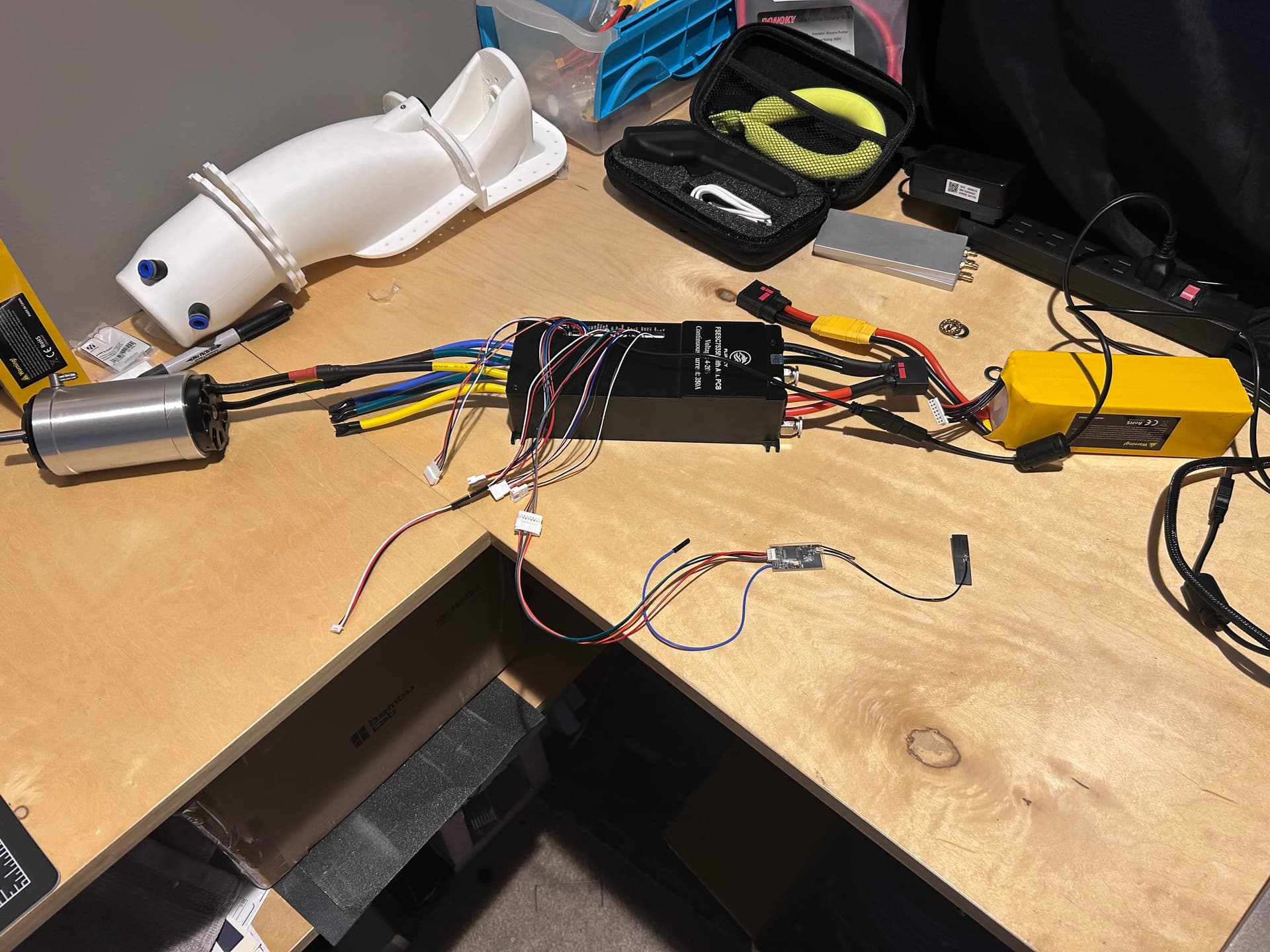
Hey, I’m new to all of these electronics and am having issues getting my motor (SSS 56123 V2 500kv) to work with my Flipsky 75350 and VX3 remote. I’m sorry if I explan badly, and will try my best. I am testing with a 6s 8100 mah battery just to get it to work properly but plan to have it 12s once I get it figured out. I am creating a jet surfboard so I will have a higher rpm than foils.
