I have finally collected all the various parts (and a few tools) from around the world. That alone was quite an interesting odyssey. One of the tools (from Prague) is a Prusa MK3 printer kit which took six weeks to get and two days to assemble. Here it is in action just finishing the thrust bearing mount (STL file courtesy of PM!)…
Reminder to all: Don’t forget to add your build profile. Details HERE
Easily the most difficult step so far of my PacificMeister inspired build has been the drive shaft. Like some others, I have found cutting threads and a hole for the prop pin impossible in these 8mm chrome plated high carbon steel shafts from Amazon. So I ordered one of these 8mm stainless steel shoulder screws which was easy to drill and already had threads. However, its actual diameter is 7.82mm (the carbon steel shafts are 7.96) so the fit into the spec’d blue connector is not as tight and introduces a slightly greater wobble issue. [Update 10/17/18 - For now I’m going with the aforementioned shoulder screw and blue connector]
After reading scores of posts I see that many are struggling with the same gearbox-shaft-to-prop-shaft connection. It’s failure – both the blue one above and several other types tried by forum members – has been blamed for many seal leaks (from the wobble), slipping shafts (from the connector grub screws not holding) and even at least one lost prop and shaft (from the whole shebang disconnecting).
So what have I learned? No surprise to see many smart people here coming up with many creative solutions. My plan is to find some shaft stock that is: A) Exactly 8mm in diameter (±.05mm) and B) Of slightly softer metal making it easier to thread, cut and drill than the original shafts. I have also ordered a couple of different couplers to try. Finally I may trot that original shaft off to a machine shop and let them have a go at machining it.
When the coupler fails it’s a lot of heartache to cut the pod open and fix it. I’m hoping to skip that step!
P.S. - The ultimate solution would be a Neugart PLE40 gearbox with a longer shaft negating the need for the coupler and shaft extension. I just wrote them about this (details HERE).
Finding waterproof connectors that allow you to attach/detach the wires between the ESC and motor presented more of a puzzle that I might have expected. I did extensive searches online and even shelled out $32 for an EV connector which is back-ordered until the end of the year. I gave a lot of thought to designing one from scratch. But then I hit upon this super-easy off-the-shelf solution that is readily available on Amazon. It consists of a small waterproof shell and a shielded banana plug that fits inside. Together they make a easy to assemble and use solution - one for each of the three motor wires. Tested underwater without any leakage for three hours. Field tested as well. Note the shell comes with a small wire connector inside which I discard and use the banana plugs instead.
In my case I will place them on a short pigtail close to the waterproof battery and esc box up on the board so I can easily take the box off. I have a slot thru my board that will also allow the foil side connectors to pass thru the board if I want to remove my foil.
The junction box itself doesn’t have any cables, so it shouldn’t have an effect on the overall current rating, the banana plugs determine it. As long as the box can withstand the temperature it should be fine.
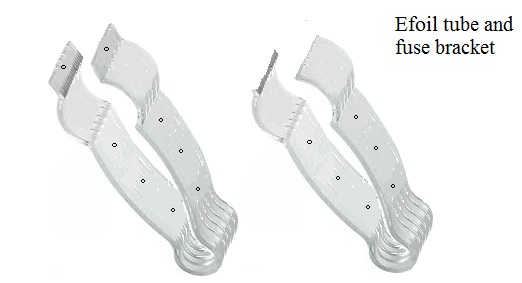
The weight of the SSS motor + Neugart gearbox is a little alarming when you first slide it in the tube and hang it off the back of the mast. All the weight is only supported from one end, putting a lot of stress on the mast clamp. It appears that some address this problem by resting the prop duct on the rear foil. I wondered if that impacts the lift efficiency so opted to design/print a bracket that snugly slides over the tube and mounts to the foil frame. CAD file and details available HERE if anyone wants it. Fits the PM spec’d tube.
I would see that bracket differently in order not to weaken the fuselage and to make it re positionable.
Right setup: the tube part does not need to be totally circular. 3/4 of a turn or 210 degrees should be enough.
To be as flush as possible, I would give half of a NACA airfoil section to each surface (thicker on the leading edge towards the foil mast).
Can be hinged at the bottom.
Interesting idea. More disturbance to the water flow as it approaches the prop (if that matters) but saves drilling two screw holes in the foil fuselage.
