You probably could get a setup to work with 500w. It would however, be slow. Power requirements grow exponentially with speed. How fast do you want to go? Im looking for 40kph.
40kph is really fast ! No?
I think its about 20 Knots. It might be a little ambitious 
I haven’t finished building mine yet. Time will tell. I ride my kite foil to about 30 Knots which does feel very fast, so 20 is a good goal I think. I better make it 15-20 Knots 
I’m planning on getting up on the foil at really low speed ( 8-10kph) and max speed of 25kph which, of course, will need more power. However, I think that having a more efficient setup is achievable and will have drop the prices down (passive cooling of the ESC, direct drive, smaller batteries)
@Winging_it
Hi Dan,
I very much enjoyed your work with the flume and your detailed explanations and results, thank you!
As I’m interested in also building a flume (while I don’t know, if it will come to happen) I have questions about some points. It looks like you have used a long propeller shaft situated in a long tube that is fixed at the flume. In order to measure the thrust, the shaft must be able to move a bit in axial direction. Therefore it is not appropriate to use ordinary bearings to bear the shaft. You will have used some lubrication between shaft and tube to prevent water from outpouring, right? If so: was it water, oil, grease other stuff? Did you use seals or other means to prevent leaking? What were OD of shaft and ID of tube?
Thank you in advance for your answers.
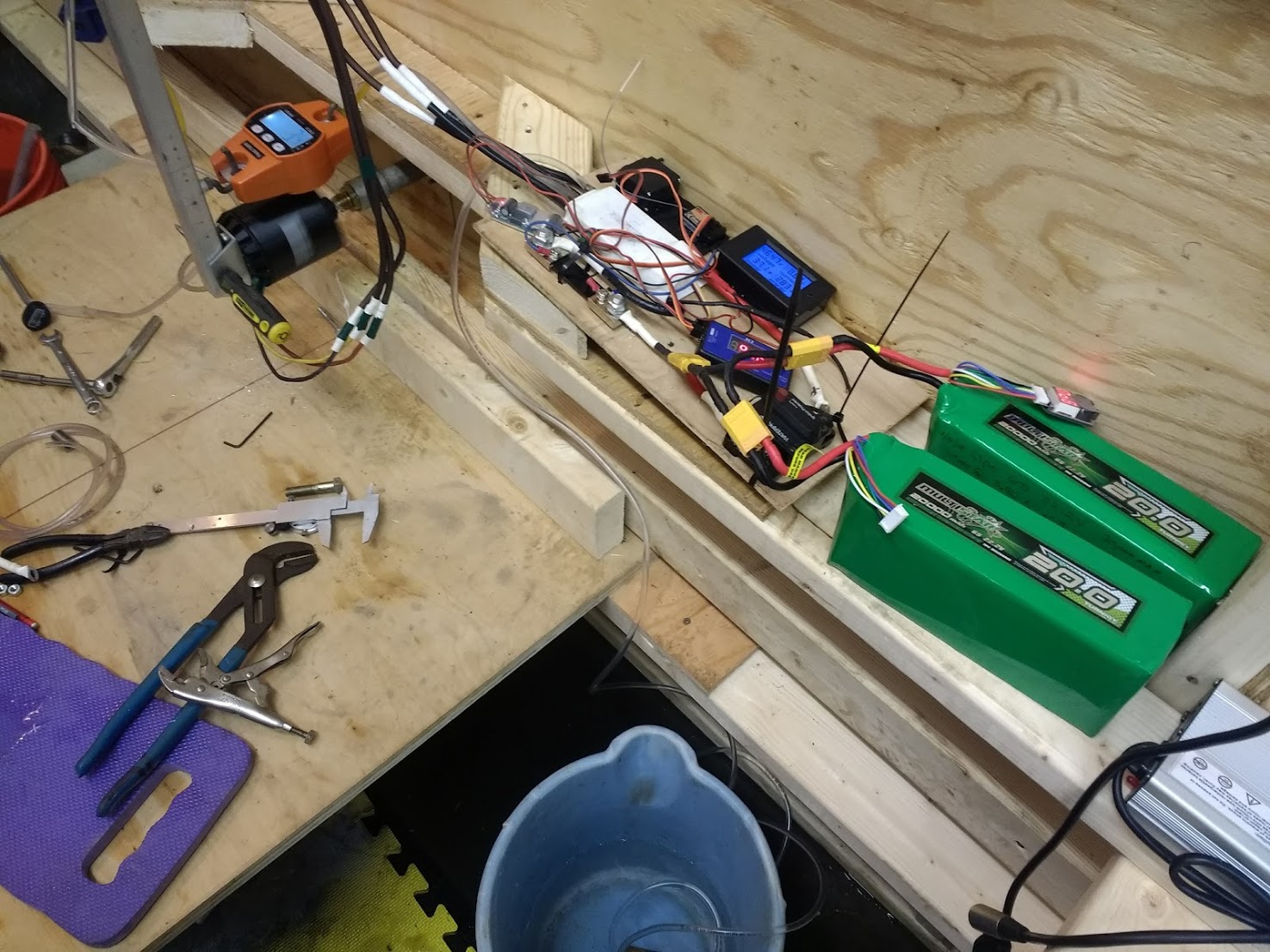
I don’t know how Winging_it did it. This is how I did it.
