I am having some very succesfull rides, and begining to learn to foil, though still on my knees.
I think I have topped my max speed now at 32 km/h, which is very acceptable. Nontheless I would like to know where my limit is, if it is the prop, batteries, VESC or other factors.
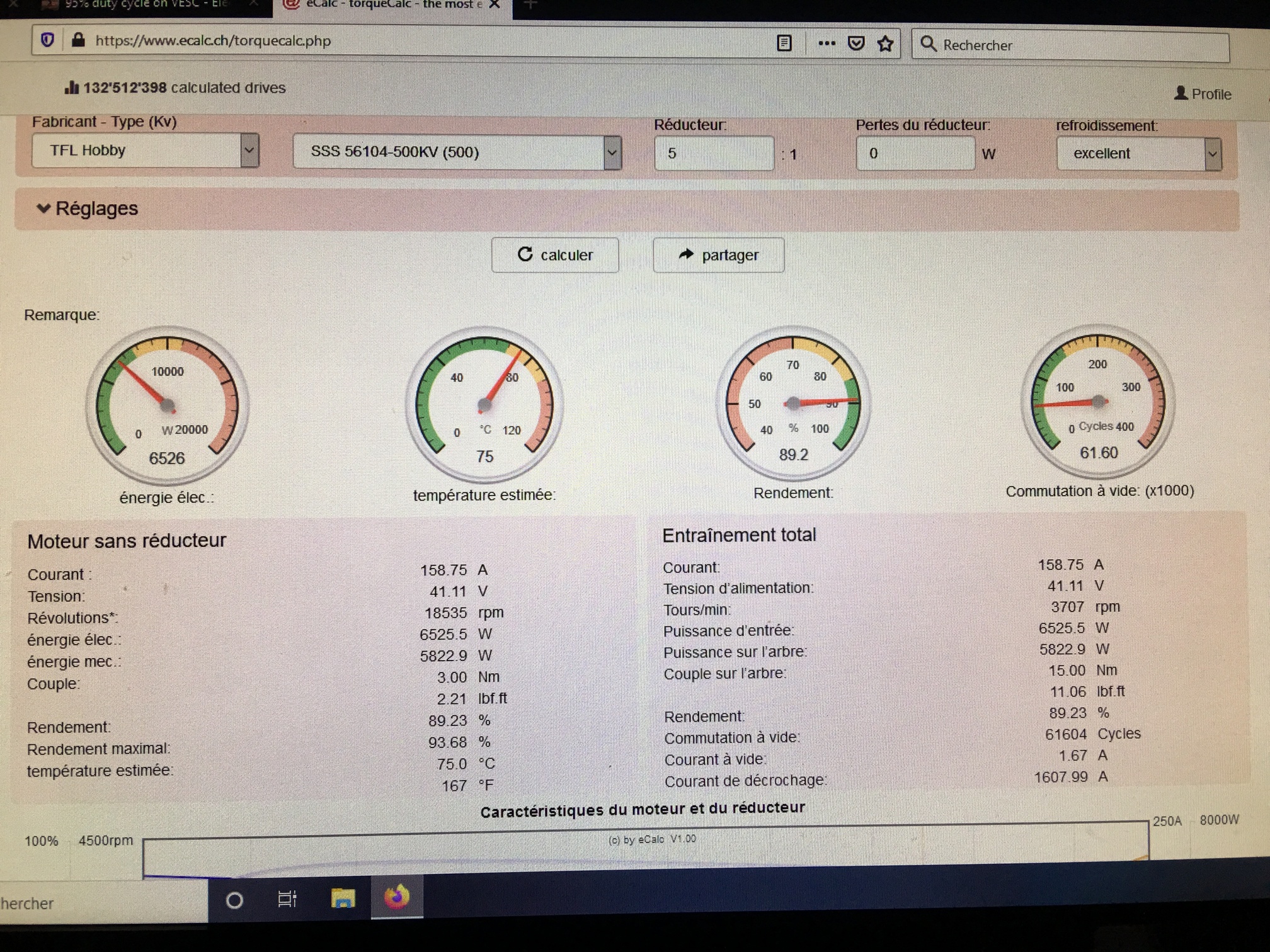
My setup is SSS56104 500kv/5:1 PLE, 200A Flipsky, FR proppeller, 12S Lipo 24Ah 10C.
