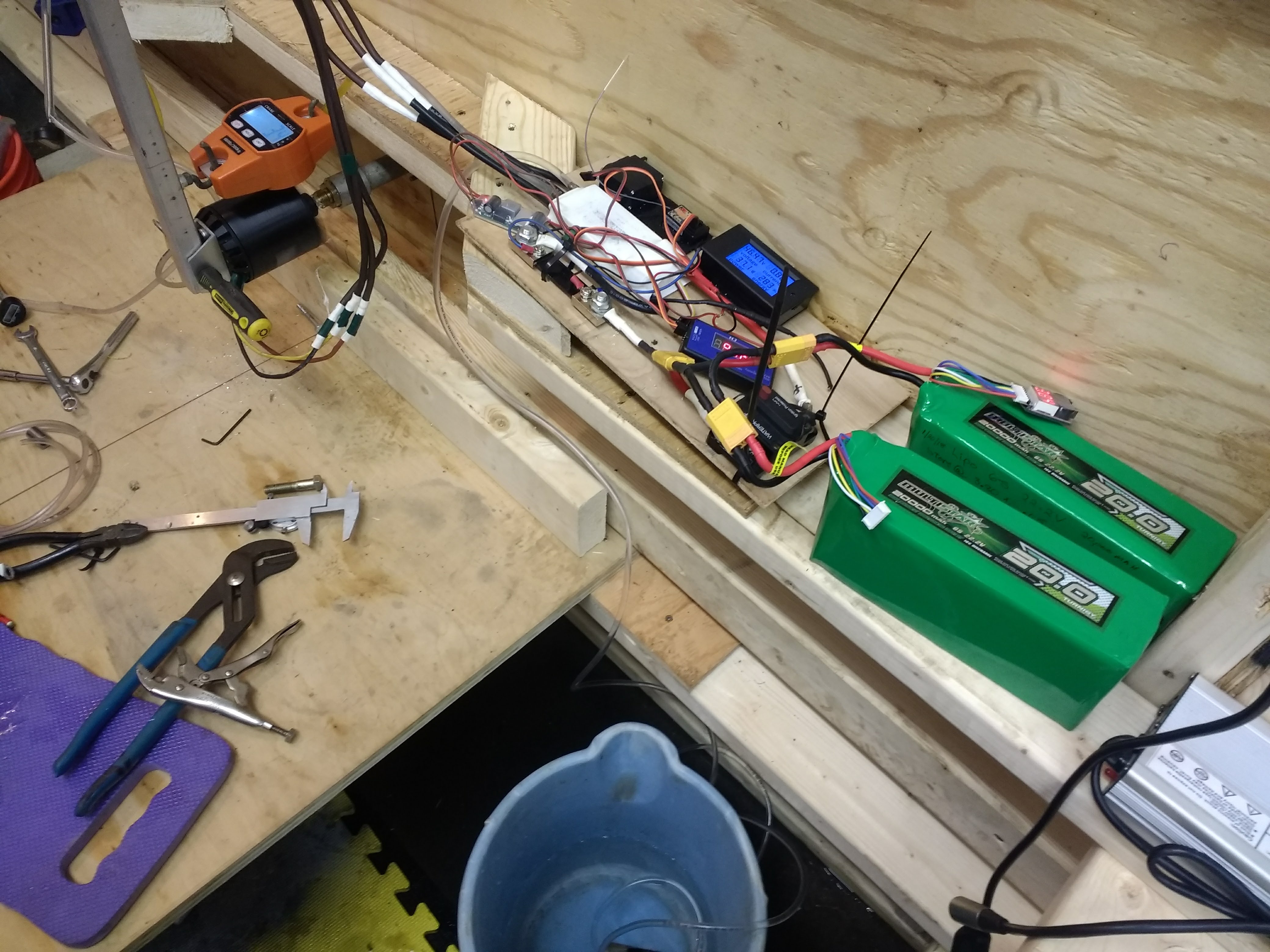
I’m having a problem. I’m stumped. My motor is an 83100 water cooled out-runner, 180KV sensor-less. My ESC is a 200/300 AMP Flier, water cooled. I’m running a Solas 7.25x 6” prop direct drive. My Battery is 2- 6S 20 Amp hour batteries in series (10C). Rather than using the remote transmitter and receiver I use an adjustable dial gizmo. It allows me to dial in a value and hold it accurately. My cooling water goes through the motor and the ESC. Its only about 50F in my garage. The cooling water temp is 43F in and 62F out. After about 3 minutes at 30 amps, 44 volts, 1630 rpms, 45 pounds of thrust, the motor stops dead. It does restart again in less than a minute. I believe the ESC is shutting down because it is getting hot. In some spots on the ESC I was able to measure temperature of 145F.
I noticed the 3 5 foot wires that run from the ESC to the motor are quite warm. They are #8 wire. The #10 wire that comes with the battery packs does not seem warm. Could it be the #8 wire I used has too high of resistance. Timing issue? Is 30 Amp continuous all I can really expect from a 200 AMP ESC? Help?
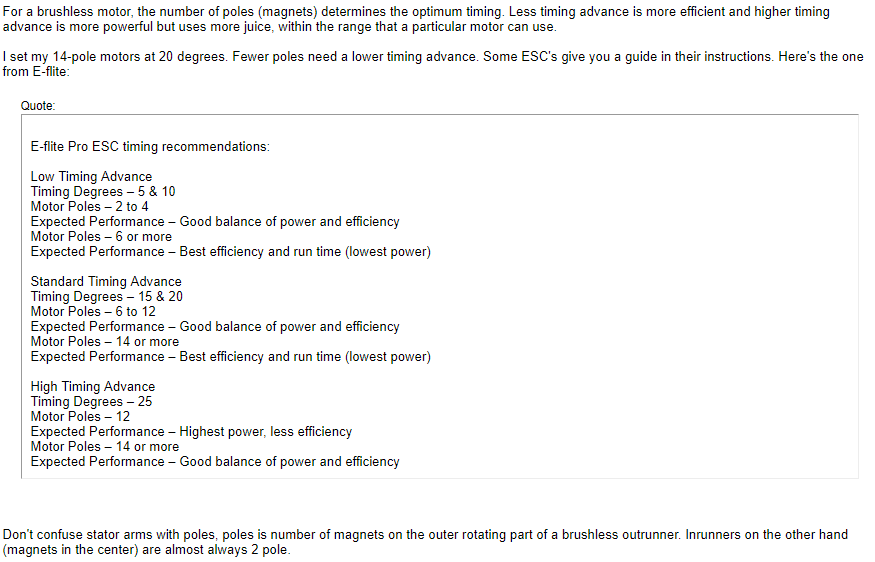
I found this while I was hunting for answers. I think I am still running at the default ESC Timing of 0 degrees. My out runner has 12 stator poles and 14 magnets. Maybe I need to change this value?
This pole setting is only necessary for heli mode. You can increase the timing. But it will not help.
You got a motor with 180Kv, thats the problem. You get 1630RPM at 44V and 30A ESC input current. With 180Kv and 44V you get a freerunning RPM of 7920RPM. At 1630RPM this means you have a dutycycle of approx. 21%. Means you drive the motor with as little as 9V. By this the input current is multiplied by almost 5 times, so you have a phase current of 150A.
To overcome this situation you have several possibilities:
Reduce the pitch and or diameter of your prop
Reduce the Kv, maybe you can rewind it yourself