I replaced the shaft that came with the motor with a shaft about 3 1/2 foot long. 12 mm shaft.
I printed a part in white plastic that held a needle bearing cage with needle bearings. I think I bought it from McMaster carr. I also installed a seal in the white printed piece to keep the water out. That white piece threaded on to 1/2 NPT pipe. On the outside of the tank you can see that the motor shaft passes through a brass colored part. That is just a brass adapter to go from NPT thread to a flair. I opened it up to 12 mm and I am using it as a bearing to keep the motor centered. It worked very well did not leak a drop for months. The tank was 6 foot x 8 foot x 4 foot deep. It also took up so much room I had to disassemble it.


2 Likes
Hello Heimfried,
Glad you enjoyed the flume work.
The shaft bearing was a simple nylon sleeve type. It allowed the shaft to slide and did a pretty god job sealing the water. I think I used a little bit of petroleum jelly as a lubricant and sealing media for the shaft bearing/seal.
I believe the shaft was 12mm in diameter to match the motor shaft. I don’t recall the ID of the tube, but I think it was about 1/2 and then I drilled it to accommodate the nylon shaft seal/bearing.
If I were to build another flume, I would add another motor and prop to help get the water moving faster in the flume’s test section. I had a boat speedometer in the test section of the flume but it never read more than about 5 mph. I think testing at cruising speed is really important for getting a god motor/prop combination. Just putting a propeller in a big water box will not do a good job measuring the prop performance at speed in an “unloaded” condition.
Good luck with your flume.
Dan
1 Like
Dreaming on a larger scale, wouldn’t it be great to have a powered flume large enough to allow testing of complete hydrofoils/efoils in addition to the power systems. This could really help in the refining, performance and duration of an electric hydrofoil.
Thank you. I mostly built it because I really had absolutely no experience with these high performance motors. I never even heard of a out-runner. I never hear of a Flume either. I wanted a way to run the motor hard and monitor everything. I wanted to make sure that when summer came I had something that would not burn up. If your motor does not over heat in your flume tank it probably never will because the motor is fighting against still water rather than the fast moving water it will see in the real world application.