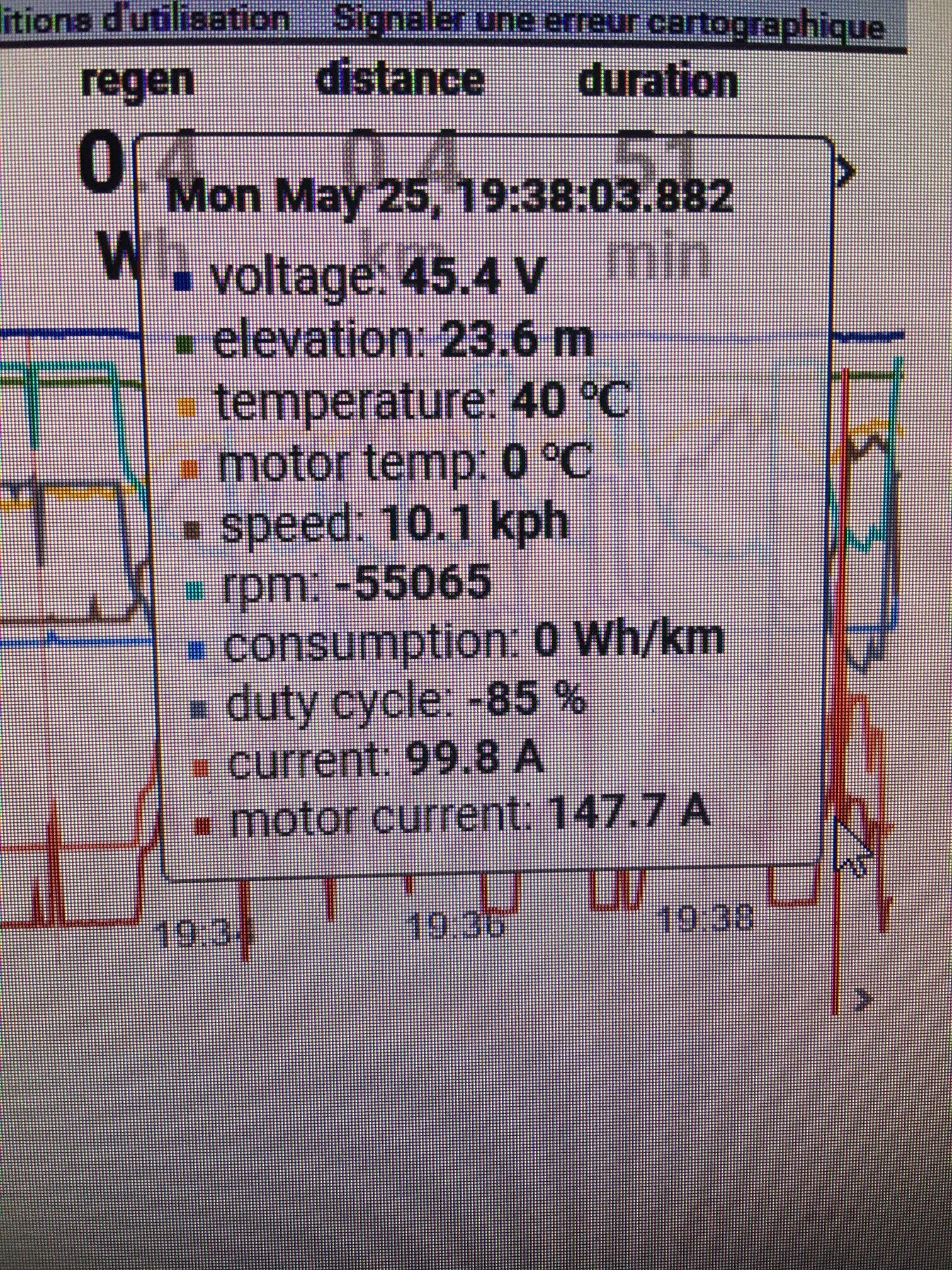
Below is a zoomed part of my ride this evening, aprox. 16 seconds with an average speed of 30 km/h. The avg. battery current is 36A, avg. motor current is 47A, avg. voltage 45V and avg. duty cycle is 93%. Duty cycle at 25 km/h is around 85%.
