This is an awesome project! It looks much easier to build than the efoil, and it looks like I can use my large kite-wing. Is it possible to get some more design details? I would totally like to build this. Thanks!!
2 Likes
Reminds me of this:

1 Like
Please more details!
Awesome project !!! Any idea of how much power was used ?
You do not need any fancy remote.
Just a thumb gas on the handle, wired or wireless.
Both hands on the handle and you can enjoy the ride, like towed by a (manned) boat.
Keep it simple.
1 Like
Published: 11:44 BST, 18 May 2014
Boarder glides across lake at 25mph using hand-held electric jet engine
There was also this multi fan attempt which would have worked better on a foil. A picture that obvioulsy inspired Marc Lagarde with his SuperNova project (battery in a back pack).

Used with a harness in the patent:
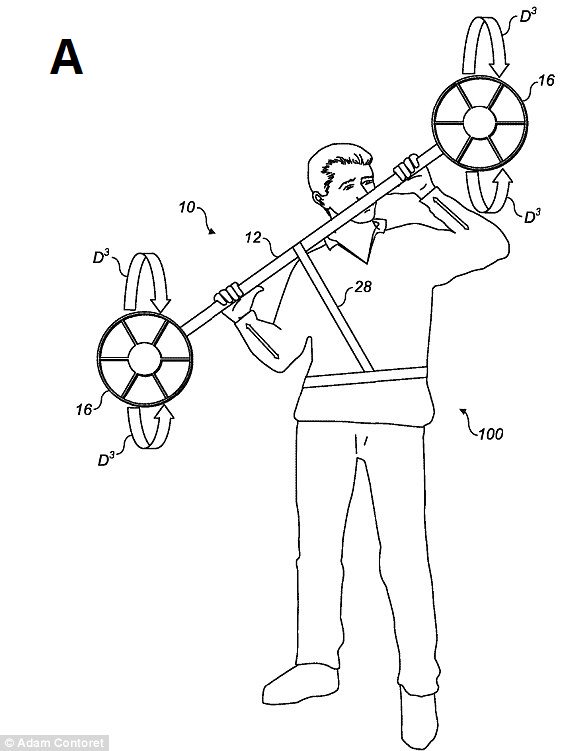
JET ENGINE ELECTRIC THRUSTER
- Energy: Converts 30kw electrical energy into a combination of heat and thrust
- Efficiency: 78 per cent energy efficiency, compared to 15% in a normal jet engine
- Engines: Four with 10hpw, each turning at 30,000rpm
- Top speed: 50mph, with 200mph exit wind velocity
- Battery life: Ten minutes
- Thrust: 110lbs
1 Like
what a great simple idea. would adding a rudder slow this down too much for the tow?
That seems like a pretty poor idea for a surfboard propulsion system. Several pretty huge issues that make this a no go for me:
- I don’t want to be anywhere near that thing when the impellers spinning in the air make contact with the water!
- Crashing into the water with a 30lbs battery anchor (and/or enough flotation added to it to keep me bouyant) strapped to my back sounds like a pretty rough way to enjoy the spin cycle of an overhead wave.
1 Like
I do agree with you on both points. Complicated, dangerous, heavy and… inefficient.
Just to illustrate another way to create a traction.
We have to keep in mind that this idea was developed 10 years ago.

