Since I am building a direct drive and don’t have to worry about a gearbox I would like the ESC to emergency brake (basically as hard as possible) the motor when a leash opens a reed switch and/or the board angles more than e.g. 45° in any direction (using a gyro).
I basically have three questions:
Has a hard braking any damage potential to the mechanics and electronics?
How long will it approx. take until the prop is almost stopped?
Hard braking will obviously introduce a lot of torque, is there more injury potential in a braking or a free wheeling motor (and prop)?
I use it on my direct drive, when you let go of the throttle the prop instantly stops I’d say within 0.5 seconds. Braking doesn’t hurt anything at all and as long as the prop is mounted securely it won’t come off I don’t think this braking feature is necessary though since once the throttle is let off even without a brake, in water, the blade stops turning very quickly.
It would be safer to implement a dead man switch so you don’t accidentally hold in the trigger when you crash, this is what is most dangerous I think. Im slowly working on this at the moment but I’m just learning arduino…
Thanks, that is very helpful! I have three safety features in mind, I am not sure yet which of those I will implement, I think all or at least two of them at once would be best:
Dead man button on the remote
Board tilt detection
Dead man switch through board leash
All of those would trigger immediate braking and overwrite any throttle signal from the remote.
@jakebarnhill1 if you need any help, just message me, I am computer science student and already did quite some arduino projects.
@Benjo thanks! good to know, you’ll have some questions from me soon no doubt, cheers!
dead man switch through board leash could work well, but having a leash attached to the body could make it a bit inconvenient to lie then stand up etc. Board tilt would be great since its built into the board, no inconvenience to the rider, id imagine coding it for lots of different scenarios could be very difficult.
I would think it is basically as simple as defining (possibly different) threshold angles for the roll and pitch axis. Under normal operation the board shouldn’t rotate past a (rough) point because you can’t pitch the board above a certain point (while accelerating) without falling and you can’t roll it (when turning) more than a certain angle without falling, so anything past those angles can be considered a (ongoing) crash.
I’m using a regular coiled leash attached below my knee,Coiled leash avoid the risk of having it getting caught in the prop, don’t drag in the water when you’re riding, and stay out of the way wen you stand up. But in the end each time i fell, the board stayed really close to me anyway. It’s mainly useful when playing with the throttle and you’re not on the board , and gives peace of mind just in case the board bug and tries to escape:)
I have:
a dead man trigger on the remote.
a safety on the arduino receiver that puts it at 0 if it looses signal for more than a second if i remember correctly. (basically if you put the remote under water)
No other safety.
When the prop is not turning, it’s pretty good at slowing the board down, and when you fall the board is rarely flat, so it would be stopping anyway.
The tilt wound be overkill i think, and that’s one more thing that can go wrong…
Adding a dead man with the leash could work, but you’d have to have to reset it each time you get back on the board, and you always run the risk to trigger it by mistake when riding.
So are you braking the motor if you release the dead man trigger on the remote?
The thing is I need something that triggers a motor stopping mid-crash without relying on me releasing a dead man switch intentionally or by reflex. For that a leash could work but has the disadvantages you mentioned and I think due to its length it would be slower to trigger than a tilt detection. This sensor setup is a thing to be tested, but I think it can work reliably and with the quickes reaction time.
What I ultimately want to achieve (and don’t know if realistic) is that if I fall into the prop the motor is braked soon enough to be very slow or is standing still in the moment I hit it.
Not sure if i’m braking, i just set it to “90 degrees”, neutral trigger position.
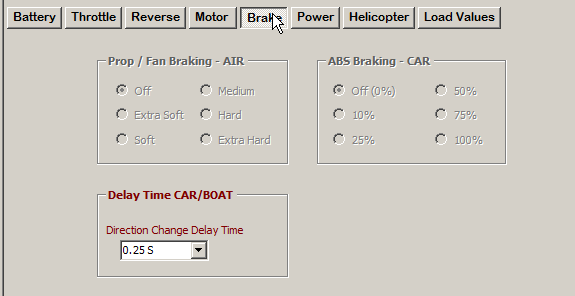
below is how the brake screen for the setup of my ESC looks like, i don’t think it’s actively breaking, but as @jakebarnhill1 said, in the water, the prop will stop very quickly…
Stopping the motor to early when starting to crash would rob you of any chance to recover
Ok, thank you.
I think I would be fine with crashing a few times more and then in a relatively safe way. For the tilt detection I would try to find a good trade off between braking too soon and and too late, obviously. I hope that there are angles of the board that make it unlikely to recover anyway but occur at a time that is soon enough to brake in time.
I notice to that with a some my crashes the board can actually stay level, the gyro wouldn’t pick up these circumstances.
It’d be cool if we could have a flight controller that notices small pitch changes and adjusts motor speed accordingly to keep the board level. This way when you turn and the nose begins to pitch down the motor will automatically speed up and the rider won’t need to adjust the throttle to keep level through a turn.
 I don’t think this braking feature is necessary though since once the throttle is let off even without a brake, in water, the blade stops turning very quickly.
I don’t think this braking feature is necessary though since once the throttle is let off even without a brake, in water, the blade stops turning very quickly.