If you use the motor wizzard, you do not need to set the motor spin current, it chooses everthing depending on the motor you select. Under “general”, you can set the current limits for motor current, battery current, abs max current and brake current. Those are important, max motor current should not be higher than what your motor is rated for, but not too low to get enough torque for takeoff. For a 63100 motor I set motor current to 150A, abs max motor current to 180 and battery current to 100. These values work well in my setup. For a 65161 you can probably go a bit higher (if your battery can deliver the current).
Oh yah sorry I should have been more clear - I ran the setup wizard (with the appropriate max motor currents) and the result was 1500 watts max output followed by something like electronic “backfires.” Glad yours worked tho!
Today I have successfully tested on the sea flipsky 75200, version with water cooling case, remote vx1, auto detection big inruner, FOC mode, 99 duty cycle. It is big diference from my previous flier 400a. It’s very quiet and it’s easier to control it. I tryed to record vesc log on phone but can’t t find file. Do any know how to properly set location for log file on vesc 3.0 android…
1 Like
Update on our new combos. They worked very well now.
2 Likes
Just reading this post… I have a 75200 I purchased last September. Never manage to get my motor runing above 100A. The 4x resistors are all 1.9ohms. Is this the issue described? Anoying Flipsky didn’t recall the units
if it is a known issue.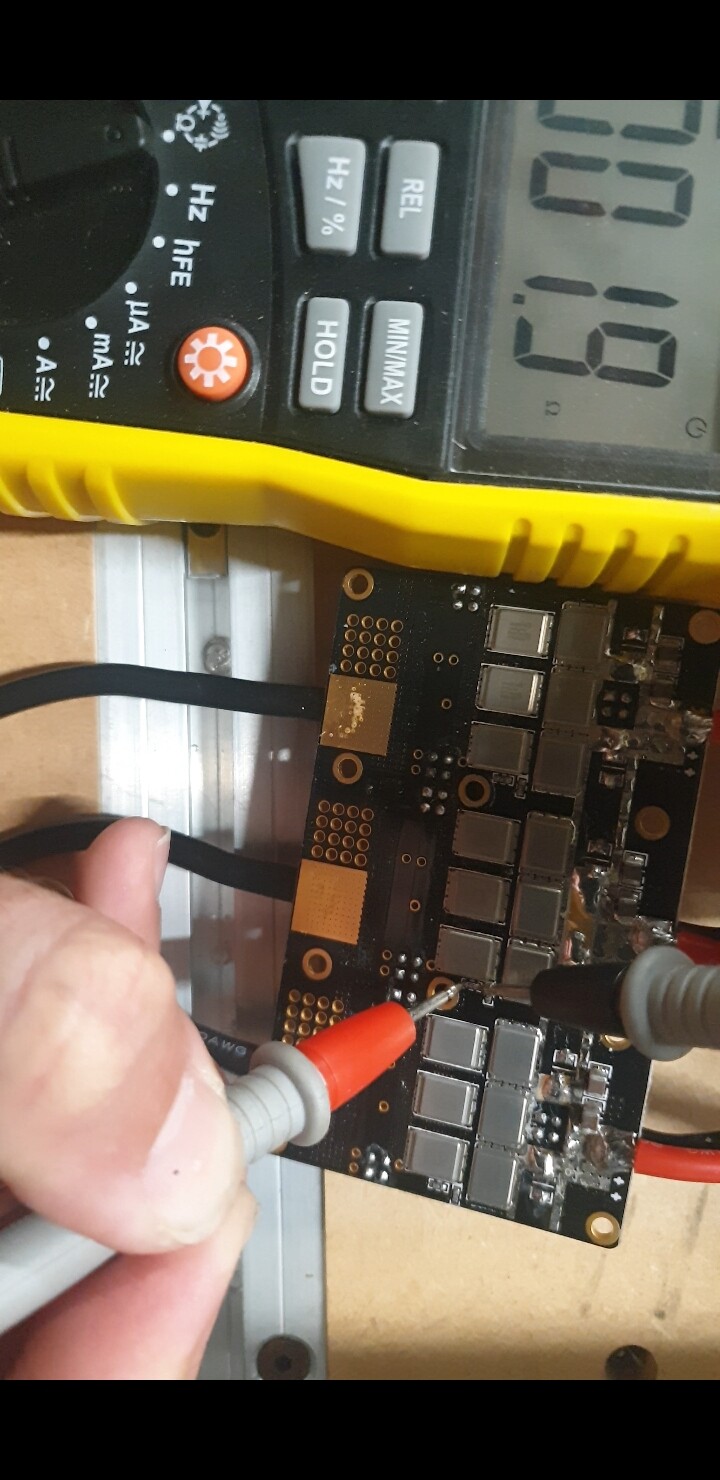
Yes it’s the issue. I just got my replacement, motor detection is far better. I have no results in water so far
1 Like
I contacted Flipsky they answered the resistance is correct, that it is 1.9ohms as supposed to be. Can someone measure the resistance of the resistor on a late unit?
