Hi everybody,
after e ton of work in developing and builds I would like to share my entire project of foil assist.
My challenge was also to develope a new remote controller and receiver for the board which I describe in an other topic of foil.zone
In the website www.foilassistproject.com is possible to find more details for each parts
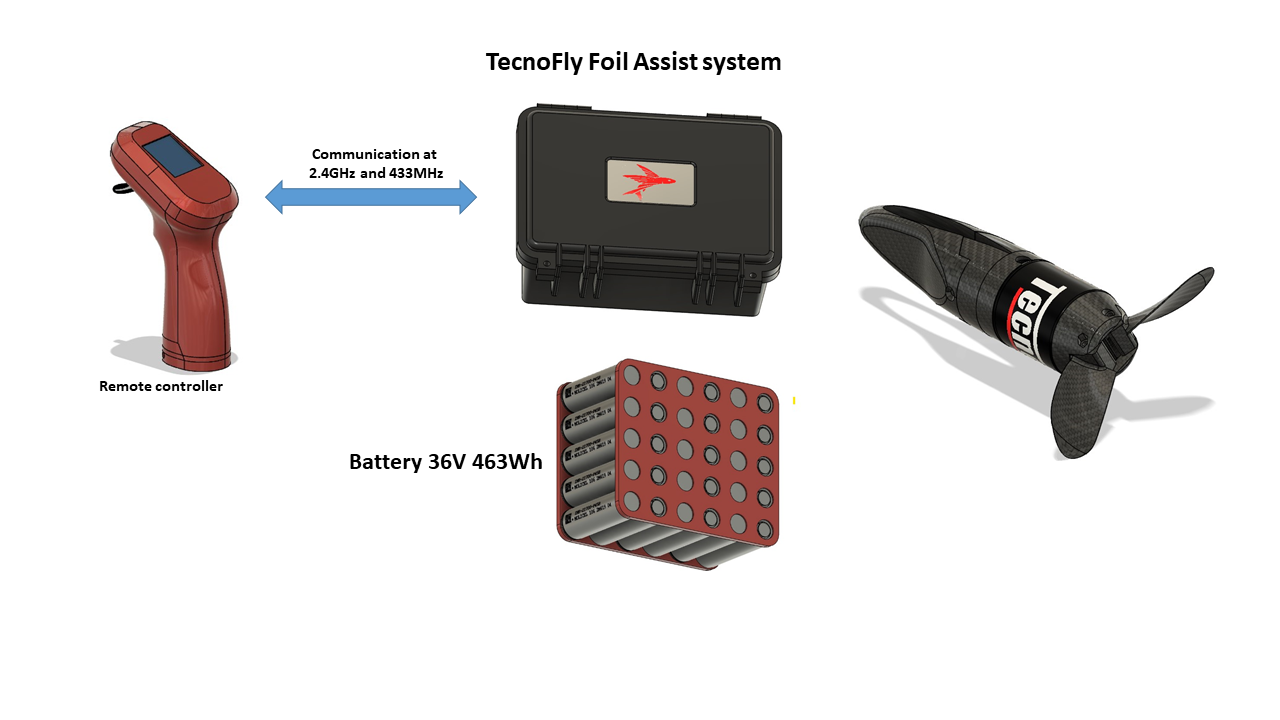
Foil Assist system features:
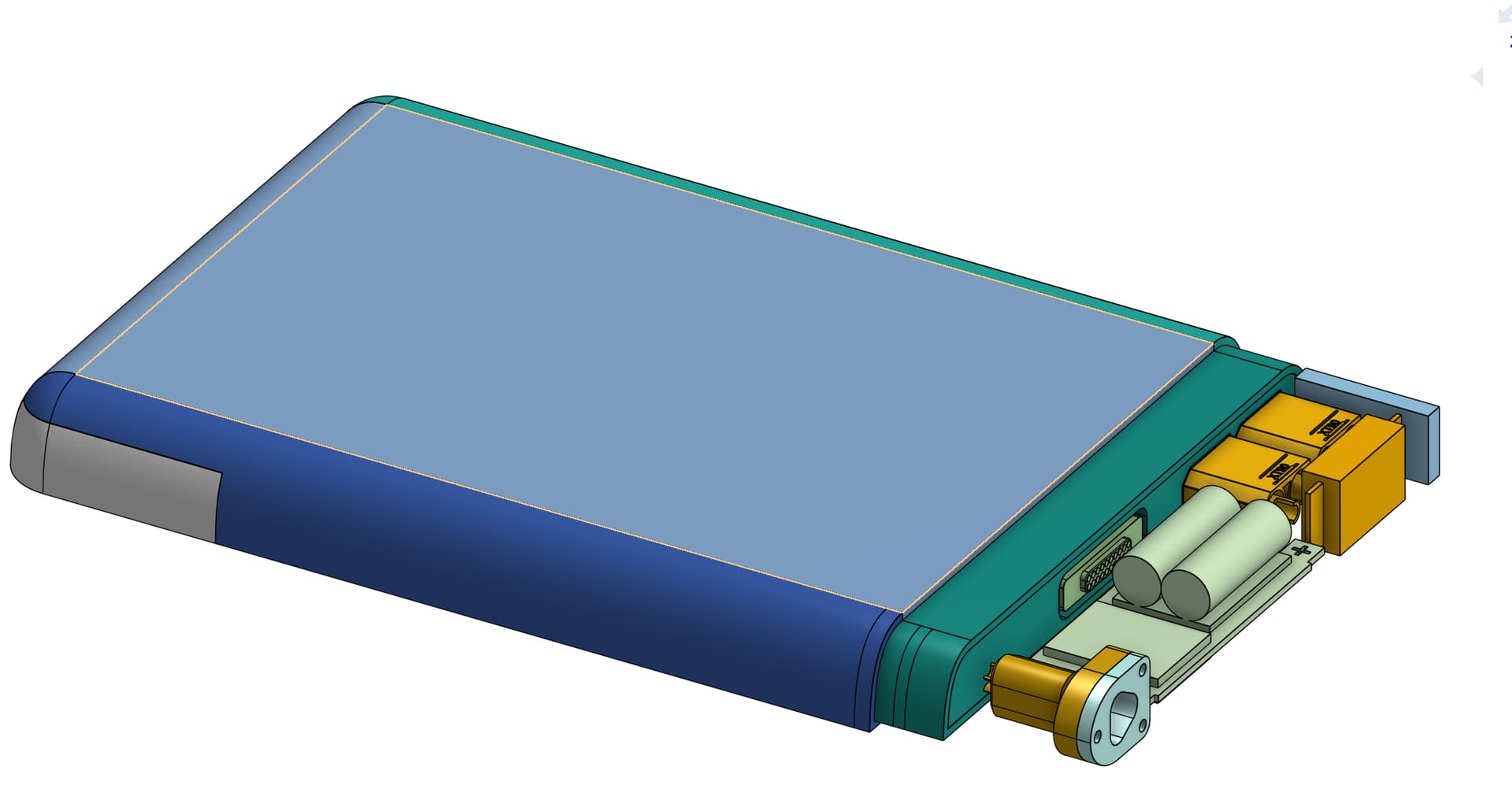
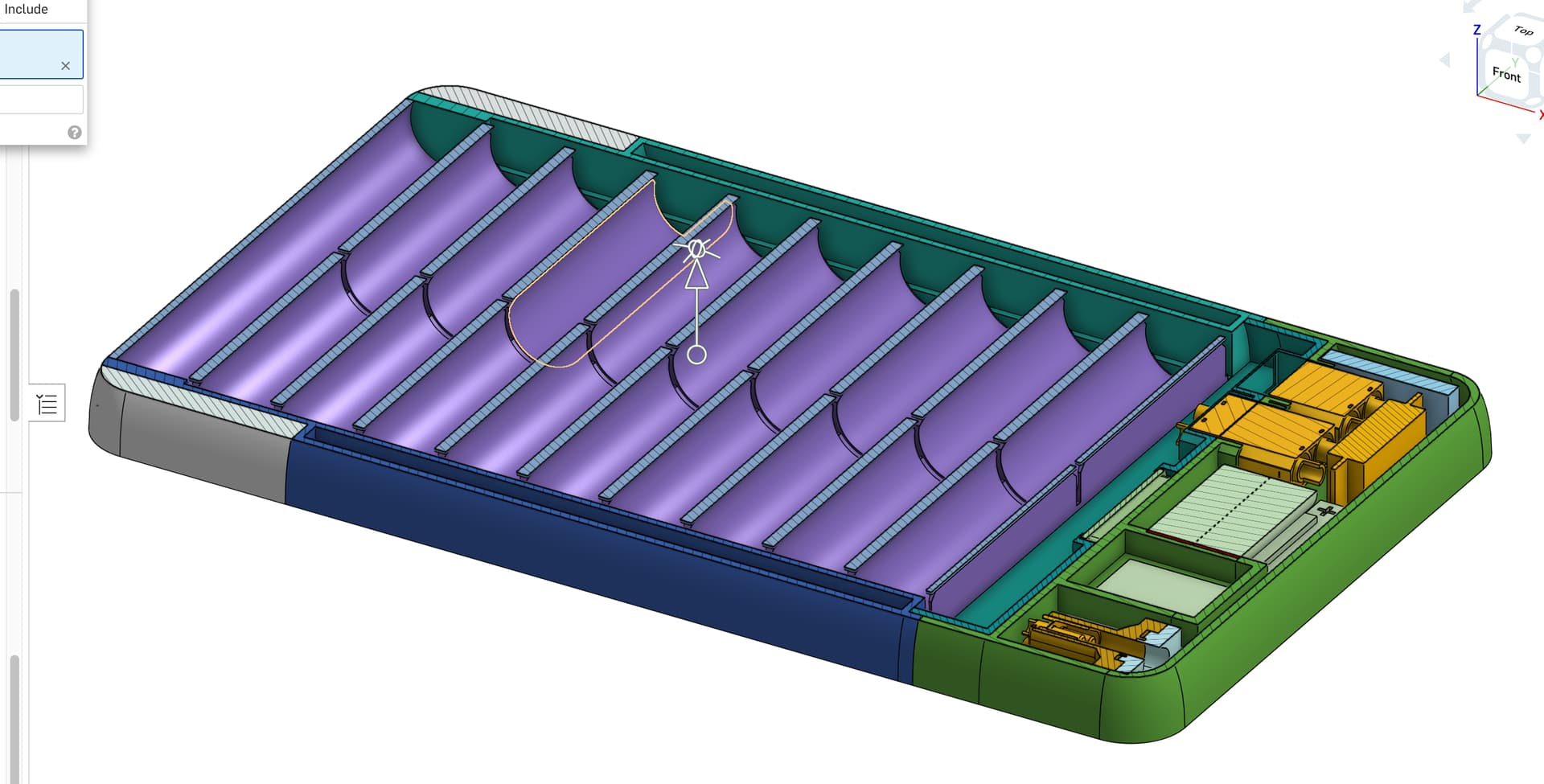
Brushless Motor: 6384 or 6374 with ceramic bearings
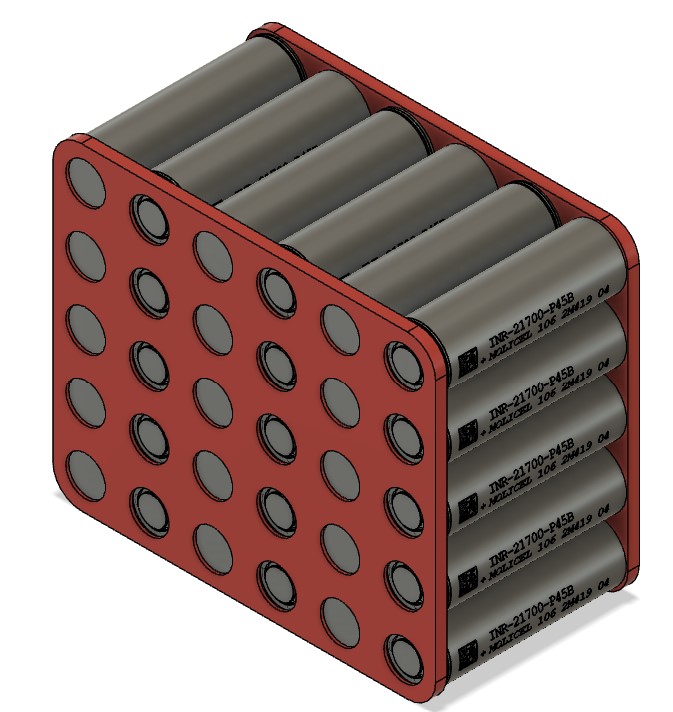
