Hi,
just trying to build my first remote, how much value for 12s battery pack in the upload for remote?
Depends on the voltage you consider “full” and “empty”?
I would consider <36V empty and >48V full
So you need to put 360 and 480 in the code
Can anyone tell me what LO and E4 faults are on remote ?
L0 = Level 0 (out of 9)
E4 = no connection to Rx
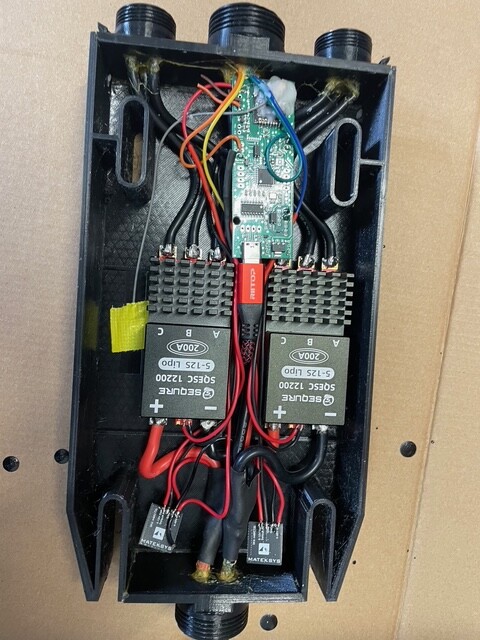
I have the following issue on bremote v1.
I have the second pwm signal on AUX1 and it sometime goes crazy and stops my ESC.
see:

std output (blue line, 100% stable):

bremote v1 second pwm signal on aux1 (yellow line):

setup:
It looks like AUX1 is sometimes skipping a signal.
It does mainly happen when I to steer.
When I don’t touch steering it works close to stable.
@ludwig_bre do you have a idea?
Do you get any signal interruptions? Like E4 error?
The signal for the 2nd ESC is created in the interrupt routine of the RF Module… so this is not a very stable source. Usually ESCs can handle a few dropped pulses. Can you maybe set a failsafe time in the ESC configuration? If so, set it to 0.5 or 1 second
no E4 error at all.
The sequre ESC is based on BLHeli. config is:

I am wondering that nobody else had this issue yet.
I will check tomorrow again.
It mainly happens when I try to steer.
When I don’t touch steering it works close to stable.
Any idea for that?
Maybe changing the acceleration from maximum to some other (lower) value will help? Or maybe disable non damped mode? Just thinking maybe the signal jumps a bit and triggers some over current error?
Have you tried to temporarily move the receiver away from the motor cables?
The electromagnetic environment just near those cables is quite wild and can easily interfere with the receiver. @ludwig_bre can probably tell how well filtered the electronics are but I think it can be a good thing to try out.
1 Like
Hi Everyone,
For those of you who have used the Bremote v1 for a tow boogie with differential steering, can you let me know what values you decided to set the STEER_TOG_DIFF and STEER_DEADZONE in the Tx for suitable steering sensitivity.
I’m using two 6384 motors and was keen to hear experiences of others. Perhaps you stuck to the default. This would also be good to know.
Thanks,
James
STEER_TOG_DIFF basically sets the limits of how far you can push the toggle button until max steering is reached
STEER_DEADZONE just cuts away the middle as the toggle does not perfectly return to center
Both of those values should be rather constant for the BREmote in its original housing and only changed for another case / mech. assy / magnet type
If you want to control the amount a given steering command changes the motors rotation, you need to change #define STEER_MULTIPLIER 2 or #define STEER_AMOUNT 1 in the Rx.h
If Steer_Amount of 1 is still too much you may need to change the actual code in “Communication.h” of the Rx
#ifdef DIFF_STEERING_ENABLED
//Subtract from first motor
if(rx_arr[3] > 127)
{
uint16_t ppmTimeModifier = ((uint16_t)rx_arr[3] - 127) * STEER_AMOUNT;
if(ppmTime > ppmTimeModifier)
{
if(ppmTime >= 0)
{
ppmTime -= ppmTimeModifier;
}
else
{
ppmTimeSecond += ppmTimeModifier;
}
}
else
{
ppmTime = 0;
}
}
//Subtract from 2nd motor
if(rx_arr[3] < 127)
{
uint16_t ppmTimeModifier = (127- (uint16_t)rx_arr[3]) * STEER_AMOUNT;
if(ppmTimeSecond > ppmTimeModifier)
{
if(ppmTimeSecond >= 0)
{
ppmTimeSecond -= ppmTimeModifier;
}
else
{
ppmTime += ppmTimeModifier;
}
}
else
{
ppmTimeSecond = 0;
}
}
secondThrottleTime = (OCR1A_MID + (ppmTimeSecond<<OCR1A_MULTIPLIER))/2;
#endif
OCR1A = OCR1A_MID + (ppmTime<<OCR1A_MULTIPLIER);
}
radio.writeAckPayload(1, &payload_arr, sizeof(payload_arr));
After the line
uint16_t ppmTimeModifier = (127- (uint16_t)rx_arr[3]) * STEER_AMOUNT;
you may wanna add a
ppmTimeModifier = ppmTimeModifier / 2;
to make the steering influence half as much
Please note that this line occurs twice, so you need to do the change in both spots (line 94 and 114)
3 Likes
Thanks Ludwig. That is some really useful information right there ![]()
1 Like
I have a dual motor Bremote setup with 2x BEC, and I’m having some issues with my right (Starboard) motor losing power after about 20 seconds being on foil. I also find that after surfing a long wave and I’m the marginal zone for signal back to where I left my boogie, that the same motor won’t get power when the other is fine, so it goes in circles until I paddle closer to it. That motor that loses power is connected to the 10k resistor side of the Rx. This happens more frequently when battery is below 50%. Is there anyway I can troubleshoot this? I’ve ordered the V2 Bremote with external antenna, so perhaps that will solve all my problems and I should just be patient!?! ![]()
1 Like
If you have intermittent connection, the PWM signal generation for the 2nd motor is also intermittent, while the 1st (original output) is smooth and constant until the failsafe sets in. Probably this behavior upsets your ESC in some way. What you can try is to put the throttle all the way to 0 and wait a bit, maybe even steer to the starboard side (make sure it gets 0 throttle)…
Other than that maybe some changes to the PWM timing on ESC side or Rx side could also help
Thanks, yes leaving with no throttle for a few seconds does ‘reset’ it back to normal, but sometimes those few seconds are enough to come off the foil or for me to end up ahead of the boogie. I’ll see what I can try in BLHeli32 for PWM timing.
Hi,
I have a lot of play in the trigger handle.
It moves about 2mm in and out.
It is still working but …
Is it possible to remove just one side of the main body to replace the mag rod?
Or do You have other ideas/hints?
Thanks
Stefan



So I missed reading through this thread before building my V1 LR and the issue with antenna when foaming.
I get a persistent E4 error but most of the time even though error is shown it connects and works. In a tow boogie session I maybe have connectivity issues 1-2 times after a wipeout.
I’m connected to a flipsky 75200 v2 pro and it doesn’t either show battery or temps.
I’m trying to figure out if it’s a bad connection in the tx that’s causing the E4 and if I should attempt the surgery or just leave as is (since it kinda works). Anyone experienced something similar?