In the electric foil system there are several microprocessors to control various aspects. At the top of the hierarchy is appears there is going to be a central unit that handles the coordination and high level functions. The EFCAM for short. Perhaps this can evolve into an open project such as the APM ArduPilot for drones.
The purpose is to use a microprocessor such as an Arduino to coordinate the inputs and various sensors and tailor the outputs for riding assistance, safety and control. Software approaches to be tailored to different platforms and applications and customizable by the user.
Here are some of the potential inputs that will be used for the system as I see it currently. Please contribute on whatever possible inputs and outputs that can be imagined.:
Hardware:
- Main start / emergency stop
- Rider presence sensor
- Throttle
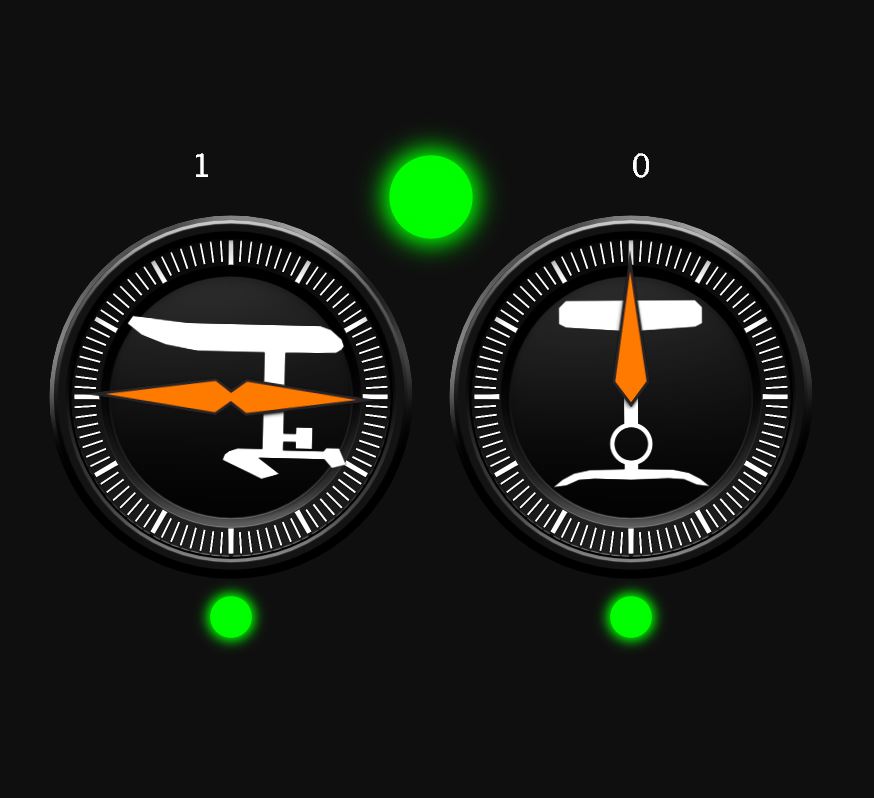
- Pitch and Roll IMU
- GPS
- Current Sensing
- Battery Voltage
- Motor Temperature
- ESC Temperature
Code:
- Main battery relay powerup and various emergency shutdowns.
- Ramp up smoothing of the throttle for power train loading.
- Motor smooth riding ramp downs.
- Data logging
Outputs:
- ESC PWM control signal
- Main Relay
- Display Indicators
- Audio
I have a (tabletop) working BNO05 IMU code prototype on Arduino and will share it shortly.