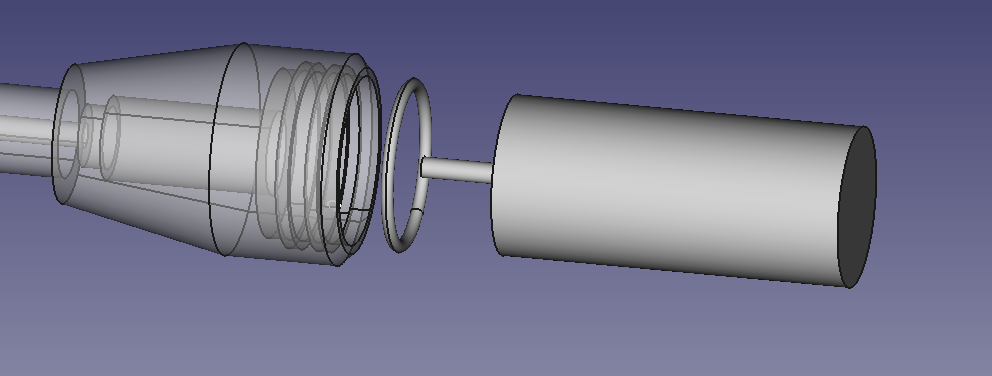
I’m thinking about skipping the aluminum tube around the electric motor, just sliding the 3d-printed parts onto it using o-rings for sealing, something like this:
(the motor is to the right in the picture).
Anybody having any opinion about this approach, is it stupid to do this? I imagine the salt water might corrode the motor hull but I’m not sure what material it is.
I don’t see any benefits from this. How are you connecting it to the motor and how do you make the backside waterproof? Also it is not as streamlined as with a tube.
The tube only adds 4mm in diameter, motor diameter = 56mm = ID tube, OD tube = 60mm. Aluminium is much more stable than printed plastic and helps to accommodate a gear if you need one. Also for hydrodynamics I don’t see a benefit from having a smaller diameter in the middle of the pod, the more edges, the more turbulences (equals drag).
Alternatively you can use a direct drive motor like 65161 which is waterproofed by design to avoid the tube. OD of this motor is 65mm.
Thanks for the feedback! @Rienk for the backside, I’ll just more or less just copy the design of PacificMeister I think, connect it to the back part depicted in the image, locking it to the motor that way. I’ll share the design once I’m done
The reason I’m trying to get rid of the tube is that I’m not really thinking of doing this just as a one-off, if everything works fine I’d like to have cost optimized design that could be used in serial production, and every part and manual assembly step is adding cost of course. Thus, I’m willing to sacrifice a little bit of performance for cost savings.
@sat_be That motor looks very cool! But it’s pretty expensive, I’d like to see if I can get away with a regular cheap motor.
No sure I understand you point of view …
Your setup still miss the gearbox. You won’t be able to spin a proper prop with a 1-2Nm capable motor. So if you consider a 56114 or 56104 motor and Neugart gearbox you are already above $400 (I paid brand new Neugart gearbox for 300€ I think). Which is the price tag of a 65161 @sat_be suggested…
Oh, I’ll definitely try to get rid of the gearbox, I know I’ve seen some people here are not using one, so I guess there’s a way to match motor+prop properly without a gearbox. But I’ve not gotten that far, so I might be wrong of course.
If you add a planetary gear which you will find out is necessary with a cheaper sss5694, sss56104 or 56114 500KV Motor, you don’t save much unless you build your own gear or find a cheap solution (like Lada starter).
I suggest to use direct drive, no hassle with couplers, pinion gears that get loose, not to mention maintenance of the gear. The pod is also shorter with direct drive. Only advantage with geared drive is acceleration as there is more torque at lower speeds.