I have watched countless videos on Vesc and can’t seem to get it working properly.
I am currently using the UART APP as I can get the motor spinning with this configuration. If I use the PPM and switch the wiring the motor does not want to spin at all. I get a esc battery power is less than 0% error on the VX3.
However when using UART, I get either high duty cycle or none( the rpm stays constant after ~ 30% throttle. It seems like it wants to spin but it doesn’t have enough power.
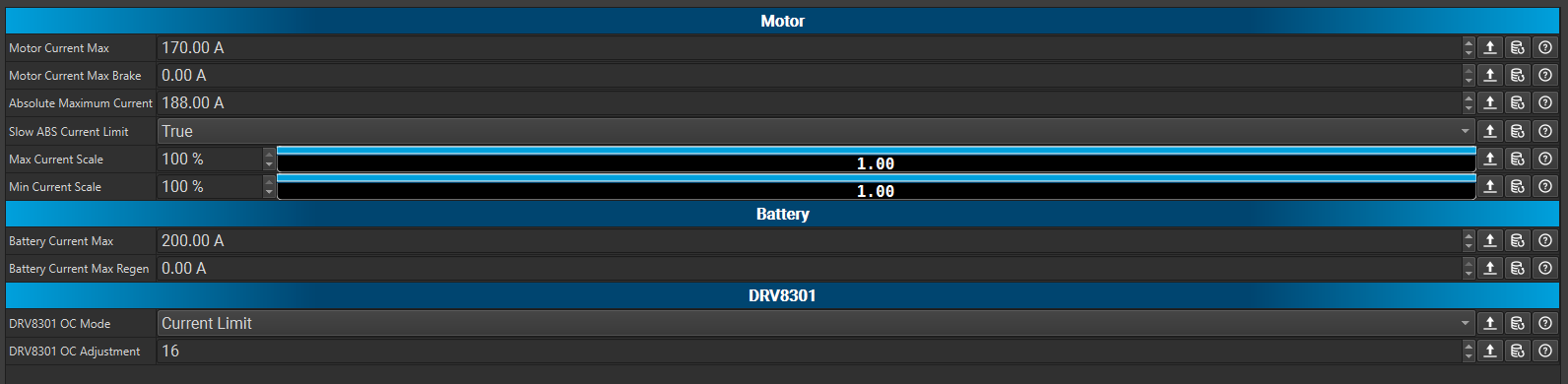
Here are my motor settings, I have max power loss at 4000w (tried to stay conservative) when setting up the motor, poles 6. Voltage is set to default for 6s (cutoff start 20.4 V and cutoff end at 18.6 V).