Why is my duty cycle so high, and my current so “low”. I set max current to 100A and max motor current 160A.
Thank you @Alexandre !! I am so amazed by this forum, to be able to ask a rather complex question in the evening and then the next morning a very comprehensive and thorough answer is replied. Im am very thankfull!
So from what you replied I concluded, that it is actually not a bad motor/prop combo I got, especially for a beginner like me (high torque at startup) and for speeds below 30 km/h.
If I want higher speeds down the line, I just get a motor with higher kv. Infact I have allready ordered a Flipsky 65161 120kv motor, which is on its way, incase my geared setup would failed. I guess this 120kv motor is the solution to my question to get higher speeds (not that it is necessary!)
Same behavior like I have with 100kv Flipsky motor. Max duty cycle and rpm, speed around 32km/h with FR prop. Boards rides nice, either higher kv motor for next season or different prop from FR (preferred option)
Great to know our results are similiar, though im running the geared pacificmeister motor. I will look forward to test the flipsky 120kv that is coming soon - will mount it on a second mast to I can switch between 100kv and 120kv for comparison.
Sorry but I think there is a problem with your formula
sss 500kv max 45k rpm but using only 45V battery. 45 x 500 = 22500rpm max
With the gear ratio 5:1, so the rpm reality will lower than 4500rpm
In this case, need to change gearbox to lower ratio such as 4:1 or using a bigger propeller.
*If my thoughts are right
I didn’t pay attention to the erpm to indicate real rpm because the esc can lose step(erpm) when mcu or electric component get fault, it will try a loop to keep the most normal mechanicle state.