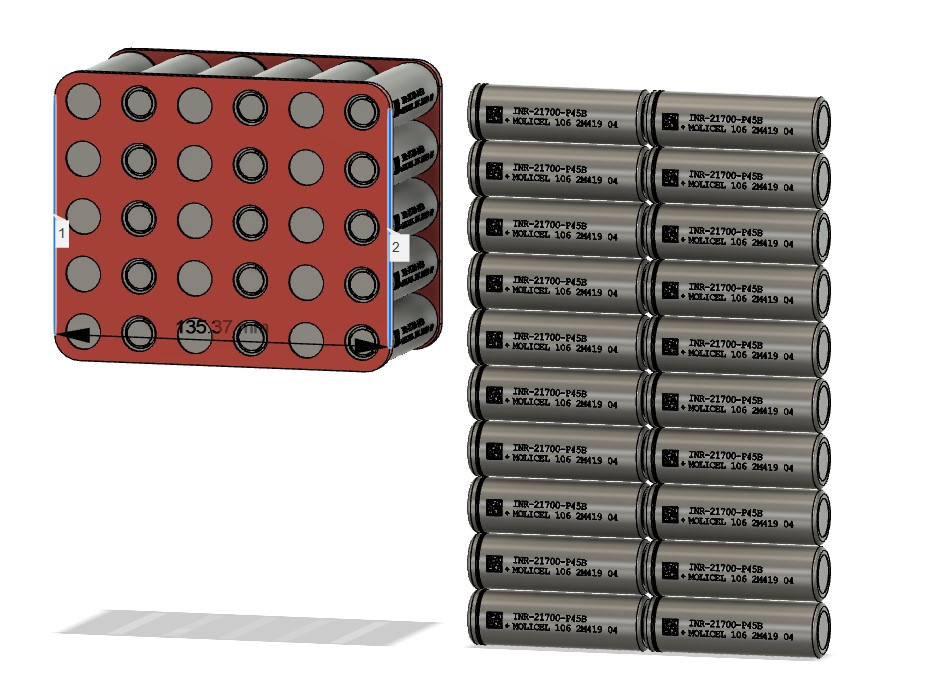
Battery: 36V 463Wh - 10s3p - Molicell P42A or P45B
Main block diagram
For motor controller I used the VESC 75100 connected to my custom receiver of the TecnoFly remote controller. The receiver’s processor stores many electric datas on the internal SD Card every second during the ride.
This is very important to figure out the performances or issues on the system but also the improvements of the use of the assist system.
Firmware upgrade by wifi directly from the server
Thanks. It will be a great adjustable option for motor mount.
