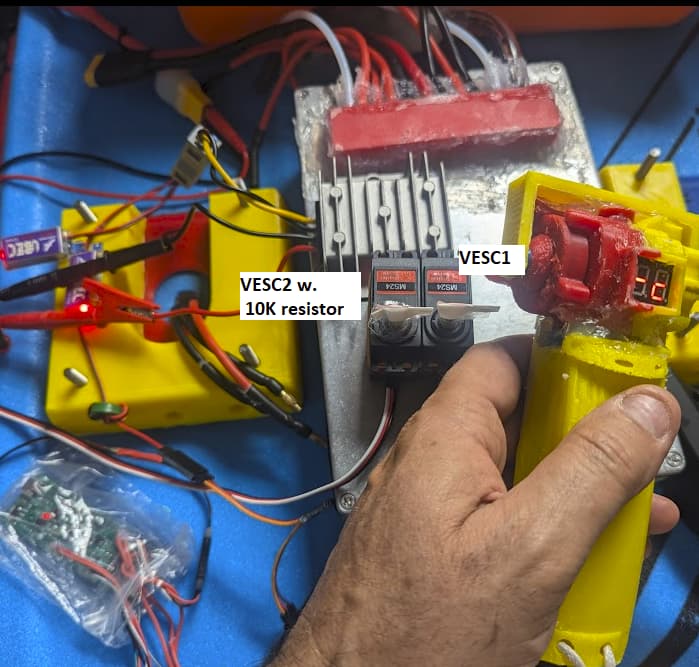
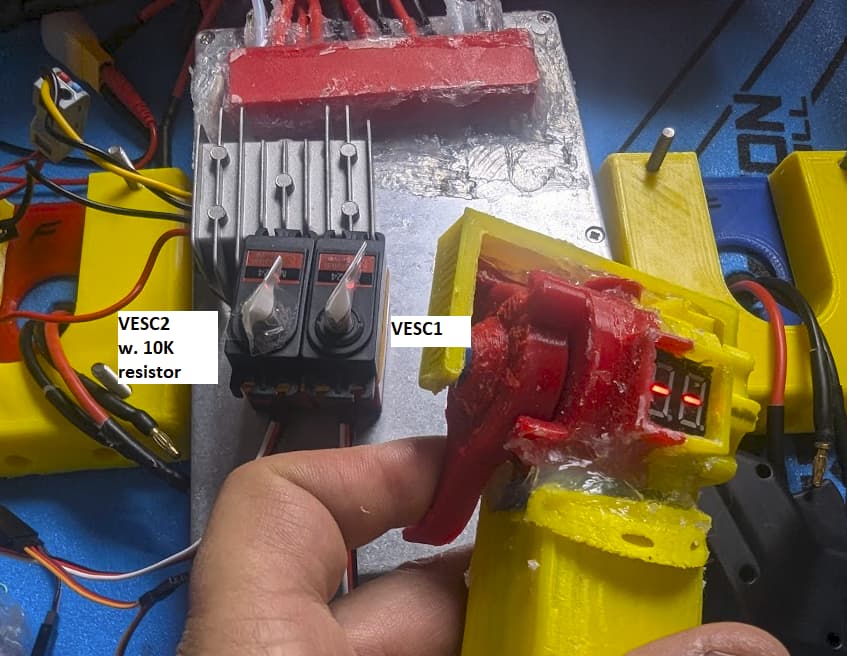
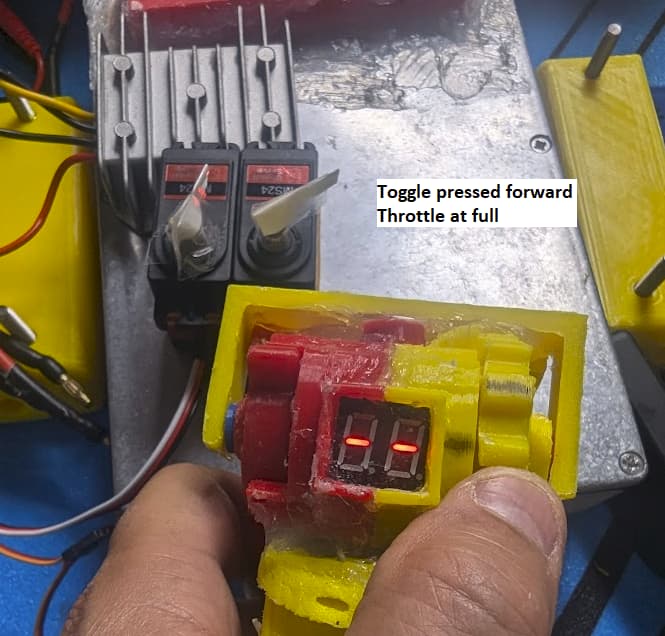
Hi everyone, I’ve finally converted my Tow Boogie to a differential configuration, but I’m encountering an issue. Regardless of the ESC or VESC I use, the differential toggle isn’t functioning correctly. The throttle works as expected for both motors (though I haven’t tested it on water yet), but when I push the throttle and flip the toggle switch up or down, only the motor connected to VESC1 (as shown in the image below) turns off. The motor connected to VESC2 only changes speed based on the throttle position.
I searched the forum to see if a similar question had been posted before but couldn’t find any, so I created this new post.
I tested my setup with servos and a BEC, but the issue persists. Before I start randomly changing settings and testing, I wanted to post here to see if anyone might know what I’m doing wrong.