@guldsteen
More torque = more acceleration.
More rpm = more speed.
The bldc motor torque directly proportional to the current. The Vesc foc control current too.
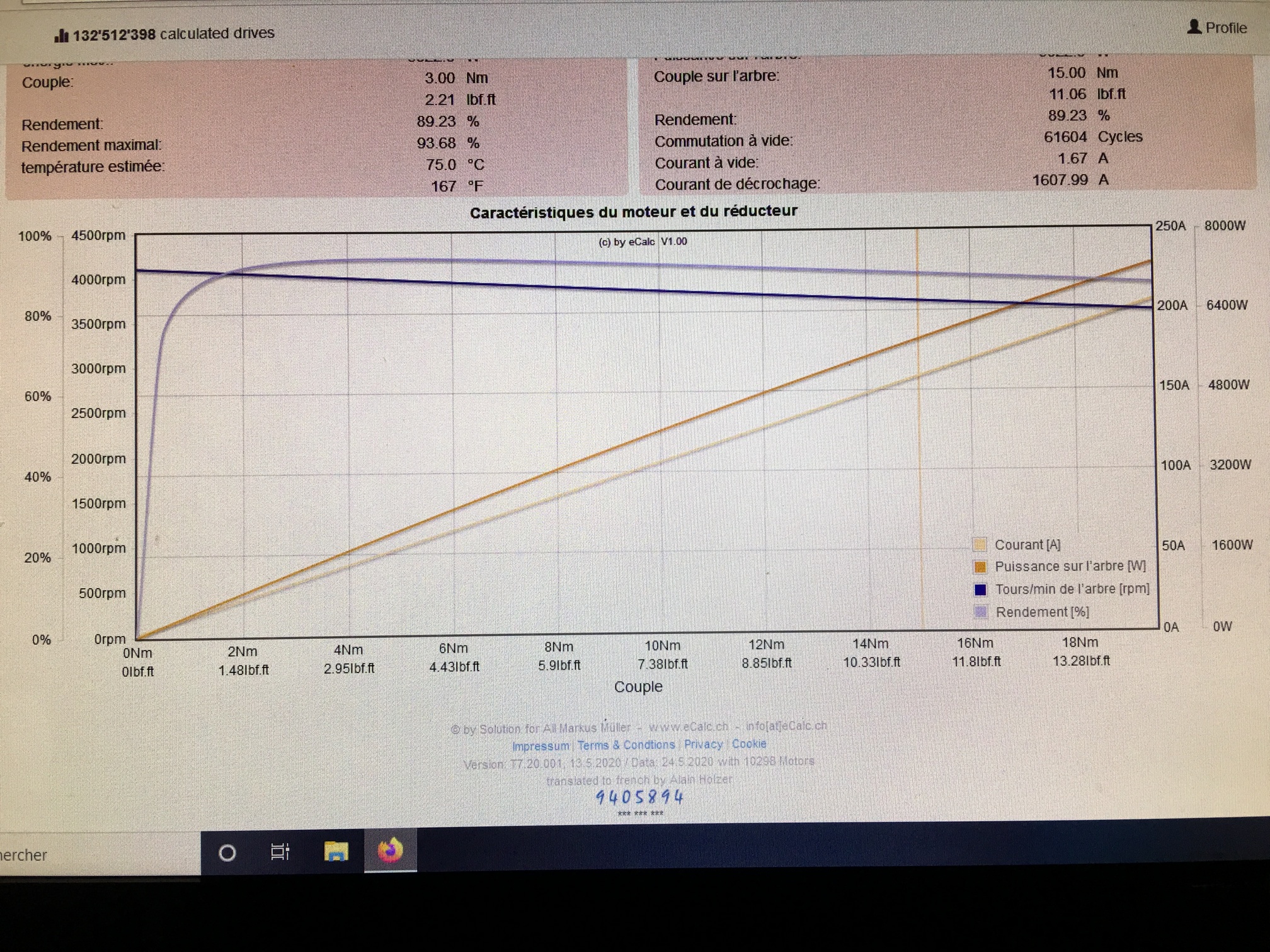
Ex: 10A ~ 3N.m, 20A ~ 4N.m,… 150A ~ 13N.m. I lost the sss motor performance chart image so i can’t post here.
Imagine when the current 150A, it’s will be 13x5 = 65N.m. At this point, you can see how much it waste energy if you keep that torque at high speed. But you will never reach that 150A Current at high speed because you’ve got the acceleration. That why the current in the logs is low when speed above 10kmph, but high at startup 0~10kmph, i can see it peak to 150A~ 7000 watt. The vesc was worked very good with the max motor current limit.
The speed and current couldn’t be higher by the limited of battery voltage, the “kv” of motor, gearbox and the propeller.
Increase propeller pitch can drain more current to get more torque & speed but at limited speed point it will get stall same as airplane aerodynamic, will decrease efficiency.
Suggestion of @Alexandre is the best way because will cost more $ to replace the parts
Im so amazed by all the info, Im learning so much! Got data below from a my ride this evening. The ride was more continuously and around 60% of time i was foiling, it was awesome!
At 19:58:48 the speed is avg. 30 kph over 10s with peak speed of 32 kph. ERPM is steady at 55000-56000, avg. motor current is 55A and avg. duty cycle is 92%. ESC stays at 42C with “passive” watercooling from the motorpod but without a pump - so simple.
Im very happy with this setup for now, though im looking forward to test the Flipsky 120kv motor with the same FR prop. I think I will stick with the FR prop, seems pretty optimal for the purpose.