Will you make a video how to use it - it will be more clear. Thanks. I am subscribed already to your youtube channel
Hi,
you can find more info on my web site : www.foilassistproject.com
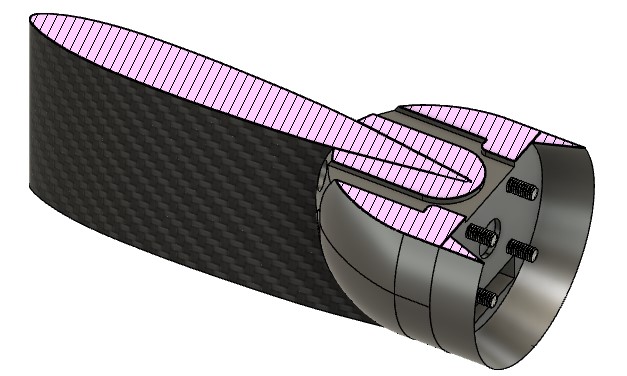
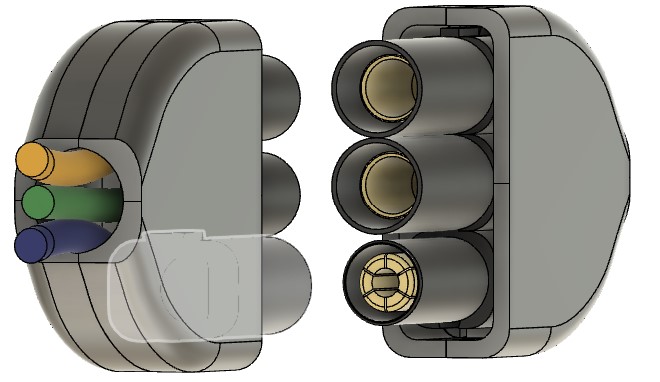
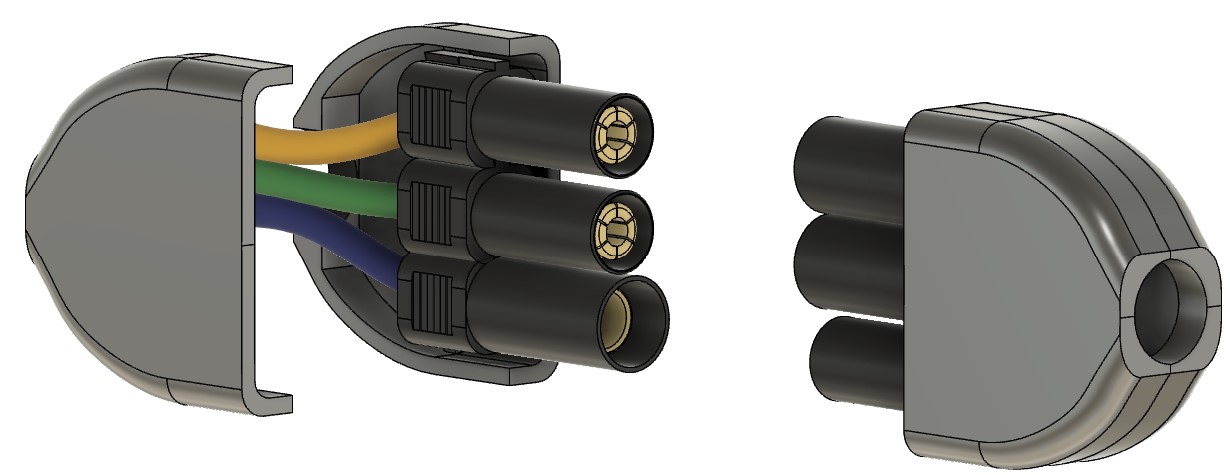
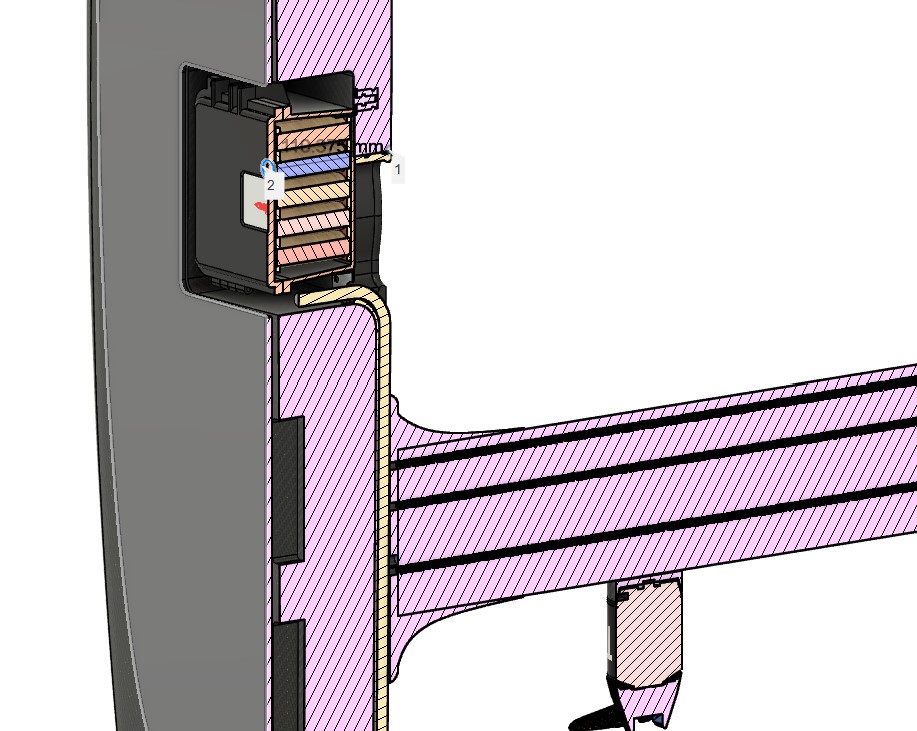
Actually the connector is not really waterproof, but using dielectric grease is working fine. The contact is really strong and work fine at motor’s current up to 70A
After soldering I close the connector with epoxy resin
I have a plan to complete it with a seal very soon
I’m considering adapting this design to fit within the board structure, and I have a few questions:
How much time such a work takes - to create a space for a box in the board?
