Oups old post…
Update!
@Alexandre thanks for the input, doesn’t matter that its an old post ![]() , keep it alive.
, keep it alive.
This setup didn’t work, the esc would lose sync with the motors when the torque got to high or the ‘slip’ on the motor increased, no matter what I did with the timing, I think a VESC would have been able to keep timing. This caused one of the motors to fry.
Didn’t stop there…
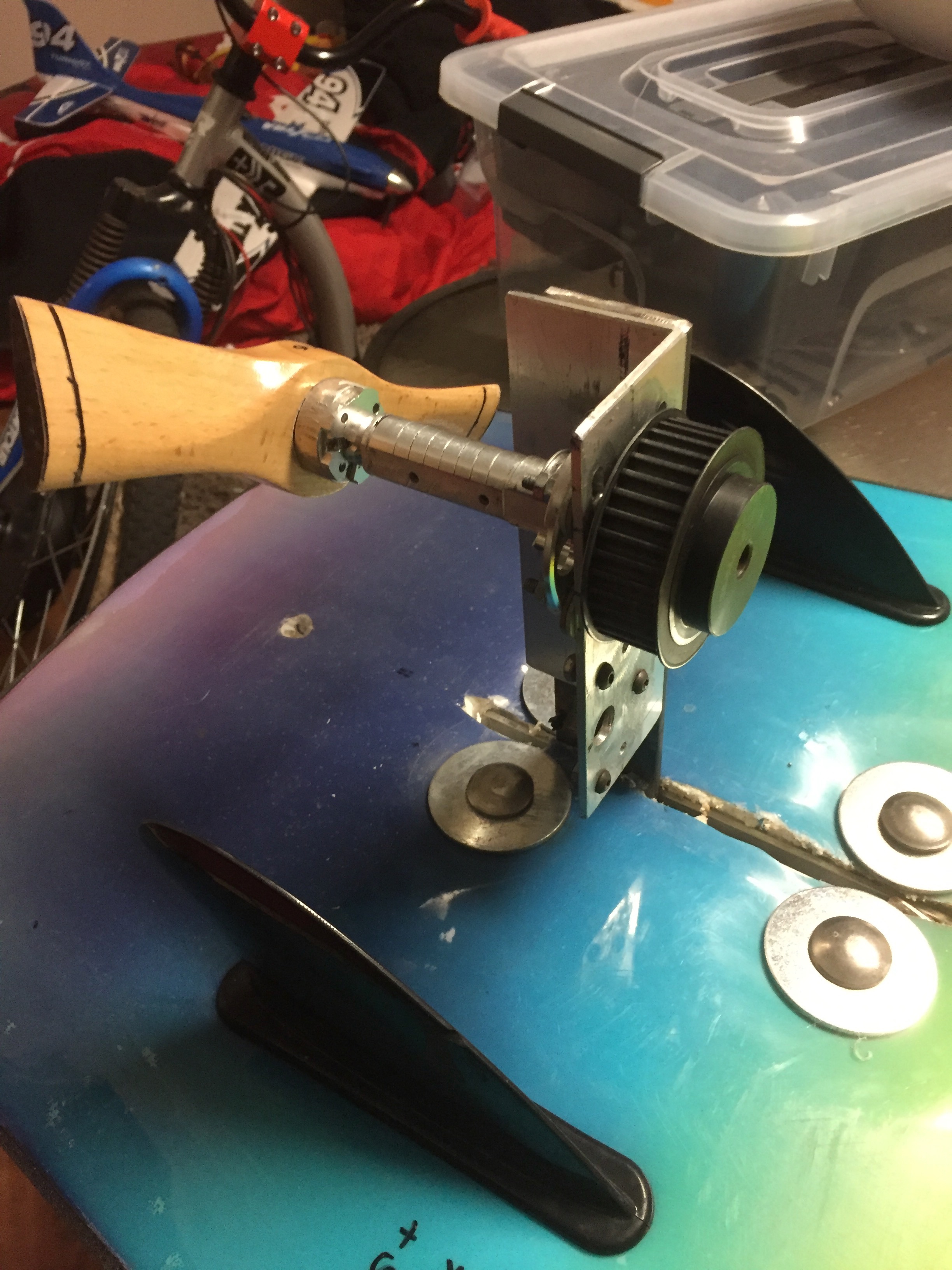
I ended up making a 2.5:1 belt reduction with the one 6364 motor I had left, the belt fully submerged.
