I’m getting 10 of them made right now. If nothing goes wrong, no trade war, nothing is impounded by ICE, no workmanship defects, the assembler doesn’t substitute non-brand crap capacitors, I should have them in hand in about 3 weeks.
They are “public beta” status. I will be selling them with no heat sink for $240 + shipping. That’s less than my cost, but I think a fair price for an untested product. I’ll need feedback on what doesn’t work or what broke. For what it’s worth, they work just fine on the dyno, just not sure about the weird stuff that only happens in the real environment.
I’m working on a heat sink, in case people want something partially enclosed like the ARC200. That will cost extra.
Still not sure the final sale price for this design, probably $350, unless the magical promotional ad campaign fairy comes and makes a really cool promotional ad campaign for kickstarter and I can make them in batches of 1000.
This was with 7" prop. As you can see, the dutycycle is permanent at maximum of 95%. This week i am going to receive 300µohm shunts to avoid shutdowns by overcurrent. Than i will try with 8" prop again with higher current settings, so i hope to build up even more speed and power.
@Alexandre According to Benjamin Vedder, the motor current reported by the VESC is the current used to create the magnetic field. It’s something that comes out of the math guts of the FOC algorithm, and it seems to be pretty close to the sinusoid peak for each phase.
I think about it like this: in a DC load, the voltage all drops across the load as work. Each electron delivers ALL of its potential energy to the load. High pressure on the input side, low pressure on the output side, and the current flow is directly proportional to the load.
In a BLDC motor, the motor creates most of it’s own voltage by spinning, so there isn’t a huge pressure drop from electrons slamming into a wall and losing all their energy. Each electron can only transfer energy equal to the difference between the input voltage (pwm duty x battery) and the motor rpm (motor rpm x kV). Instead, larger numbers of electrons will flow, each doing relatively little work.
So maybe think about the controller as a small accumulator tank: A few high energy electrons slam into the tank from the battery, and large numbers of low energy electrons flow out into the motor. Even when the duty cycle is 100%. That’s about as good as I can understand the physics.
For power analysis, the “Motor current” measurement is useless, unless you know the efficiency of the controller and the power factor of the motor, which is probably dependent on RPM and torque. But I think it does tell you something about how much relative torque you are putting into the motor, and it does tell you if you are exceeding the motor current specification.
It is an interesting plot, as you can see we got overvoltage failure at 18:15:07 , when i triggered the main switch, so the battery is disconnnected in ground path. At 18:15:53 s we have overcurrent reached, the typical announcement of the vesc, when you go too steep.
Thank you , i am new with the foc mode which i will run this year… Didn’t think about this amp"pics" of the motor…
As i was thinking to get the power used by the motor close to the power of the battery in order to stay around a nice torque/trust area ( bigger propeller data will be interesting )
Missing the rpm value on the data for calculating the torque value …
I am trying to get my way around the numbers in order to estimated the best combo pitch/diameter/rpm for my needs
The metr.at tool is just incredible. Therefore, a few questions
1 - Is there another tool on the market that aggregates speed with the real time consumption data (Voltage, current (battery)
2 - can we get instantaneous consumption in WH not averaged (smoothed) on a distance we don’t really know how it has been calculated ? My guestimate would be that the speed is calculated from the derivative of the distance travelled over the last 1 or 2 seconds (from GPS data) which would mean it is the quasi real time speed and consumption which would be a gift.
To compare prop efficiency, we could create a set of indicators:
I propose this first one:
SPUP : Speed Per Unit of Power: kmph reached per consumed power unit (or WH)
= speed (kph) / [ Voltage (V) x Current (Amp)]
Conditions: at identical duty cycles (DC) (could be linearised by a rule of threes even if I am not sure a motor reacts in a linear way)
That’s where the Maytech remote is helpful: 33% DC, 66% DC…
If it is demonstrated that the motor power and Duty Cycle are proportional therefore linear, I propose the SPUP-L
SPUP-L : Linearised Speed Per Unit of Power: kmph reached per consumed power unit (or WH) at any duty cycle.
= speed (kph) x Duty Cycle (%) / [ Voltage (V) x Current (Amp)]
Conditions: none = at any duty cycles (DC)
Xmatic app is worth the try , more worried about the fw update for the new vesc 75/300…
I have set my remote with 2 modes 80 and 100% , will see i just need to finish my board …
So today i drove again with 8" pitch. And it was a hard game. I returned to the pier and other places on land 6 or more times to figure out what was recorded by the metr app and adapted the values by it as well.
