Hello,
I have been doing research and development for many years to increase the efficiency of propellers (and impellers). Nowadays I know everything about propeller hydrodynamics, I can design a propeller for each craft and for each drive.
But for e-foil, unfortunately, you can not get a highly efficient propeller because it is not produced anywhere.
Boat propeller is not suitable for e-foil because it has low efficiency - inappropriate blade shape, incorrect blade number and sometimes inappropriate hub shape.
The high-quality e-foil propeller must be made of metal. Just good aluminum. The plastic filament used for 3D printers is therefore completely inappropriate for making the propeller. The water pressure would bend the blades very easily, which reduces efficiency.
This topic is to make it easy for a company to start a propeller in several performance types and at a favorable price. Unfortunately, quality propellers can not be produced in domestic conditions. One company is able to cover the need for all e-foils around the world.
Nice to hear from you, i appreciate help for my basic project to propell a windsurfboard.
Can you also find a optimized shape for the duct together with the prop?
Can you show us how to do this? How to set up simscale with a “standard” model?
That would be interesting.
To MaxMaker: This is very good news that you can machine on the CNC. But I must point out that the propeller for the e-foil is designed according to how the output shaft of the gearbox has the torque at the highest RPM.
To PowerGlider: This topic only applies to e-foil propellers. I created the theme only because e-foil needs the propeller (impeller) that is the best in the world. For the drive I see in the photo, it is necessary to create a new theme. According to photos where I see the red propeller, I think everything is wrong - the shape of the blades, the number of blades and the diameter of the hub. This type of drive is only suitable for fishermen somewhere on the quiet water of the pond when it needs to switch the drive direction etc …
To MaxMaker: I suggest that you measure the torque of the gearbox at the highest RPM of the engine. You have three options:
first option: Ask the small motor manufacturer to measure the torque of the gearbox
second option: If you have a 3D printer, make a device for measuring torque
third option: torque I measure myself
To Just:
Yes, the best propeller is one that provides the highest efficiency of the gearmotor torque (or the motor if it is a current drive). Such a propeller can have the highest efficiency
for top speed
or for the stroke (acceleration - when the rider has a big weight)
or for races
The fishermen need the propeller to have the same efficiency in both directions of movement of the vessel. E-foil however needs a propeller that has the highest efficiency only for forward drive (no need for reverse drive at all). The problem of common propellers is mainly due to the fact that propeller manufacturers are very poorly engaged in propeller research, mostly copying the propeller from the competition. This is especially true for Chinese companies.
All outboards I have seen are optimized to go 1 way. Reverse performance is mediocre if not horrible. Do you have some data backing up exposed problem?
Maybe a cheap torque wrenche from ebay is already sufficient to measure the torque of the engine?
You would have to integrate this in the engine mount of your test stand, otherwise it will rotate. I did my motor torque tests with the cheap torque arm x kitchen scale method
You really thought i built a bow thruster? I thought you were kidding. I should have painted it black, so it looks male and more powerful! I built a direct drive direct cooling motor/prop. The hub is 63mm diameter to get enough torque.
Why do you need to measure it? Is it not good enough to calculate it from the motor constants or from the power? Especially measuring the highest torque at the highest speed will be hard. Do you want the maximum power point or what exactly?
Maybe we could wrap a string around the shaft and then let it wind up different weights until it cannot lift it anymore. A 100kV Motor would wind up about 1m of string per second.
You can get a decent enough estimate of motor torque with a simple calculation. There is always a constant for each motor that describes the torque output vs the motor current (not battery current). You can monitor this current with the Vesc and thus calculate the net output torque of your motor to the gearbox or in my case my impeller. You can calculate your propeller torque, If you estimate your gearbox losses (maybe as constant from the datasheet).
If you don’t have a reliable value for the amps/torque constant you can estimate it like i did or you can measure it with a few datapoints. This can be as easy as driving a small wheel with variable braking and a torque arm on a kitchen scale as I described in my last response (I used my lathe as variable brake for verifing my estimations below).
For the estimation we assume the output shall always be RPM = KV * InputVoltage * DutyCycle. It is not because of losses. I simply modeled all losses as resistive losses in the windings and modeled all other losses as if they were resistive losses. In other words I assumed that my equation above is only wrong because of resistive voltage drop in the copper windings. This got me really close to some measurements for a similar motors torque graph. From the graph you can see that the torque vs amps curve is straight. In addition the RPM is not constant, but drops with torque because of the losses. You can even get a nice estimate for motor efficiency If you measure the input power and calculate the output power with P=M ω using the troque/amps constant.