I didn’t get a photo with the belt on while the drive was assembled, but this gives you an idea what it was like. I used an internal shaft/bearing of an old turnigy 6374 motor as the propeller bearing and then attached the pulley to the 8mm shaft, it worked quiet well, just for the test, this definitely was not intended to be a long term solution…
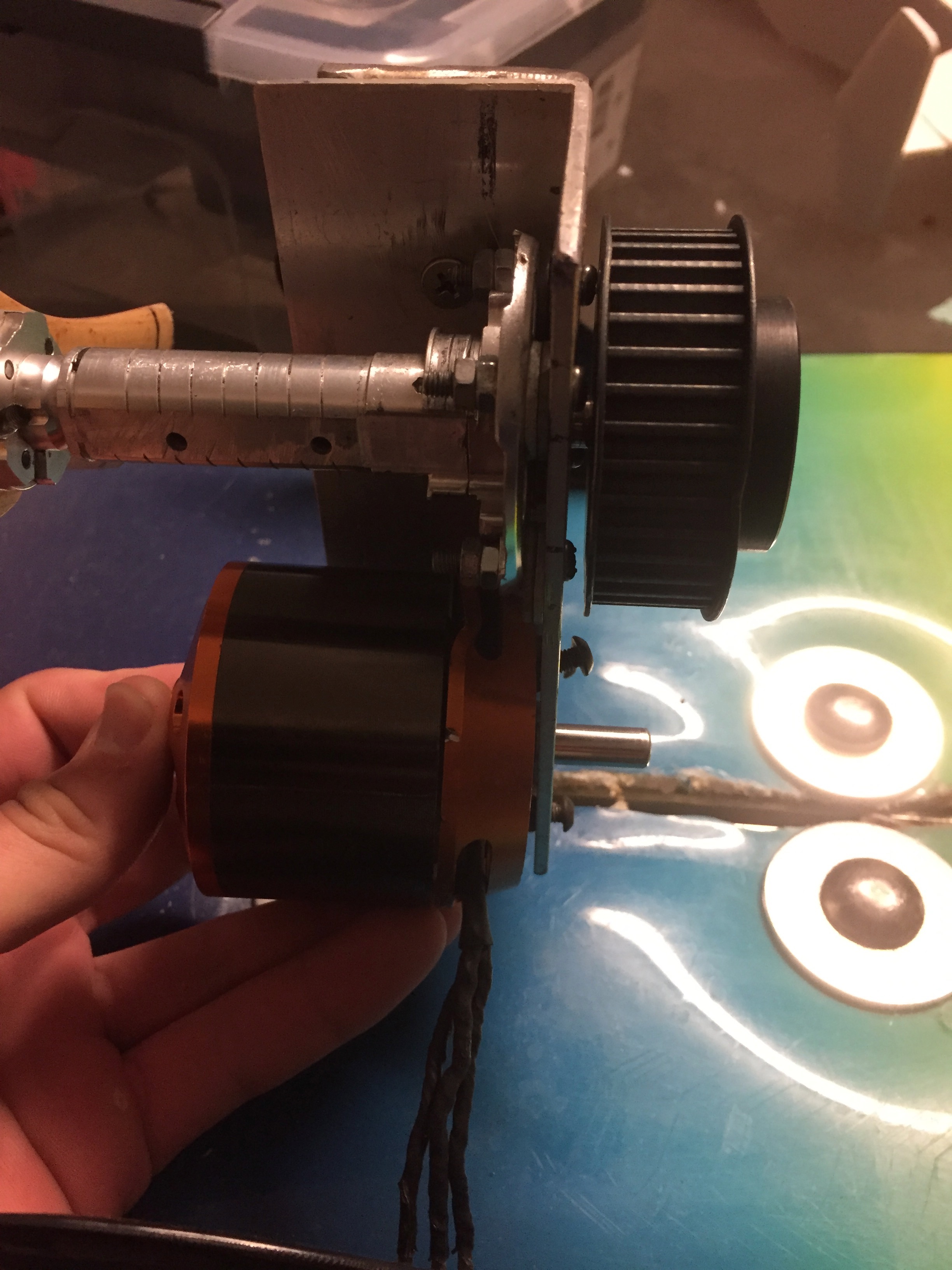
here are some more photos of the setup


Here is the video of it working:
I am discarding this design because there are many problems:
- The motor underwater alone at high RPM pulls 800W of power, compared to 35W in air.
- Too much drag with this layout
- Metal bearings and water don’t mix, after roughly an hour of use, the motor bearings had lots of slop, would need to watertight, or use ceramic bearings.
- The 120A ESC being used overheated after a few minutes of riding, it should be powerful enough to sustain riding if the drivetrain is efficient enough, I’m surprised the esc didn’t fry considering how hot it got.
- Even with the gearing couldn’t get above 80% throttle without the ESC losing timing with the motor, I think the VESC would handle this situation very well compared to these RC ESC’s, if only it could handle more power. Although this problem may have been just the ESC I used, or the fact that the wires were transferring current between each other via the water, confusing the ESC?
- The cheap $80 foam board takes a lot of power to get onto the plain
Now that I’ve tasted the success, I will make an E-foil, Im thinking with direct drive, with dual VESC 4.12’s and two 149KV motors submerged, but sealed inside a 3d printed housing, for longevity of the bearings, what do you all think?