Hello,
Ihad the same issue- I didn’t get it to work under load- the motor starts “Coging” when reaching 50A.
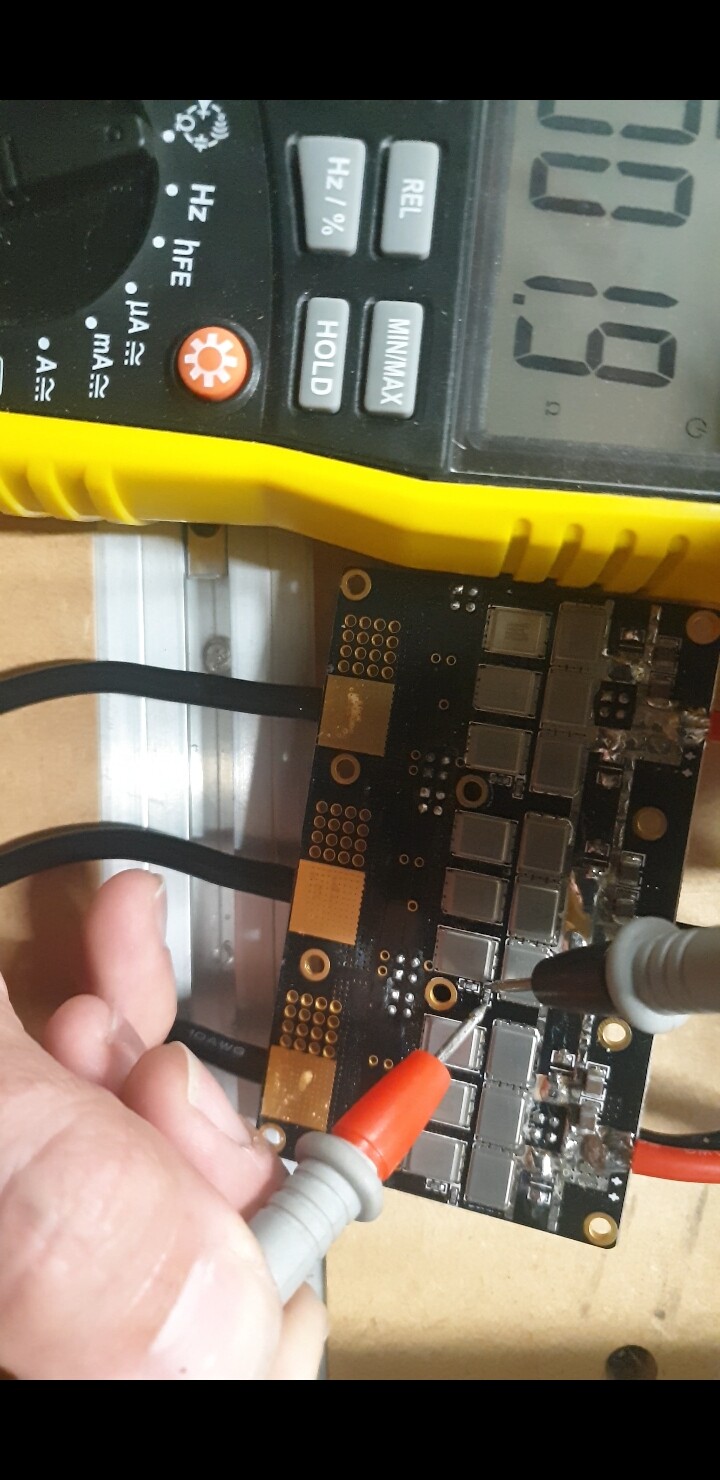
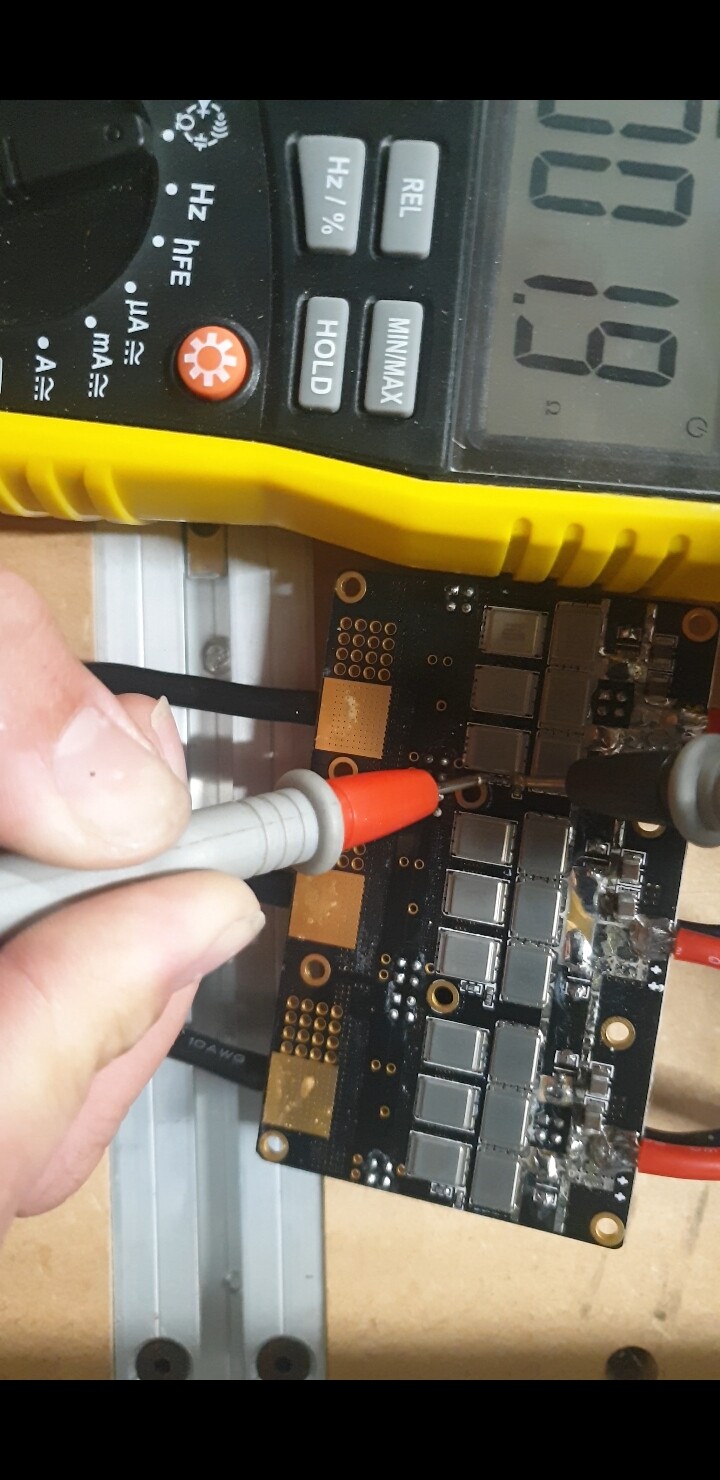
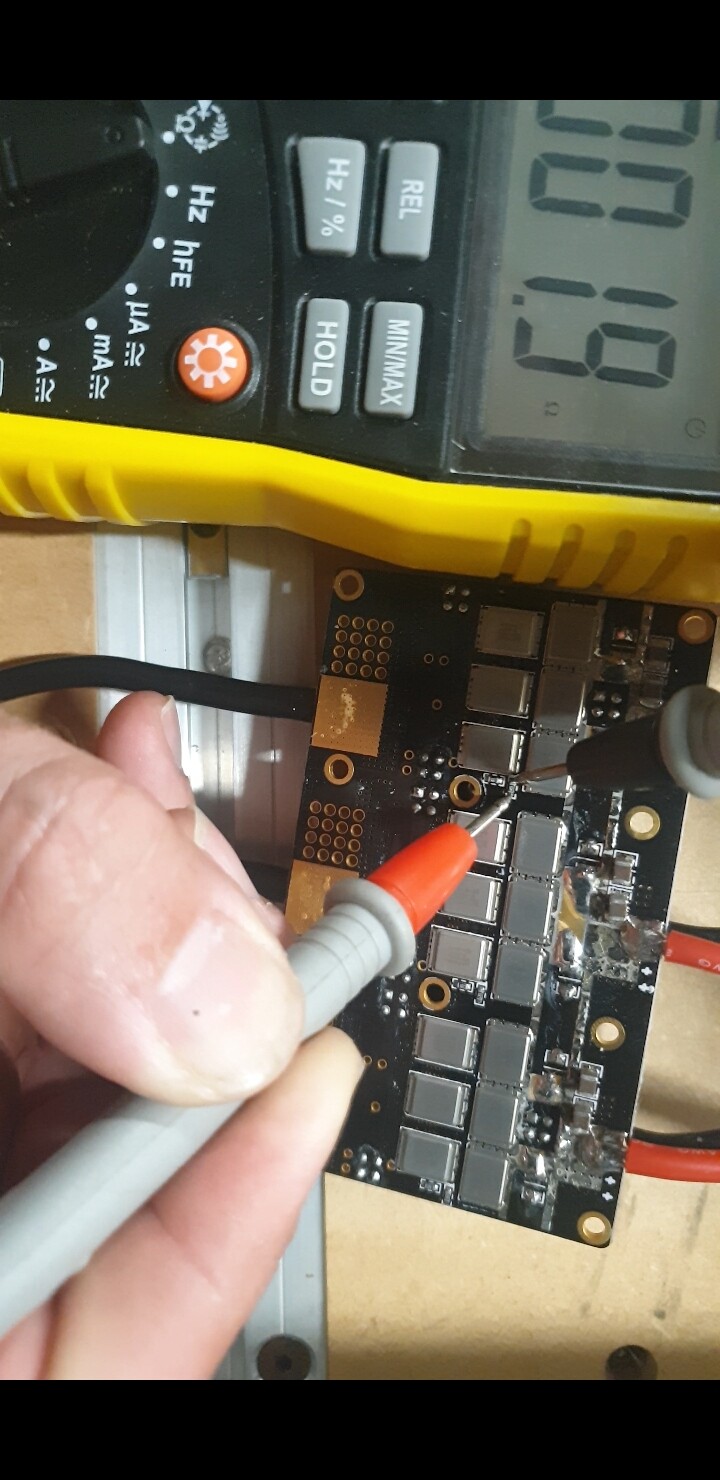
I decided to open my ESC and see if the resistors are correct-all 6 was the wrong ones 1.6 Ohms instead of 4.7 Ohms. I replaced the by myself.
My ESC is the waterproof version so it was a hell to open it and seal with silicone in the end.
Now it works fine with lots of power.
Flipsky don’t want to take responsibility for the mistake. wont buy from the again for sure!
4 Likes
This is disappointing! I thought these guys at Flipsky were better than Maytech. How did you learned it was supposed to be 4.7 ohms? Would be great if someone with a new unit could measure the resistors. Would be hard for them to deny it then. They’re adamant the correct value is 1.9ohms.
I just got the replacement. Before it was not possible to run it, it had low resistance 1,x. I cannot speak for the replacement because it’s potted, but works ok. I ordered via banggood, complaint handling was excellent.
