for my foil assist setup I have the motor mounted about 20cm below the board.
I’m using a 3 blade folding prop from Foil Drive and the other hardware is a Flipsky 75100 VESC, 10s battery, Saite 6384 motor.
After riding a wave, I usually stay on foil and ride back out with the prop going in and out of the water. When the prop goes in and out of the water while riding, it’s not a very smooth ride due to sudden thrust when it enters the water, prop ventilation etc.
Any recommendations which VESC settings to adjust to make it as smooth as possible?
Try to limit power as well as ERPM as close to the maximum you actually need. Especially ERPM helps in my experience to make the prop go back in the water smoothly.
Thanks both, I limited ERPM to 25000 and reduced the max motor current to 90A which already helped quite a bit.
I think I can further decrease the ERPM since the VESC log shows that regular riding (without prop breach) the ERPM stays below 20000.
The “ERPM Limit Start” setting looks interesting too:
According to the description text, it could be used to soften the ERPM limit, which sounds like it could smoothen things out on the top end. Thoughts?
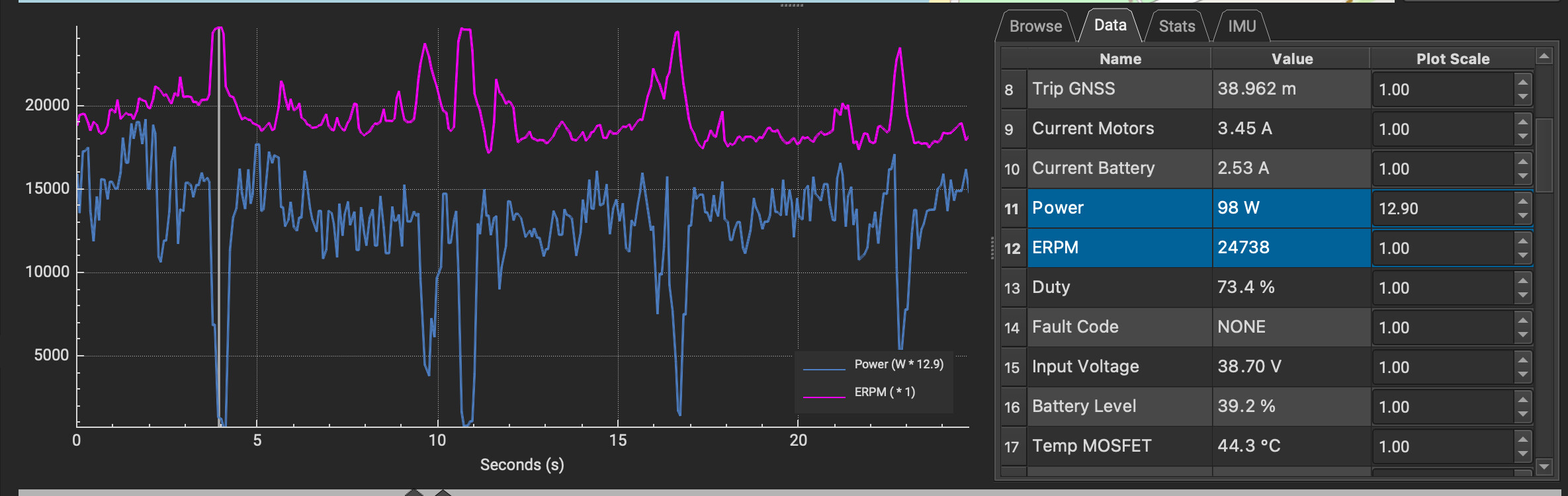
Here’s a VESC log visualizing the ERPM and Power where you can clearly see when the prop ventilated because the ERPM spikes and the Power (Watts) is going way down:
Assuming there’s no really solid way to solve the prop ventilation issue with VESC settings, do you think it would be feasible to solve the issue with a custom VESC LispBM script that prevents ERPM increases if current draw decreases?
I got also 6384 motor and set my ERPM to 18000 for that particular reason. This is on 13s setup. I also got a limiter on my controller set to 60% power. My motor max is 70A. Works great on big board and big wing.
My ERPM Limit Start is also on 80% and I think this is ok for me.
When going small wing I go with no limiter as need extra power. But then it is way more difficult to keep the pitch stable when motors goes in and out of the water.
There is also option to adjust power ramp up on VESC profiles. I have not played with it but it might also help by adjusting to deliver extra power more gradually when props hit the water.
I’ll try out speed/rpm control when I got some time.
I consulted ChatGPT about it and it claims it’s not a good idea. Quote: “Using RPM (speed) control instead of current control is usually a bad idea for foil-assist because when the prop ventilates and then re-enters the water, the RPM controller aggressively demands torque to correct speed error, causing hard thrust spikes and unstable behavior, whereas current (torque) control naturally bounds those forces.”
I tried Duty Cycle control a few days ago (thanks Jürgen for the suggestion). It seemed to smoothen things out a bit, but felt like less power available when trying to get up on foil for some reason. Because of that I went back to current control.
I’m currently using Current Control and gradually decreasing the RPM limit each session until I find the perfect value. I currently have it set at 21000 ERPM and its much smoother now.
But that is bullcrap. There is no significant speed error if the controller tuning is decently quick…
It is just that would be the feature with speed control, motor RPM would not skyrocket when propeller is running in air. With current control thats what happens without rpm limits.
But I only got a masters degree in control engineering, so I might be completly off, lol