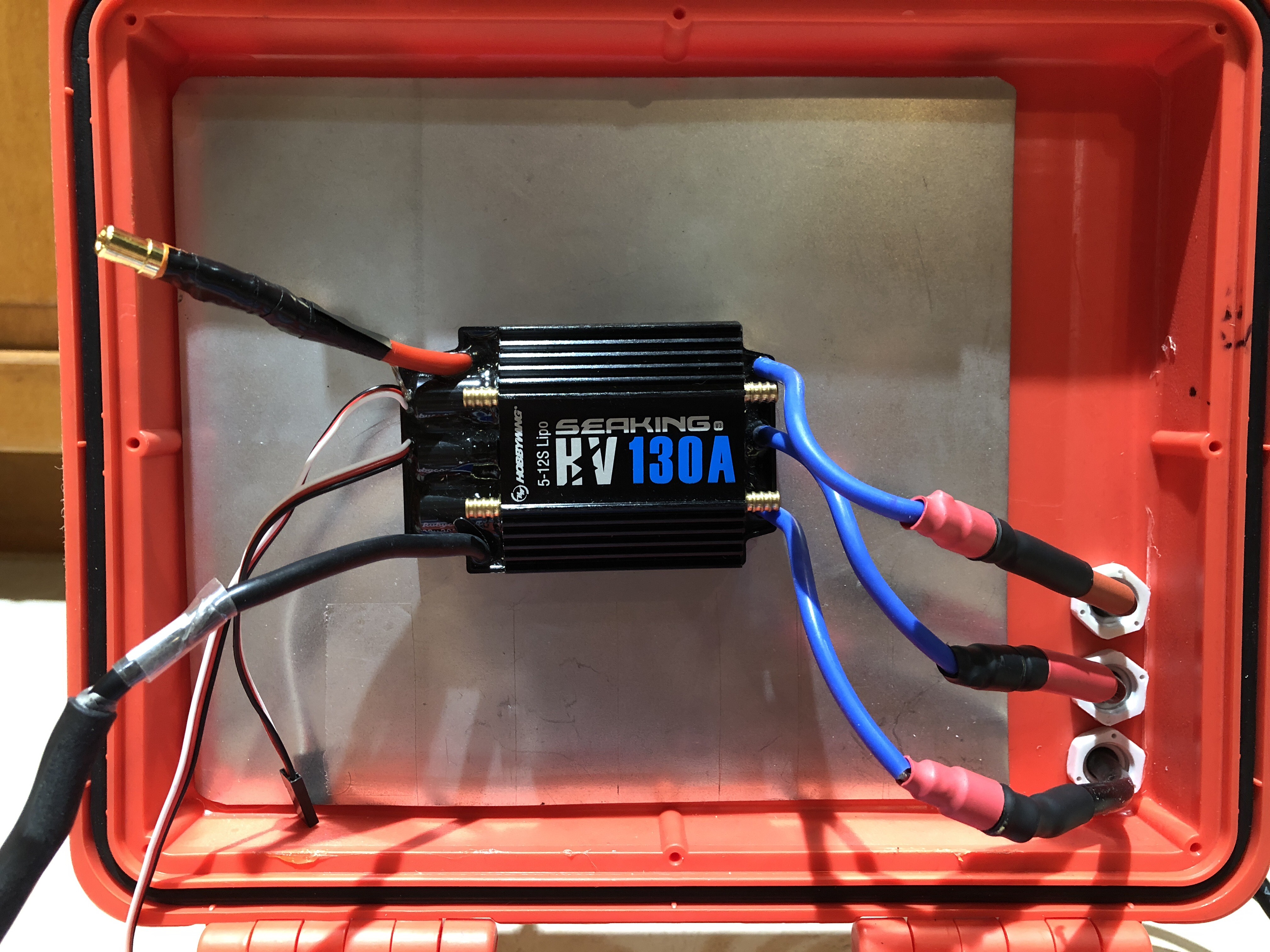
This is my box for initial testing. It will be strapped to the tail of the board. It holds four 5S 5000mAh batteries running at ~42 volts (2 series x 2 parallel) plus my esc mounted to a metal plate for heat dispersion which in turn is held in place by magnets. The whole thing connects to the motor wires via the plugs described HERE.
I know how critical prop shaft alignment is when using a coupler from the many posts of others that had leaks due to a wobbling shaft. So how best to do it? When the prop shaft is mounted to the gearbox with a coupler and powered by the motor it spins too fast to see exactly in which direction to make any adjustments. So it must be done with the gearbox disconnected from the motor and turned by hand. Recording this on a smart phone with a couple of reference lines and a mark on the shaft makes the whole process even easier. Then it’s just a matter of fiddling with the set screws until she spins true. Set-up photo and resulting video below.
I’m not sure if this is enough to make sure there is no wobble in the end of the shaft because it still depends on the position of the bearing when everything is assembled, so it also depends on the roundness of the tube and accuracy of the part holding the bearing. My idea on checking if the shaft is running true is to put gear and shaft into the tube and attach a 8mm shaft that sticks out of the tube on the motor side. I would then move the shaft by hand and check the shaft on the propeller side with a dial indicator gauge. The question is what is acceptable? ±0.05mm? The shaft itself also has tolerances on how straight it is, should be quit good though, something like ±0.01mm/10cm or better. Has anyone measured concentricity of the shaft?
I think it all starts with having a shaft coupler and shaft extension that are spinning true and perfectly aligned with the gear shaft. And then – yes – the sealmount bearing must be properly positioned to accept that shaft. But is is far easier to make adjustments to the coupler while the sealmount is not in place.
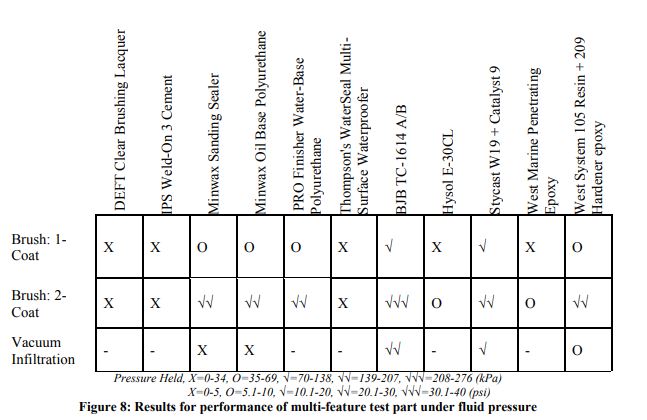
Interesting technical paper on the best way to waterproof 3d printed parts. The chart below shows how much pressure each ABS printed part was able to withstand in kPa and psi based on the application technique and the treatment product used. For example two brushed-on coats of Minwax polyurethane was able to withstand 20 psi.
Getting an 8 gauge wire to go into these 8 gauge copper crimp butt connectors is no easy task. Inevitably some of the wire strands get pushed outside. I have found using a flaring tool beforehand makes the task far easier. A slight flare at each end makes the wires funnel into place perfectly.