Are these dimensions suitable for inserting into an existing board?
What’s the optimal design approach? What would you do?
The goal is to use a compact ~50L board that’s versatile, including pumping. The box should be at the center of lift. Undecided on replaceable batteries.
For context - I’m new to board rigidity concepts. Initially thought of an add-on system, but now considering in-board placement might be better.
I think the design of the battery is one of first decisions in the project, than the box and its position.
Your approch is thin battery for thin board, this means compact board less than 50L for sure. My smaller board is 43L (4.5’ x 22") with the same box.
Electrical observation:
In your design the battery pack is 10s2P (21700). I strongly suggest 12s2P, less current for two pack in parallel to get a good trust for take off (motor 120KV)
I suggest BMS inside.
mechanical observations:
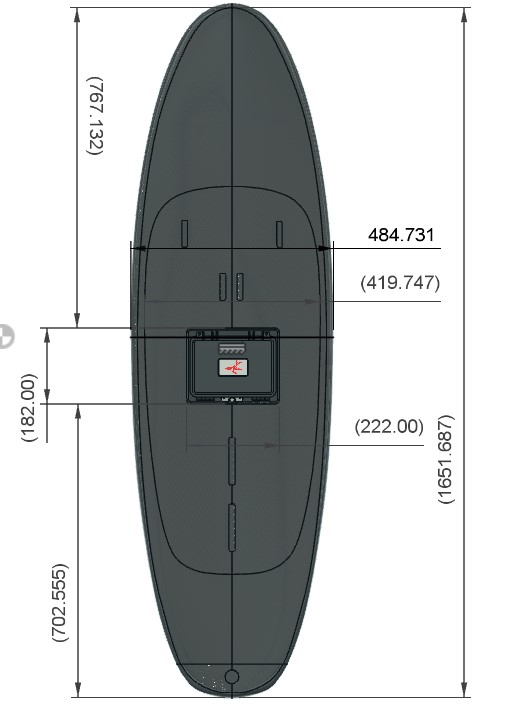
The dimension of your case are suitable with a board integration structure. No problem
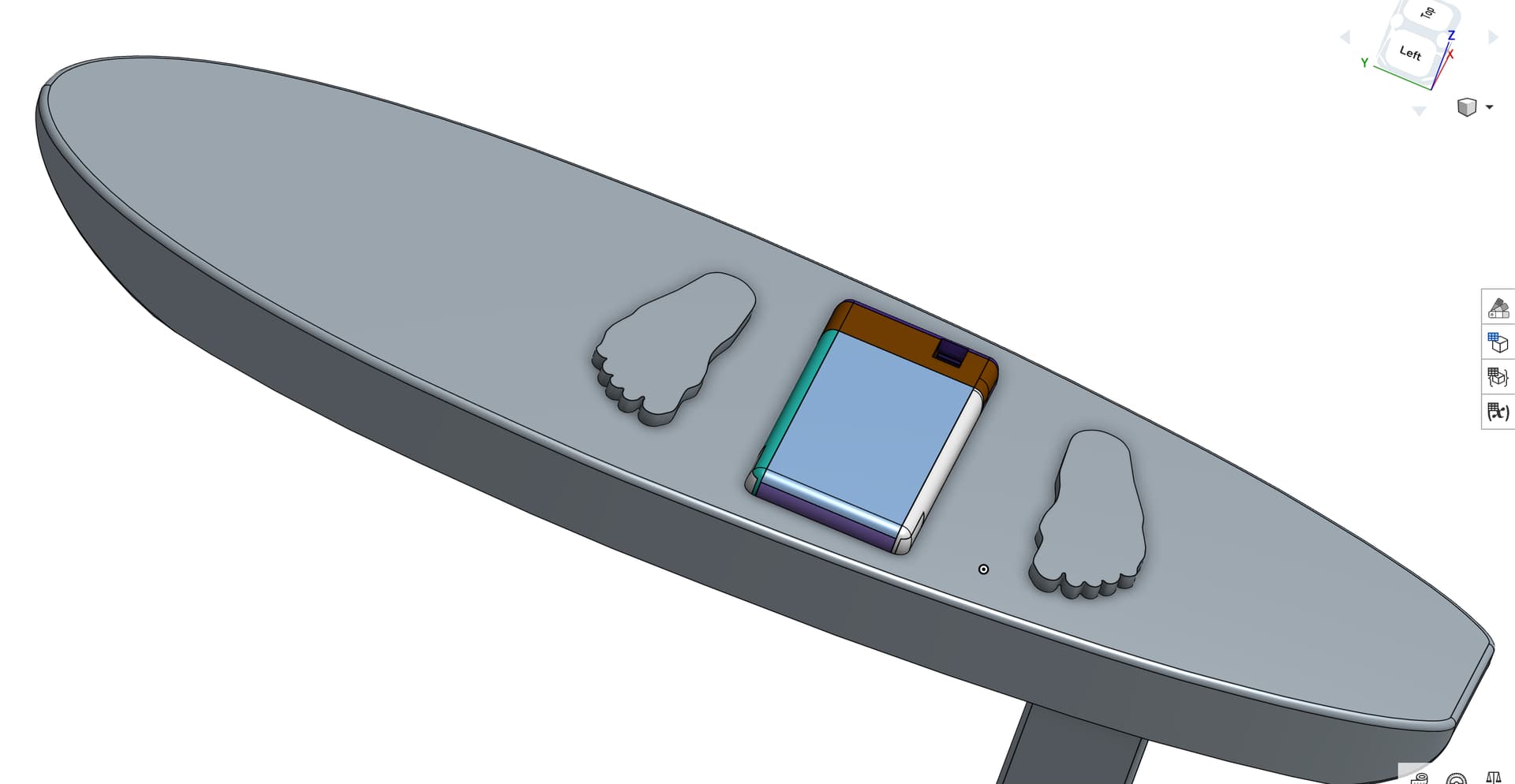
The battery case must be waterproof to change it on top of the board (very difficult) and big surface, not perfet condition for the feet
The battery is planned to be on top of the board, and placed sideways 30cm wide (34cm if 12s), meaning the battery takes only 17cm between the feet. The minimum stance is 35cm distance between the feet. If the battery enalrged to 12s3p , it then will be 25cm long. Do you think it is a problem to stand?