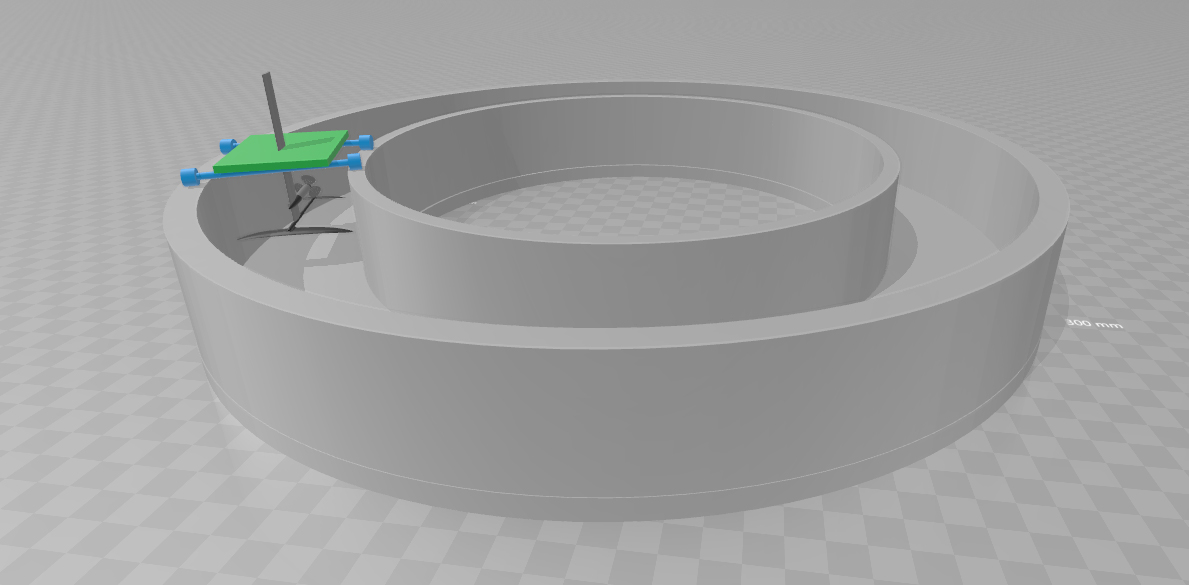
I always thought u 2 would make flume v2.0 for futher testing and i always thought it would look something like this  Could this actually work? Weight scale (for lift) esc batteries etc on top of thiis green crap (which should be heavier than rider and board weight), anchored in the center (which i forgot to put in) to circle around? Maybe 1 or 2 motors iin the canal to simulate “flying speeds” but this is awful lot of water volume. Maybe a gas outboard?
Could this actually work? Weight scale (for lift) esc batteries etc on top of thiis green crap (which should be heavier than rider and board weight), anchored in the center (which i forgot to put in) to circle around? Maybe 1 or 2 motors iin the canal to simulate “flying speeds” but this is awful lot of water volume. Maybe a gas outboard?
If some1 has 2 broken pools, 1 smaller 1 bigger… 
1 Like
That would work. I was thinking the same thing about using an outboard motor to power the water in the flume.
A few things I would do differently from what you have shown (if I had a place to build a flume #2) are:
- straight section of flume for the test section
- Widen the test section. If the wing tips are too close to the walls, induced drag will be greatly understated.
- Instead of the cart you have shown, I would use a long horizontal pivot arm attached to the top of the mast and anchored in front of the foil. I would add weight = to the flying weight to the top of the mast. This way lift is aways = total weight lifted by the foil, drag is the pull on the arm (efoil power off), power required for flight at any particular speed determined when pull on pivot arm is zero.
- You mentioned, but not shown in your drawing, an independent motor/prop to power the water in the flume and control water speed.
I don’t have cad drawing resources available. Would love to see someone do a nice rendering of some good ideas for a really good flume.
Wouldn’t it be great to have a good flume to test and compare existing efoils?
Oh this was just a principle, took me way less time to sketch it than to translate to english how i would want to describe it. If i get some free time, will try to model something. And yes, a proper flume would be wonderful!
I plan to test propellers and wings here:

Depth 1 m, width 2 m, I don’t know the speed of the current, I have to measure. At this point it will be possible to measure the efficiency of the propeller and wing very accurately. The most important thing about a propeller is to measure thrust - g / W. I use a portable professional device for measurement.
2 Likes
Hi @Dynamik, This is fantastic plan. Thanks for sharing!. What props are you going to test? Please keep us updated. Efficiently is most difficult thing to achieve.
Here I will only post a few more photos when I am on the water canyon. But I must first make a detachable 2.4 m aluminum frame, which I will lay on both dams (similar to the picture from Just - see above).
I must first calculate the correct propeller shape for e-foil. But the propeller parameters (efficiency, thrust g / w) and its 3D CAD will be published in a different topic that is more appropriate.
The motors are interesting.
How to calculate the torque required to get the prop RPM and thrust required?
I am building a double jet drive with 50mm props using 790kv motors in direct drive, and I am not sure the torque will be enough to hit the RPMs required at the shaft. Using a 12s6p 21700 li-ion battery pack rated at 4.2a/cell, 43.2v. The motor outputs 7.77kw of power at 12s and 180a max amp rating.
I calculate that at 55a draw I get a HP of 6.4lb/ft and need to spin the 50mm prop at 10k RPMs to get a 259N force (58.3lbs). With direct drive, what torque do I get and is it enough using the 790kv SSS motors? Or do I need to reduce gears 2:1 or more?