I activated High current sampling mode and Sample in V0 and V7
I set Current filter constant to 0 Motor current 110A Battery current 100A
Control Type Duty Cycle no reverse
I think the current filter was the most important thing.
I still had once ABS HW Overcurrent in the beginning, i think i should also increase the Positive Ramping Time.
I forgot to mention the Stator Saturation Compensation i set to 0.1 , could be also important.
So this is the result:
If you have further suggestions how i can increase the performance of the VESC please let me know.
This is recorded using a large windsurfboard without any wing. It has of cause much higher power demand than any Efoil. As you can see, the 6384PG and Nicks VESC can hold the power up for a long time at a high duty cycle. The metr saved my day, because you can adapt every parameter the VESC Tool shows directly via the app in your smart phone.
Measuring current in V0 and V7 means: There are 3 sets of switches, and VESC tags each state the 3 switches can have as V0-V7. V0 is all OFF, V7 is all ON. VESC FOC uses bipolar mode switching, so the switches are all V0 (OFF) once per switching cycle, at the switching frequency. This is when vesc 4 measures freewheeling current through the low side switches. But if you have phase shunts, you can also measure current when all the switches are ON, this is period V7. Measuring current in V0 and V7 means you measure current 2x per switching cycle, which is 2x the control frequency. More data means better control.
Ok , i am still in testing mode Foc , just 5% gain in amp using high frequency 30 instead 15 for my 3 poles motor , v0 v1 didn’t change anything but i did not understood that was just for sampling …
These current rails are copper wire with 3.25mm diameter , AWG8
I would like to add battery cables to the middle of the current rail, additionally to the ones you see on the picture in parallel and solder them all together into the XT90 plug going to the relais. That would be two times AWG10 then. I found my battery has inner resistance of 27mOhm by the measured voltage sag from metr VESC data. I will also use no shunt for the battery gauge any more but rely on VESC data recording to my mobile which i mount on my box. The rest of the battery cabling i will redo with 10mm^2. On the motor side i will continue with AWG10, a 3 phase cable sold to me as 3x6mm^2 ,hahaha.
If you have more advice, please let me know.
Nick, could you compile a new FW for the 0.3mOhm shunts for me please?
There is not much power missing, maybe 10% more would be a pleasure, and no more HW ABS OC.
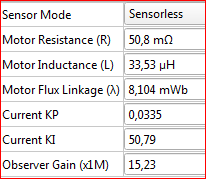
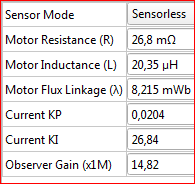
Just ran the motor detection:
you can find the corresponding pic for the 0.5mOhm in this thread at 3. April 2019 .
So the new shunts might have even little less the 0.3mOhm or the old shunts had little more than 0.5mOhm.
Lets see
Vesc always shows the resistance of one phase in a Wye configuration, thats 27mOhms. But this is not the resistance of the motor alone, i have cables and plugs and connections. I use 3 phase cable with the above mentioned AWG10 with a length of 2,7m, that makes 9-10mOhms per phase.
So we get 17mOhms for each motorphase. This fits also my initial testing with old Vesc4 with short leads.
I have a (hopefully sinus) peak current of 110A tested for 14 minutes.
I would estimate the ohmic losses by 110/sqrt(2), which makes 77A RMS, square this and multiply with 34mOhm, so 205W ohmic losses. Please correct me if this approach is wrong or too simple.
There are other losses of cause, like hysteresis of iron and so forth, but they might not contribute to the hot spot of the winding temperature, because they are cooled by the water at the stator. Same goes for the friction losses. So overall losses at full speed full load i would estimate 400-500W.
Perfect performance. 95% dutycycle all the time. But the rest of my system is at its limits. Some PLA parts inside battery box are deformed now, especially around the motor cables and connectors. It was a good idea to make a pause in the middle of my trip to Frankfurt downtown.
In the end, after opening the box, the cables were hotter than the batteries.
Its so much fun, there were a lot of waves, i overtook a freighter and i did not fall! The third day in order!
 )
)