Thanks.
In case the battery placed inside the board the orientation is changed to length wise.
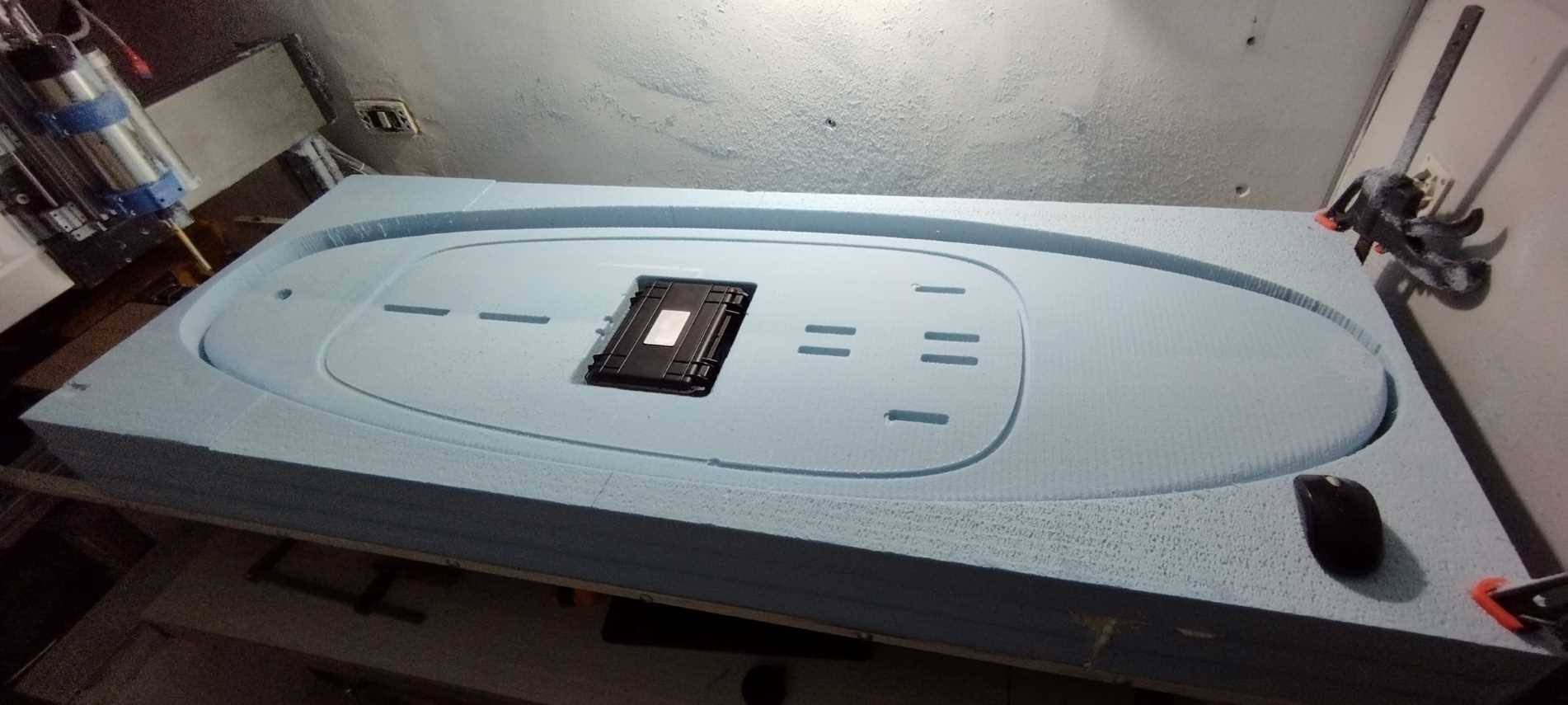
My procedure for a board building needs about 35 hours of work
Battery’s box position stay close to the mast rails
The board is ok for pumping and downwind