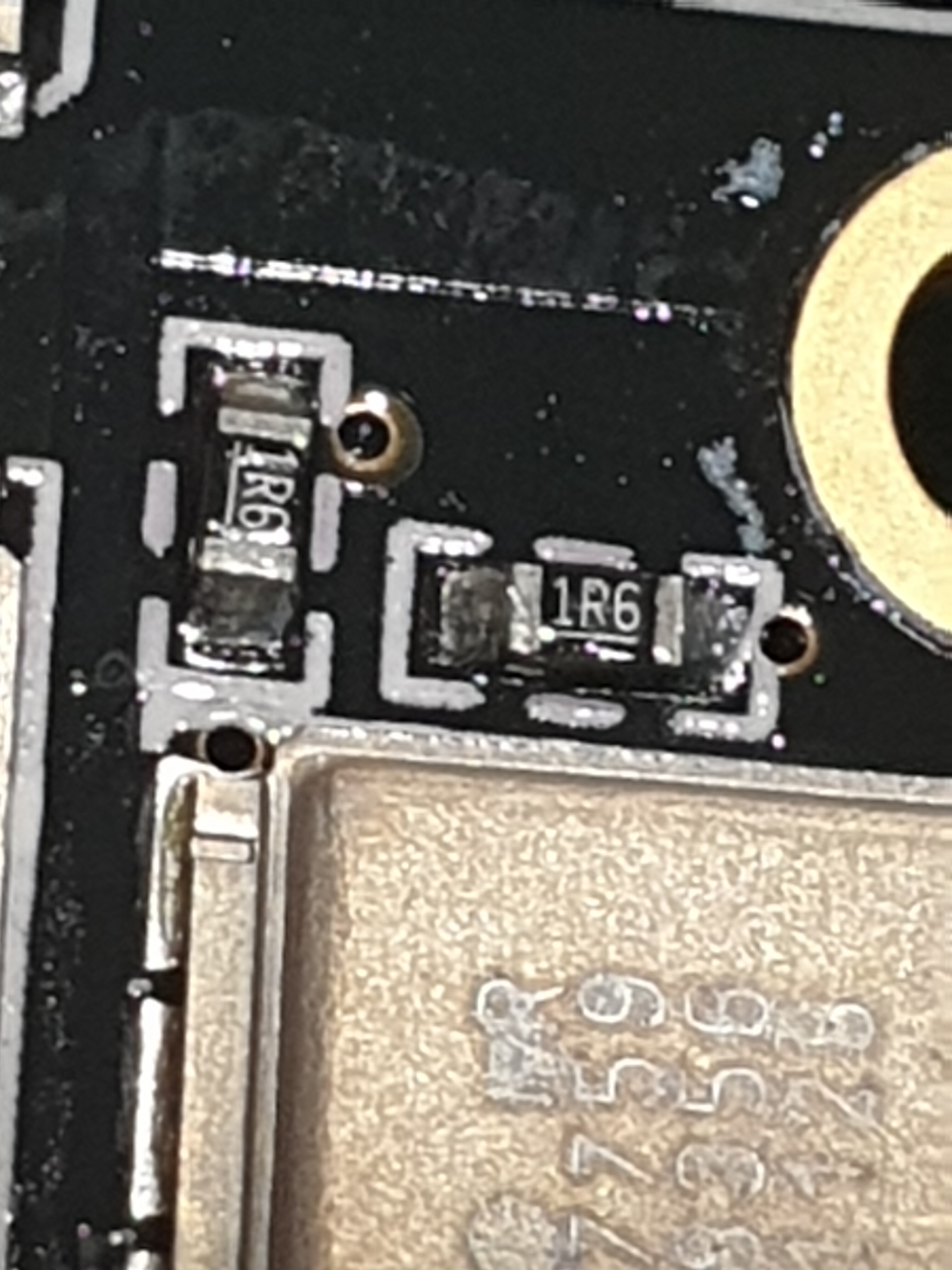
Managed to take a pic in macro. The one on my unit are 1R6 1.6ohms, my multimeter is reading a bit off.
follow up on this, Flipsky is coming back with some BS excuse that the 1.6ohms resistors work on the first 75200 version. Obviously they don’t. I thought Flipsky was better than Maytech but it seems they are just as bad… if they don’t replace this unit it will be the last product I’m getting from them.
1 Like
They are just a reseller, no different to Maytech in reality…
1 Like
Yep and just as bad with after sales service.
1 Like
I use to build VESC V4.2 for the E-Skate community few years ago- That resistor should be 4.7ohms and its super important for the BEMF calculations
Did you anyone figure out the physical size (package) of the resistor? Need to order a few. Thanks
Hi,
I got one potted 75200 and the motor detection was awful. Also the motor did not spin properly in air:
I got it replaced via Banggood without any stress and Flipsky confirmed this design issue. I opened up the original ESC and found the resistors to be 1.6 Ohms. For the new one I do not know, since I want to keep it as it is and not open it. What I can tell is, that the motor detection works flawless and also spin in air and water works.
Now the BUT: I see an ABS_OVERCURRENT failure at around 80% duty.
At this point the motor current is quite low (60-100amps; at start I have peak to 160). So the failure is maybe due to a tracking issue. Coming back to your BEFM statement, I do not see any BEMF signal in the VESC tool, therefore I am not sure if the 75200 supports this at all.
Actually I would like to take the chance and ask the community if someone is facing same syn issue resulting in abs_overcurrent? There should be ways to tweak via vesc tool, any suggestion is appreciated.
Stay cool!
Have a look here. Not sure if it is what’s happening in your case but seems people having cogging issue at higher current solved the issue “reducing observer gain by almost 70% and “observer gain at minimum duty” from 30% to 15%”
Someone also recomend to run detection once motor warmed up (not sure if that apply to us, we have better cooling than esk8…)
My next VESC will be a Trampa. Realized you get what you pay for the hard way. Flipsky warranty on electronics is 2 months… Trampa seems to offer a great after sale service support with a 6 months warranty. I would have saved money and time getting a 75/300 straight away.
1 Like
I think my issue is more rpm related rather than current. Nevertheless let me try to play around with these parameters anyway even though I have no clue what they mean 
We should not forget that trampa support is not perfect either. Also those trampas are really allergic to water I like the potted water cooling Flipsky since it meets my board design quite well.
Sorry forgot the link https://vesc-project.com/node/1389
Seems for them it was happening at low speed, high current