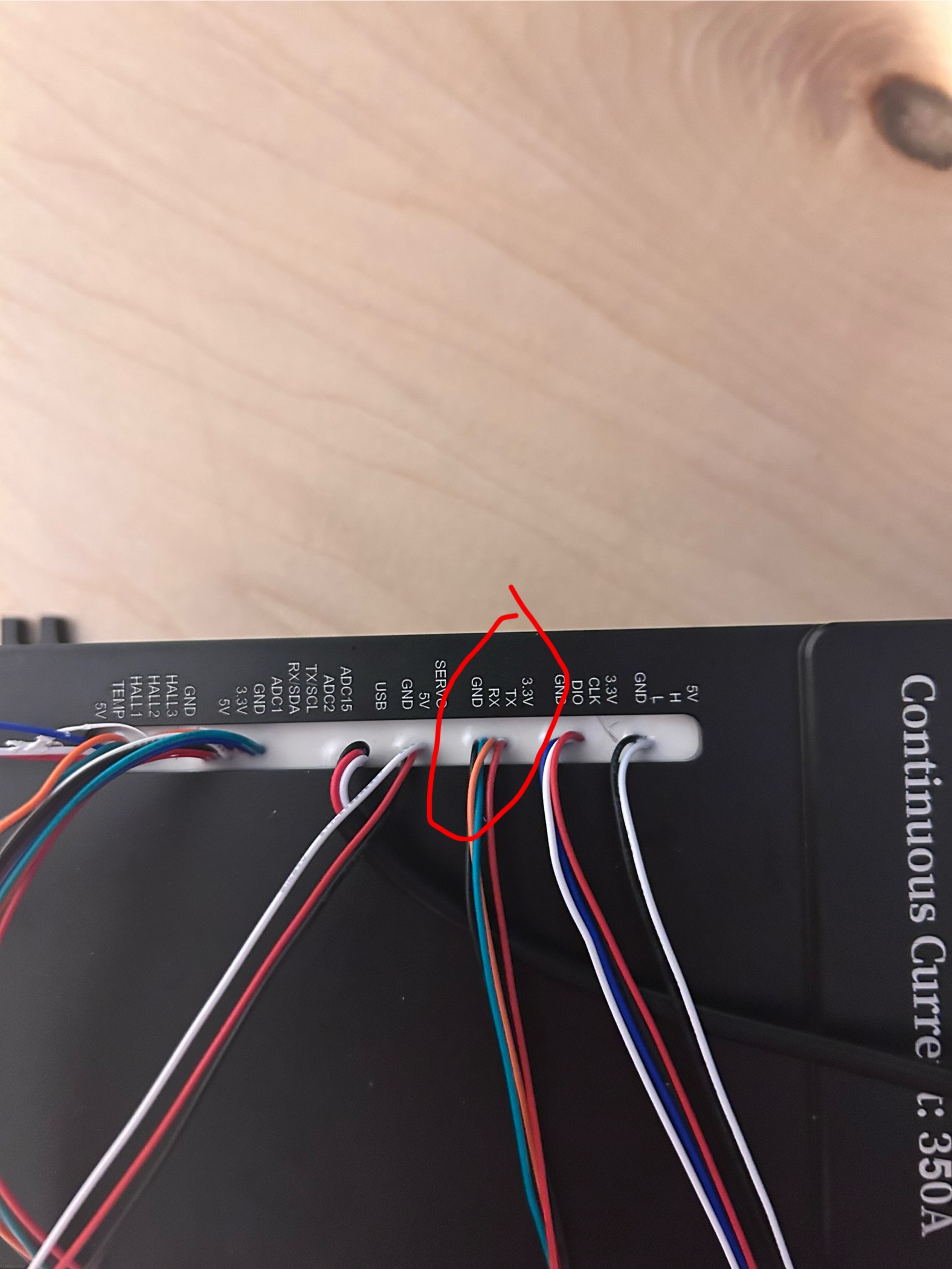
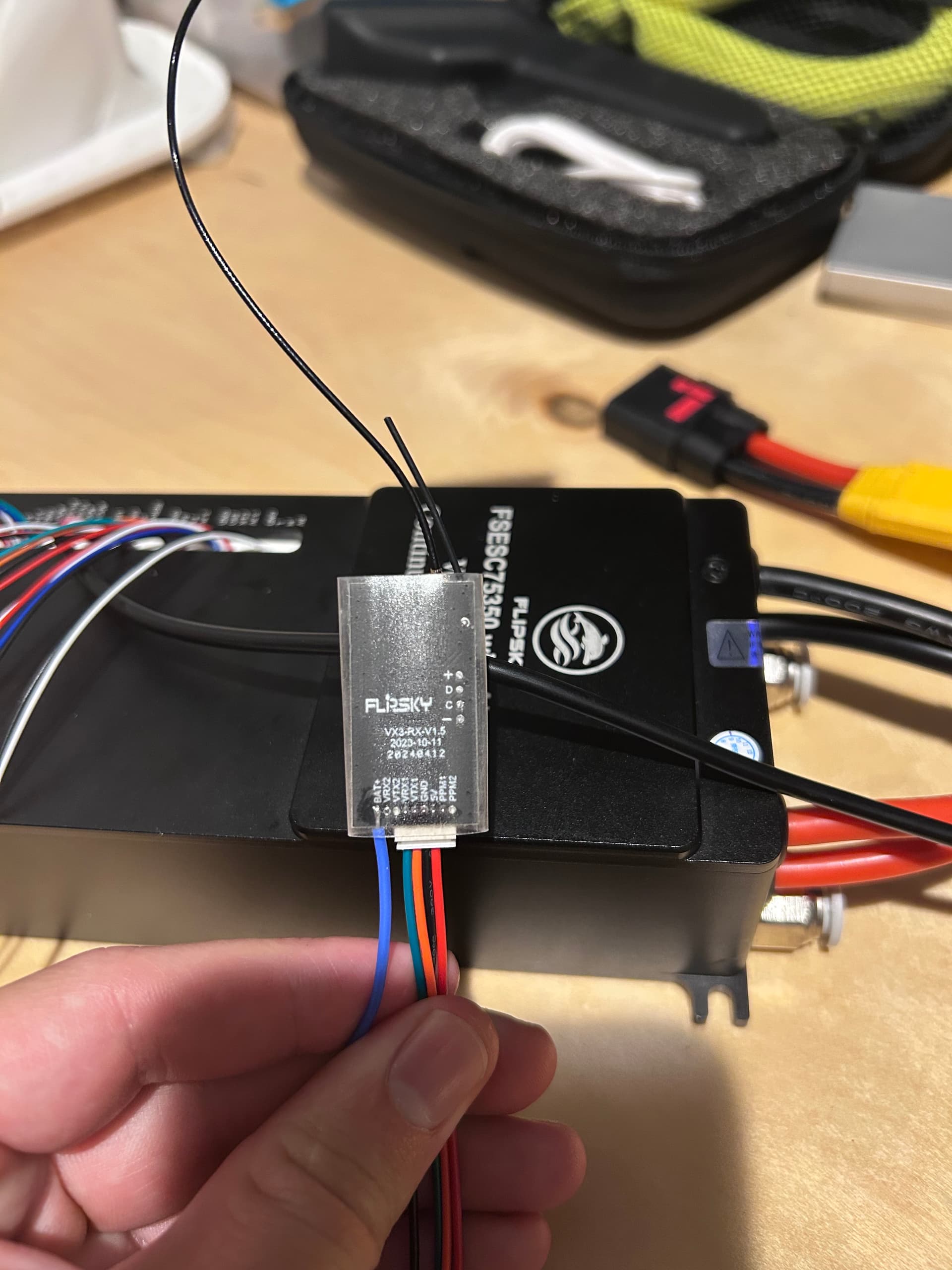
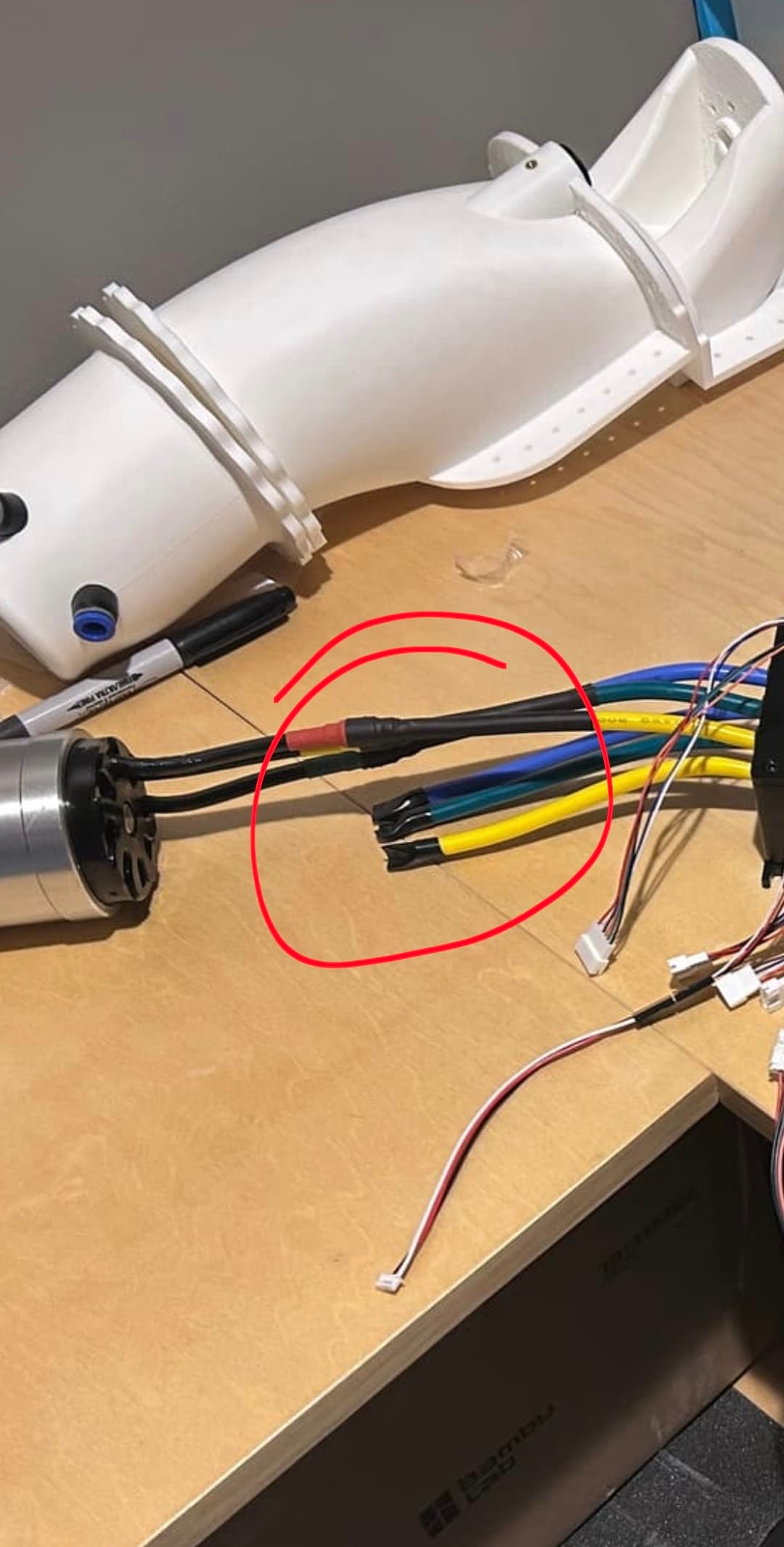
When I pull the trigger ( 4 wires in reciver - UART App) the motor doesnt respond until I go full throttle a couple times then it starts spinning at around 20% throttle but at a constant RPM up to 100% throttle. The remote has a negative watt value of around -30 to -60 and a negative amprage of -1 to -3. I have double check wiring and it all seems correct. The 75350 says its power for the output I am using is 3.3v and the reciever says it needs 5v. But this is the only way I can get the motor to spin at all.
4000W power loss seems high, should be 10-100 at a guess. Not sure what difference that would make though.
Another thing to note is that without load on the motor, even a tiny amount of throttle will make the motor go to max rpm and also give weird negative readings.
Since it is a large motor, the default Max power loss is 400 W. Does this still seem high? I may have misunderstood what it was.
I changed it to the recommended 400W , no difference as you had said.
When I pull the throttle, nothing happens until about 20%, then from 20% onward it is the same rpm. It definitely does not sound anywhere near the max rpm of the motor. But still giving the weird negative readings.
I just tried under a bit of load, the motor doesn’t really want to spin at all. Even under full throttle, it is only pulling ~1.2 amps.
In my opinion your foc settings are not correct, start the wizard again. Maybe the auto detection does not work correct. Got the same problem on some type of motors.
Here is a link to a good Video how to do that.
If auto detection does not work correct try the values you see in the Video and play with the values on foc page. You also got no hall sensor. There is also a manual detection on the foc page.