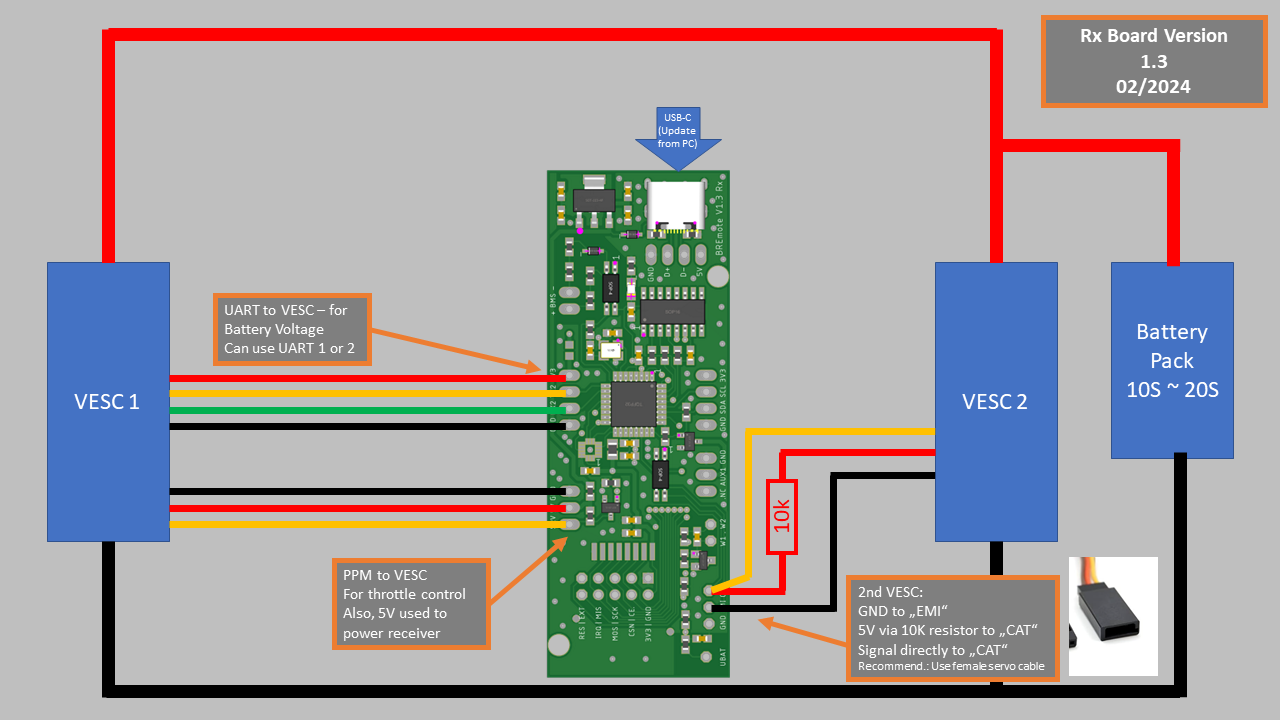
My setup follows this schematic from @ludwig_bre on GitHub. No BEC is needed for this setup since the VESC supplies the 5 volts, but I’ve also tried using a FlyColor ESC with a BEC and encountered the same results.
Additional details:
I am using the Bremote 1.7 default configuration with a few modifications: Steering is enabled on TX, with No Lock, No Gears, push throttle to power up, and start gear set to 9. Please see the code snippets below:
#define STEERING_ENABLED //If steering feature is enable (see also fine tuning at "Tx Specific")
//#define REVERSE_ENABLED //Puts remote into reverse mode: Only two "gears": Forward (F) and Reverse (P)
//Important: Also update RX! Otherwise in failsafe the VESC will be sent wrong commands!
/*
* Tx Specific
*/
//Behaviour of the User Interface
#define NO_LOCK //No locking function, as soon as remote is on, throttle is active
//#define NO_POWERBUTTON //The toggle button cant turn off the remote (the remote will power off automatically if the receiver is off for > NO_ACTIVITY_TIMEOUT (see below))
#define NO_GEARS //Gears can't be switched (set STARTGEAR to 9)
#define THR_TO_PWRUP //If throttle also needs to be pushed to power the remote (helps if remote turns powers up on its own)
//#define DONT_SEND_IDLE //If the remote should send packets in idle (no trigger applied), contiues for a short time set by TOGGLE_BLOCK_TIME
//Useful, if 2 or more people have one remote each and control the same towboogie
#define STARTGEAR 9 //The gear that is set after poweron or unlock (0 to 9)
#define SHOW_TEMP //If display should also show temp (alternate btw. temp and bat) or only show bat
I did not make any other modifications on TX, frankly I am not sure what to change.
The Receiver setting is as follow:
Under SHARED_CONFIG.h:
//Output Debug Information
#define DEBUG
//#define SERVO_STEERING_ENABLED //Servo Output on Aux1 (Modification needed, email me)
#define DIFF_STEERING_ENABLED //2nd Motor Output on Aux1 (Modification needed, email me)
//#define REVERSE_ENABLED //Puts remote into reverse mode: Only two "gears": Forward (F) and Reverse (P)
/*
and under Receiver BREmote_Rx.h file:
//Diff steering
#define STEER_AMOUNT 1
//Analog
#ifdef SERVO_STEERING_ENABLED
#define EN_AUX1 A1
#define EN_AUX2 A2
#endif
#ifdef DIFF_STEERING_ENABLED
#define EN_AUX1 A2
#define EN_AUX2 A1
#endif
Any help or guidance is greatly appreciated. Thank you.
Sean
P.s. I searched the forum but did not find answer to my question,