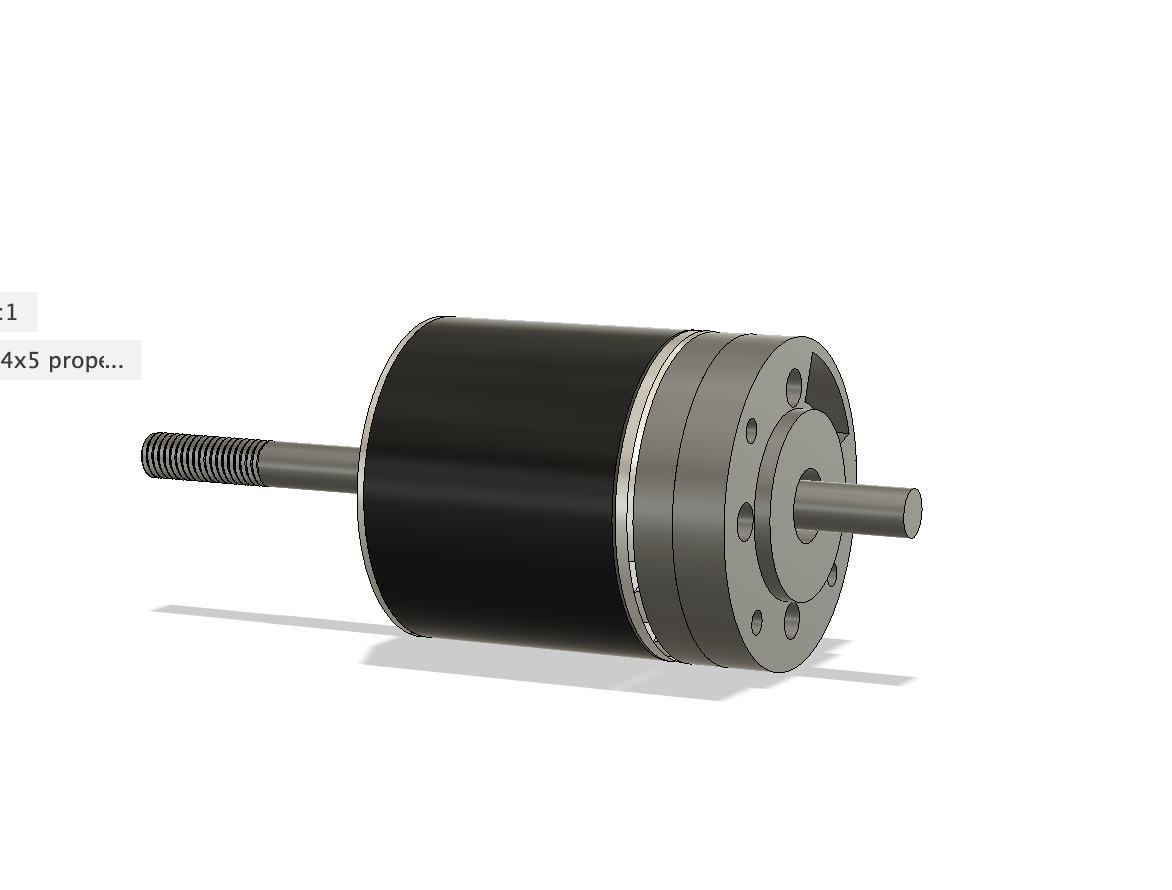
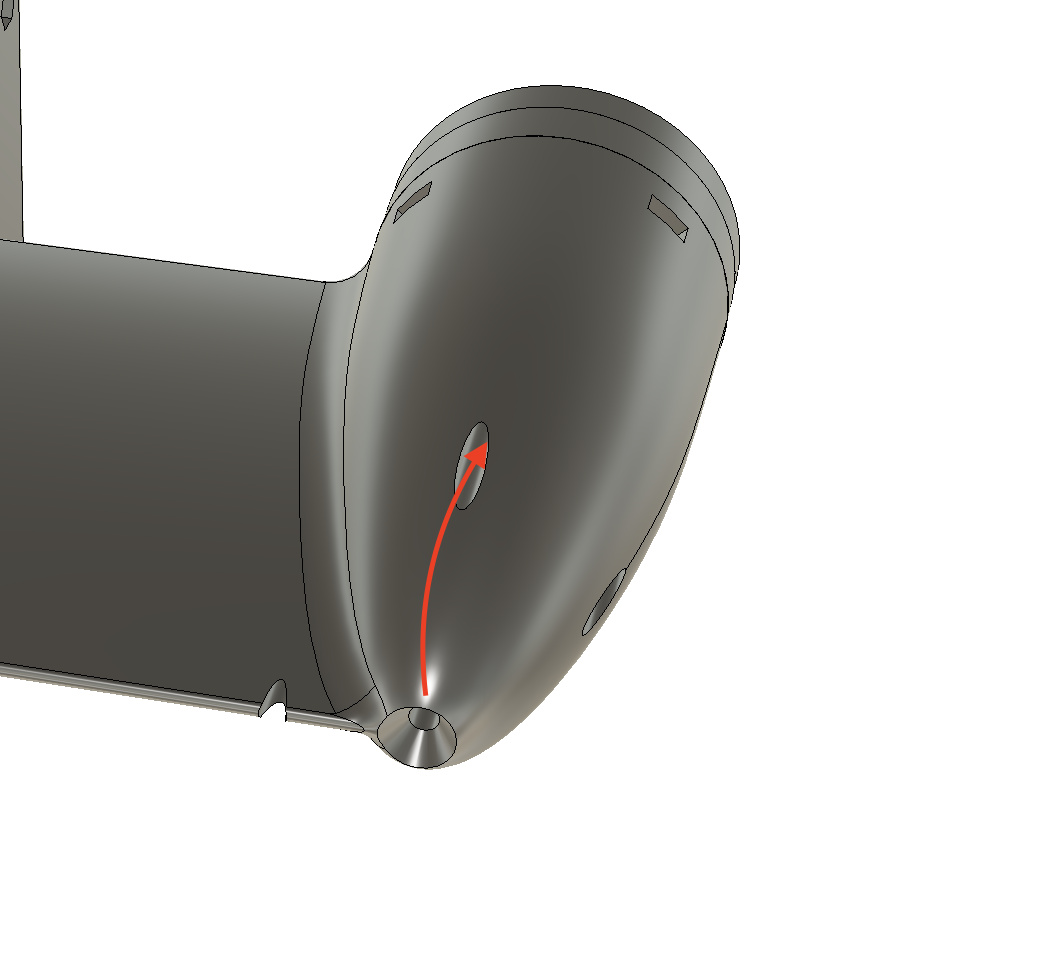
I made a motor mount for the 80100 motor a while back that is very similar. You print it in 2 parts; the main body and motor mount plate. You put the socket head Allen bolts (to hold the motor) into the motor mount plate, without attaching the motor. Then bolt the plate onto the main body with M6 bolts and tighten. Then put on the motor and put an Allen key through the holes at the front to tighten the motor. There is room inside to route the cables up to the board too.
You have to route the wires through both parts before bolting the motor mount plate to the main body.
You could also adjust it for other motors.

6 Likes
Thank you 
Was looking for 63xx mount, but will try 
I love that you’re using a regular 63xx type outrunner. I’m using three of those on two DIY skateboards. But the other key question is what voltage are you running, and what speed controller do you use?
Thanks; your build is a real inspiration!
Mine is 6384 120kv, Flier 400A ESC, 12s1p ~50v lipo, 156mm two bladed 3D printed propeller.
Static test in the pool with my watt meter reading, 116 amps 4300w at full throttle, that’s pretty high for this motor in my opinion, I should try 145/150mm prop.
300A esc should be absolutely fine, I heard you could use 150A ESC on 6s lipo if you’re a light guy, just choose slightly bigger prop.
1 Like
Thanks so much for the detailed response. You mention that you should try a different prop. You feel it’s currently over-propped with the 156 2-blade? Is it not giving you enough torque? What pitch is your 156mm prop?