Jake
1 Like
Im not sure wether the video worked, heres a link (don’t include the full stop at the end)
1 Like
What is the purpose? Either you have a cooling problem when you seal the complete motors. Or you have water inside the bearings.
You need to limit the waterflow through the motor, the spoke wheel acts as a pump. Its made for air, you need to modify the surfaces to be smooth and even to use it underwater. Instead of hundreds of liter you just need a few liters per minute running through the windings to cool it. 100-200W additional power is normal underwater for this motor.
1 Like
Yes that is a very good point. With your direct drives, what do you do with the bearings to prolong their life?
I think I will design a prop in fusion that uses those holes in the end of the motor to hold the blade from slipping, and at the same time act as an end cap for the motor to smooth it off, that should help a lot.
Testing with a VESC yesterday without a prop on 12S in the pool it was closer to 1000W underwater at full 60K ERPM, and when I limited the ERPM to 20K it was back down to around 70 watts, crazy the waste of energy as it speeds up!
As little as possible. I use stainless in two setups with different age. They sound loud. I have laying around ceramic stainless combination, but did not install them yet.
1 Like
Try corrosionX. I used the HD version, did a few try in salty water.
the only clean up i did was manually spin the motor while dropping some fresh water on it.
2 weeks later i finally disassembled the motor to inspect, the bearing are perfect… ![]() only thing that got rusted a bit is one of the magnets, apparently my coat of black paint didn’t hold well…
only thing that got rusted a bit is one of the magnets, apparently my coat of black paint didn’t hold well…
and power glider is right: to limit the power when running under water, you need to take care of the openings on the front of the motor.
At first i though it was the gap between the magnets, filling them out helps, but it was minimal.
Next i tried to simply block the water from going through the holes at the front of the motor, but it barely improved. You really need to fill the holes them self.
in the link below is the part is used… still to be perfected.
1 Like
Thanks Mat,
Man your build is awesome, it’s so simple but it works well! Im more motivated to get mine going now.
Im going for V2 E-foil, with a foil I ordered off Ali-express.
I’ve ordered a CR-10 3d printer so the build will become a lot easier.
It will be two 6354 190KV brushless out runners in line with each other, so one prop will be facing forwards and one will be backward, and counter rotating props may help eliminate torque steer.
For motor controllers it will be one VESC 4.12 per motor. A VESC can handle roughly 30 amps continuously without heating up with no cooling. So in theory it should be able to run 60 amps with the two combined fairly well and a burst of 120 amps for taking off.
The motor KV may be a bit high but I think it should be OK, ill just run a small prop on each motor.
What do you think?
1 Like
I don’t think saw a working 2 motors version yet, but there’s no reason it wouldn’t work 
there’s a bit of added complexity, you’ll have to run twice the number of wires, and i’m not sure how double ESC can be controlled, but i’m sure e-skates do it.
for the KV, i wouldn’t worry to much, you’ll just have to use smaller props, especially if you go with 12s batteries…
1 Like
You may want to look at how the volvo penta engines use contra rotating props.
1 Like
Do you have a sketch? You need two mountings one front one back. How are you going to assemble?
1 Like
Be carefull the set up is good the problem Will come from the propeller , you cannot spin around a boat propeller , doesn’t work in pull mode , as to be airplane propeller , big cut down with slow rrpm (1/15) ,
1 Like
Dual ESC’s are quiet simple, you can run the signal and ground wires in parallel into the receiver, with the 5V supply from only one ESC, or with the VESCS they can be controlled together via can bus.
I think I will settle for this design and tear into it ASAP, school holidays start in 2 weeks so its perfect timing.
I don’t Have a sketch yet, but I’m going to 3D print the motor pods which will clamp onto the mast similar to how most of the other e-foil builds are done, there will just be two identical ones for a motor on each side. As soon as I’ve made the mounts and propellers in fusion I will post them here.
The propellers will be 3d printed, so I can easily make two different types propeller for pusher/puller. I think I will make a propeller that wraps around the circumference of the motor, like @pacificmeister direct drive design, and make streamlined caps for the ends of the motor, to reduce the length of the drivetrain, compared to if the props were mounted on the end of the motors.
1 Like
I had a look at those engines, they have the propellers very close together…I would imagine that a larger gap would make the water more turbulent for the trailing propeller blades compared to if they were close. My design will have the propellers a fair distance apart from each other so it all be interesting to see how it works out.
There’s actually an optimal distance to have the propellers. At some distances they will be highly inefficient as the water will be disturbed by the first prop. You will just have to run numerous tests to see if you can find the sweet spot.
1 Like
Ha yes!, just like Dornier Do 335 - the fastest piston poweded plane ever built:)
1 Like