Or buy better/torquier motors like yours?
Thanks
short answer: yes if your motor is 56mm type it will have enough torque (2.5-3nm) to spin a 50mm jet drive to 10krpm
long answer: 10k is not much for this size, i haven’t built a jet surf myself but i have done some work, and i would aim for twin 50-56mm jet drive with a 25k rpm off load (-30% on load)
taking a 43.2v battery would give (25000/43.2)= 500-600kv motor
if we want 10k rpm so about 13krpm off load using a 790kv , you will drive this motor only at 16v, taking your 55A (from the battery is suppose at 43.2?) 55ax43.2v= 2376w , this 2376w/16v= 148A on the motor , yes it will take it but overheat
2:1 or 3:1 gear would work , but addding complexity to the built, to me the best would be to get a ±360kv motor 56114 or 56123 type
match kv motor to the desired rpm according to the battery voltage
it is pretty hard to convert mecanical power , torque , thrust, heat loose…
Not sure I understand the 16v. I thought voltage is constant at 43.2v, and loaded at a 2376w that would imply the motor is drawing 55a.
I thought about the 56114 or 56123 but as it is the 56104 is rated for 11kw and I figured that at 790kv I’d only be tapping into 70% of the power, as 43.2v*180a max draw is only 7776w. But I am not exactly 100% sure how this all ties together, it’s like a splinter in my mind, driving me mad, not being able to see the whole picture. Also costwise, the 104 are $100 around and the 123s are twice as much. What is the benefit I am not seeing here?
So here’s what I got so far:
case 1
The max HP at 70% of max W for dual jet drive is 20.86 ft/lbs/s. With a motor RPM of 34,000 (79043.2) in direct drive, that gives a total torque of 3.21 lb/ft (T= (5252 * HP) /RPM or 4.35nm. At max amps of 180, total wattage between the 2 motors is 15.5kw. Loaded RPM as you put it would be 23.8k (34k0.70). Given a displacement of 204.05lbs, KTS would be 72, or 83mph. With cavitation starting at 36mph, max thrust of 380N, a prop of 41mm, and pitch of 79mm, pitch ratio of 1.91. 2 bladed props.
case1b:
same as above but dropping gear 2:1, shaft RPM would be half 17k, torque doubles to 6.42 lb/ft, prop diam is now around 50mm, and pitch 124mm, pitch ratio 2.56. Cavitation starts at 55mph now. I could push cavitation to 69mph if I had a 4 bladed prop instead of 2 with the increased blade area.
Case 2
Changing to 360kv, max amp is 95, 43.2v.
The max HP at 70% of max W for dual jet drive is 11 ft/lbs/s. With a motor RPM of 15k (36043.2) in direct drive, that gives a total torque of 3.72 lb/ft (T= (5252 * HP) /RPM or 5nm. At max amps of 95, total wattage between the 2 motors is 8.2kw. Loaded RPM would be 10.5k (15k0.70). Given a displacement of 204.05lbs, KTS would be 52.3, or 60.2mph. With cavitation starting at 39mph, max thrust of 270N, a prop of 58mm, and pitch of 127mm, pitch ratio of 2.2. 2 bladed props. Taping only into 37% of top wattage the motors are rated for, leaving a lot on the table by the looks of the math.
I am not sure how the theory applies in real life though. By looking at this video https://www.aliexpress.com/item/4000643150931.html
The jet drive looks so powerful already. It’s a 790kv motor 50mm jet at 6s
Anyway, I am thinking I definitely don’t want to go above 50mm, as my surfboards thickness is about 3in, so the 50mm jet drives would be nicely flush. The 2:1 poses some complexity. The planetary series gears don’t seem to handle more than 7k RPMs so that seems out of the question. Someone in another post posted an interesting gear reduction motor mount that would be quite minimal, but could not find much about it, and works with a belt.
Ideally I’d just use the 790kv motors. In my limited understanding, the 360kv look like would leave a lot of HP on the table as its capped at 95a.
I could drop the volts down to 6s for 790kv motors for a max rpm of 15-17k or increase V to hit that 25k RPM you suggest.
How did you figure 25k is a good RPM for 50mm twin jet drive?