The 6384’s I’ve seen are spec’d for 24-36V. I was wondering if they would handle 50V. Sounds like yours is - right?
So at 50V and 120KV, you should be seeing 6000 RPM unloaded. Assuming a 6" pitch prop (just my guess) that you puts you at a theoretical 34 mph - maybe a real world 27 mph. Does that feel about right?
And the real big question. Did you have any trouble setting up that motor/ESC combination? I’ve got some experience with VESC controllers, but I’m helping a buddy out with his project, and we finally gave up on his Flipsky setup because there was absolutely nothing we could do with hardware, firmware, or configuration to get that setup to perform properly under load.
Again - thanks very much for all that detail.
I really love this idea. Looks like a lot of fun. Would it work if you had a high powered RC model boat?
Yes, of course it worked in this case: A high-performance RC model of the ship would have to have at least the same performance, as stated and addressed above. So the question is whether such an RC ship model exists, whether anyone has built one, etc.
Yes but in my opinion you need higher torque than high RPM, big prop, for a “more efficient pull”
1 Like
Can someone point to the right electronic components to build this tow boogie? What would be the best motor, ESC, battery, remote combination? I do not need fast speed; 15-20 MPH is enough. Are 6384 and the “VESC HI200 75V 200A” are good options? Which battery pack is reliable? I tried to search forum but there is just too much information. Thank you
1 Like
@Valhalla have shared a spreadsheet with the components he used for his tow boogie, see here Valhalla’s Tow Boogie & eBuild - #75 by Valhalla