Hello everyone! I’ve been quietly going through pretty much every thread on the site now while planning my build. Pretty amazing how much knowledge one can find.
Since I like giving myself a challenge and have the access to all necessary equipment I plan to build all parts from scratch. So Board will be CNCed core and laminated, the strut, fuselage and wings will (most likely) be printed and wrapped in carbon etc etc. I have a ton of experience in manufacturing metal parts and have been around a lot of carbon processing but never got my own hands into it (which is how the project initially started out).
First decisions already made are:
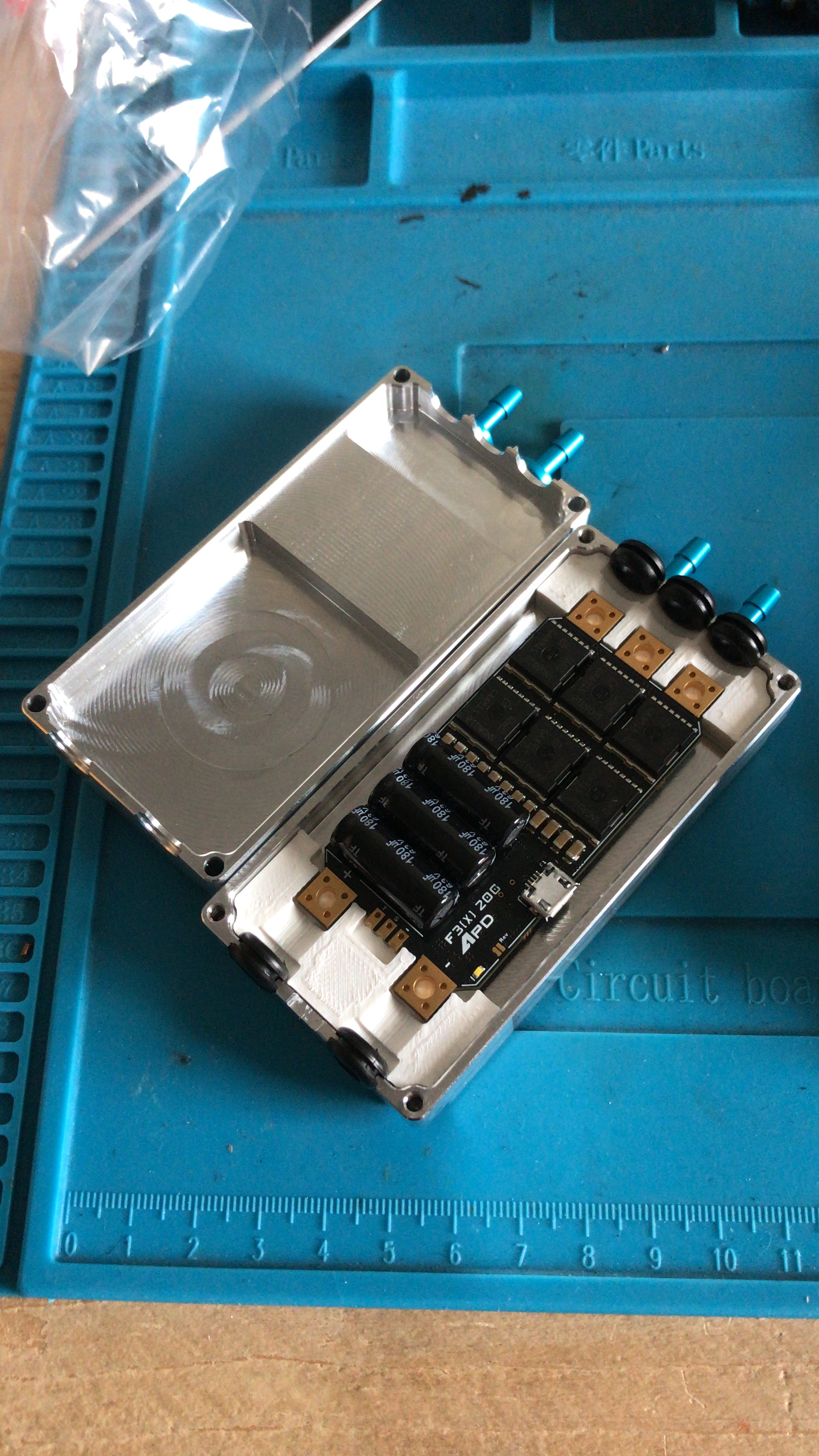
ESC: A200s V2 VESC (designed by team triforce in the UK) that I used the open source designs (with consent of course) and had manufactured for a fantastic price. Good for 18s and high current so more than powerful enough!
I will be running tests (I have a bunch of friends at the Delft solar boat team and they have kindly allowed me to use their motor test equipment) and making a waterproof casing (with water-cooling?). If I am happy with all the testing and their is interest this can be made available for the community.
Batteries: 10AH 6s hobbyking packs that I have have a bunch left from a previous venture
Board: Custom
Strut and foil: https://grabcad.com/library/kitefoil-hydrofoil-1/details?folder_id=2902073 but I will make changes so the front wing can be replaced with different ones which will also be printed and wrapped in carbon
The motor is something I am really unsure about and it determines some of the other design choices. I have made a design with a motor mounted in the deck with a shaft going down the strut and a bevel gear set. I actually have the gears on order since they were so cheap (just anglegrinder spare parts from china). This is the most hydrodynamical approach (Solarboat does the same thing and it works like a charm) but it’s really tricky to get right.
I have also modified the strut design above to include an integrated POD for a 80100 direct drive design - this seems the easy and cheapest course of action but I would like a more efficient design (keep telling myself this isn’t the best way to go). I’m also not to keen on the epoxy on a lathe procedure.
I have also considered the 70131 motor from freerchobby but there is little to no info about it and I don’t really want to take the risk.
The last is going with the SSS 56114 motor with a gearbox like a lot of successful builds here. The only spin on this is that I would use a reasonably unconventional gearbox to reduce cost. I’m looking at one from a large scale RC model which seems to have the right RPM rating just slightly lower power rating. But since the gearbox is designed with large teeth and RC cars (constantly slamming throttle from standstill) in mind I think it should be plenty robust to transfer the torque. I can’t find a picture of the gearbox fully assembled so leaving that out for now. It would require some mods but nothing I can’t fix on a CNC. Cost is roughly 35 euros for all the parts (bought as separate spares) and would need some interface parts printed/machined to be suitable. Going down this path I would consider either having a POD (like everyone else) or integrating everything into the fuselage. I still need to work up the CAD since I only recently found this option and there are no resources for the gearbox online.
The last is my preferred option since I’m interested in testing that gearbox and it seems more efficient than the outrunner.
Your input on the motor choice would definitely help out.
Since I haven’t actually built anything yet here are some of the designs I mentioned up here in CAD for those interested. The designs are a mix and match of available CAD from here and other online resources with my spin on them.
Direct drive pod:
Bevel drive torquetube:
Edit:
Found a video showing that planetary. It’s pretty similar to ones from a gearbox by the looks of things.