Hello all,
My friends call me Kipper. For over a year now I have been reading these forums on building. I have learned a lot and have taken many notes. About six months ago I started something I personally love to do, create a parts list for a project and long story short, I was not satisfied with the motor options available. The one I wanted was out of my price range, and all other cheaper options did not compare. Now I had dealt with Chinese manufactures before in my other online business. For this business I have custom components machined in china to my drawings (I have a mechanical engineering background). I watched many posts die and fail about “custom motors specifically for hydrofoils” on this site but I was sure I could do better. I did not. No manufacturers I found could give me new information on motors, or seem to be able to control how they were made.
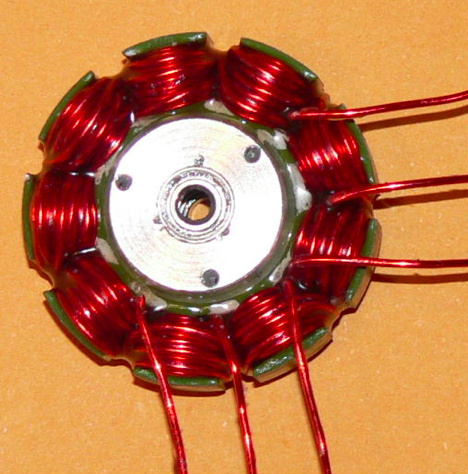
So it was back to the drawing board. Crazy idea, I’ll just build the motors myself. And that’s where I am today. So I make no promises because I have done no real world testing or have every built a motor before. But I have easily spent well over a thousand hours researching brushless DC motor theory, construction, material specifications, magnets, magnet wire, and the list could go on forever. I have completed magnetic motor software simulations on my design and feel confident in the results. This software provides me with the motor losses in watts, torque, and other data based on my given stator, rotor, and magnet geometry plus number of windings and direction. I have settled on a 9 stator 8 magnet design.
The obsession with building an electric hydrofoil and flying is still with me despite this bump I created in the road for myself. And this may seem like a round about way to get there. But from my perspective I am young, ambitious, I have an entrepreneurial spirit, I have a love for water sports, and I like the idea of making this sport a hobby as well as a career. If I can sell something cheaper and better than everyone else I am going to do it. And it is looking so far that dream is feasible. This is what has led me down this side path of building my efoil. I saw a market, and I am going to attempt to take it.
I have already had sample rotors and stators delivered to my house, have a copper polyamide magnet wire sample pack on hand to try different windings, and my custom N45SH magnets are on order and should be here by the end of the month. I understand there is probably going to be a lot of headaches I do not foresee coming down the road. However I feel ready for these challenges.
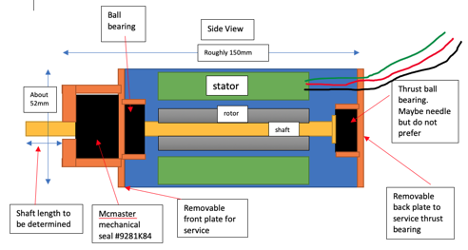
Now, this is the point where my lack of real world knowledge hurts me and I am asking for everyone’s help. I am currently designing and looking to have made shortly the actual motor housing. This requires bearing and seal selection. Who better to ask then the people who have some efoils on what works and what doesn’t? Also what is the preferred shaft length and diameter to attach propellers to? I know these questions have been asked before. But this is a little different we can dream up anything we want together.
Let me know what you think.
Thanks!
-Kipper