Simple question- How do I save this Fusion 360 file? I have F360 on an Apple and a PC. Can’t figure it out on either one… 
that should work …
1 Like
Thank You,I got them printed out.
Hi mat, i tried to download your remote files from fusion360, they look great but it didn’t work. I guess they changed the account rules. If you could upload the files to thinginverse or somewhere, i’d be really grateful!
yes, fusion is really trying to get some money…
that should do it:
1 Like
Thanks Mat! Great work on the remote. I’l use/copy some of it.
ehrm… Is it possible to get step files uploaded? STL:s are kind of crappy to work with and i already used the free trial for Fusion360 
Also the stl seems like one piece, no sub parts?
Fusion stay free if you take a hobbyist license… only limitation is to be able to only edit 10 models at once.
with that you’ll be able to import the f3d file.
the STL was just for grabcad to have something to display.
OK, i did a new account so now it’s working. Had trouble getting the license, probably because my old account was eventually removed due to inactivity .
It’s a clever design, good work! How many iterations before you reached final design?
It seems that the throttle output in this design is 2.5V at resting position? Is this normal for ESC:s or do you translate it in the code?
1 Like
quite a few… I tested each part separately
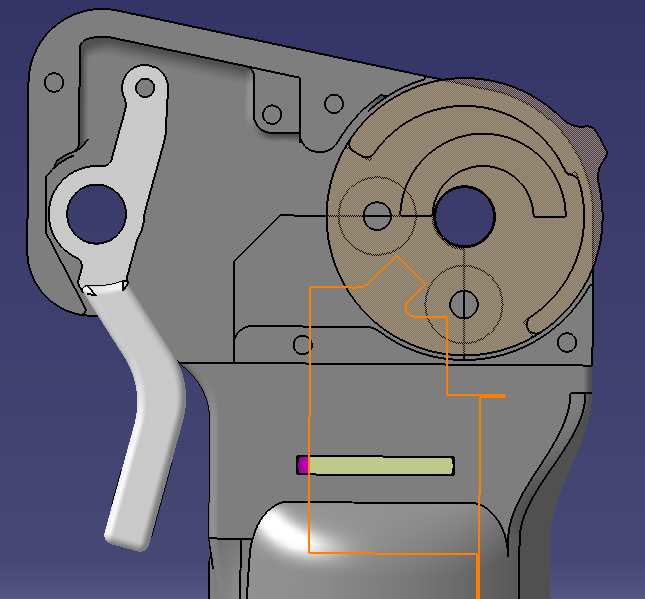
the way I was using it, the wheel is not directly giving the signal to the ESC,instead, the lever arm it, once you release it sets everything to 0.
The wheel either add or remove from the signal, so to start, you hold the lever and add with the wheel. once you fly, just release the wheel and the speed will be constant.
I did 3 modes in total: either the wheel up adds, either the wheel down adds or the lever controls the speed directly.
but in the end, I used only the 1st mode
OK, i see, so only half the stroke of the wheel is used. Wouldn’t it be an improvement with (somewhat) longer stroke?
nono, both sides are used…one side to accelerate, one side to slow down
it’s that part of the code:
wheel=analogRead(wpin); // 30 to 1000
if (mode==1){
wheelm=map(wheel,30, 1000, -10, 10);
vitesse = vitesse + wheelm;
Code is not my strong part but i think i understand.
when lever is pressed throttle starts from zero, then the up or down movement is accumulative adding or retracting to the throttle value. So there is a constant cruise control so to say if you don’t touch the wheel?
Could it start to drift if you leave the wheel untouched with lever activated or do you have some deadband value in the code?
it could drift depending on how the sensor is glued…
so once it’s all assembled and running, you’ll have to monitor what it’s doing in the serial monitor and adjust the center. mine was in the middle between 30 and 1000.
it’s pretty basic code to be honest, i didn’t knew arduino when i started it