In summary my opinion is that measuring the motor torque in the application is unnecessary, because if you have a reliable motor torque constant your ESC outputs this value constantly (only hidden as motor current )
If you translate the RPM/V to rad / (sV) you will get the reciprocal value with Nm/A. Both values are theoretical values, you need the winding resistance and the magnetic losses (if you wanna be precise). The winding resistance you can measure by the VESC directly (double the measured value). The magnetic losses by hysteresis you can estimate by taking several points at different voltages and measure the no load current. I made the experience you get a good function fit with a exponent of 1.6 . Magnetic losses are typically a function of current=f(RPM)=aRPM^1.6 . If you just need the max point, its the no load current at full throttle.
Some data for my direct drive: Kv=100RPM/V, r=0.05Ohm, no load current=1.7A. Max current is 80A.
Kv=100RPM/V=100/60 2pi=10.5rad/(sV), so Kt is 0.095Nm/A
With 80A we get 7.63Nm. as we do this at full throttle, we need to substract the no load current, so its 7,43Nm.
Now we want the RPM at full throttle and full load. The resistive losses cannot contribute to the speed, so we take 80A0,05Ohm=4V. Lets assume we have some more losses in battery and ESC with another 0.01Ohm, we get 80A0,06Ohm=4.8V.
We use 48V-4.8V and get the full load speed with 43.2V100RPM/V=4320RPM.
So the Input power is 80A48V=3840W
And the output power is 7.43Nm452 rad/s=3361W
This makes an efficiency of 3361/3840=87%
I use a hub with 63mm and a duct with 140mm inner diameter.
What i did not understand so far: How can you calculate an optimal prop without knowing the load? Maybe WNT can tell us?
Today, I will only comment on the main reasons for measuring the torque.
It is better to measure the torque than calculate it. This is because gear and engine data are mostly untrue.
Torque measurement is needed for two very important reasons:
This will make it possible to determine if the measured torque is optimal for the planned propeller
if the measured torque is higher than required for the planned propeller, it will be necessary to replace the transmission with another gear that has a lower gear.
thanks for your post. I think we just missed each others point.
What I understand from your post is this:
You need reliable torque and rpm data for the motor used. I fully agree. The best way is of course to check the resulting rpm and torque with the desired propeller running in water.
With respect to propeller optimization our calculaitons and measurement points are to get a ballpark for a first propeller design, i.e. a place to start. Your second point looks to me like a way to optimize a propeller to a given motor. If so, I agree again. I think you want to optimize the propeller. This shall lead to a propeller with such a torque vs. rpm curve that the motor torque is equal to the propeller(=load) torque at the motors maximum rpm. This way the motor can deliver it’s max power.
Nobody on this forum has written much about the propeller theory or a common way to engineer a prop exept for you, thanks for engaging in this discussion. I did only enjoy basic fluiddynamics, so I would appreciate some advice and general assumptions when designing a prop.
The first points coming to my mind are:
If I optimize my prop for maximum static thrust, the thrust will fall off quickly when the vehicle gains speed.
How do I estimate if my impeller design is just inefficient or my static thrust vs. power used is just suffering due to the tradeoff above?
I have a quick and dirty impeller, but I don’t know how inefficient it really is. I have some torque vs. rpm vs. static thrust data. I still think this is not sufficient to optimize it as I don’t know the speed of my waterflow jet. I will measure this when warmer wether arrives.
(This leads away from the discussion, but my jet achieves 17,25kg thrust with about 2300W @ 6000 rpm thats about 3,6Nm impellertorque, my output nozzle does not restrict the flow area much and is ~63mm in diameter. I my mind I need a few test impellers with less pitch to get closer to my motors max rpm of ~10krpm. But I still assume my load on the motor will drop with vehicle speed and I can get closer to the max motor power at higher vehicle speed and thus reach a higher speed. Any input is highly appreciated, especially if it helps reduce the effort for testruns.)
I saw the torqeedo high speed video of how most props fail.
My idea is the following:
I feel I need to decide on my desired top speed then pick a propeller with the right pitch and then reduce the total area in a way proportional the differential in loads (a 1000 pound boat to a two hundred pound human) so about a factor of ??? where is our propeller expert when we need him…
I cannot find it now spent a couple minutes looking but nearly memorized it, the torqueedo chart shows pitch as well as total boat weight in the hundreds of pounds (400-1000 pounds) so for our case I imagine we could cut the total blade surface in half since the prop only has to contribute 30 kg of thrust total to get planing.
Any thoughts please?
(an aluminum torqeedo prop made on CNC by you might really dominate this industry unless we can buy them from water wolf) and could charge more versus plastic plus get quite a bit higher efficiencies due to the lower cross section due to aluminum being so much stronger than nylon
I am also going to get several KKK mudtail propellers from 5.5 inch to 8 inch because they have beautifully small center hubs so almost 100% of the prop is producing thrust or at least out of the way
Torqeedo p350 works nice apparently
I mesured the pitch of the plastic solas , it is variable pitch , i think most propeller are like that , you cut it you change thrust and pitch as well … Very hard to find the right balance between pitch and diameter or area …
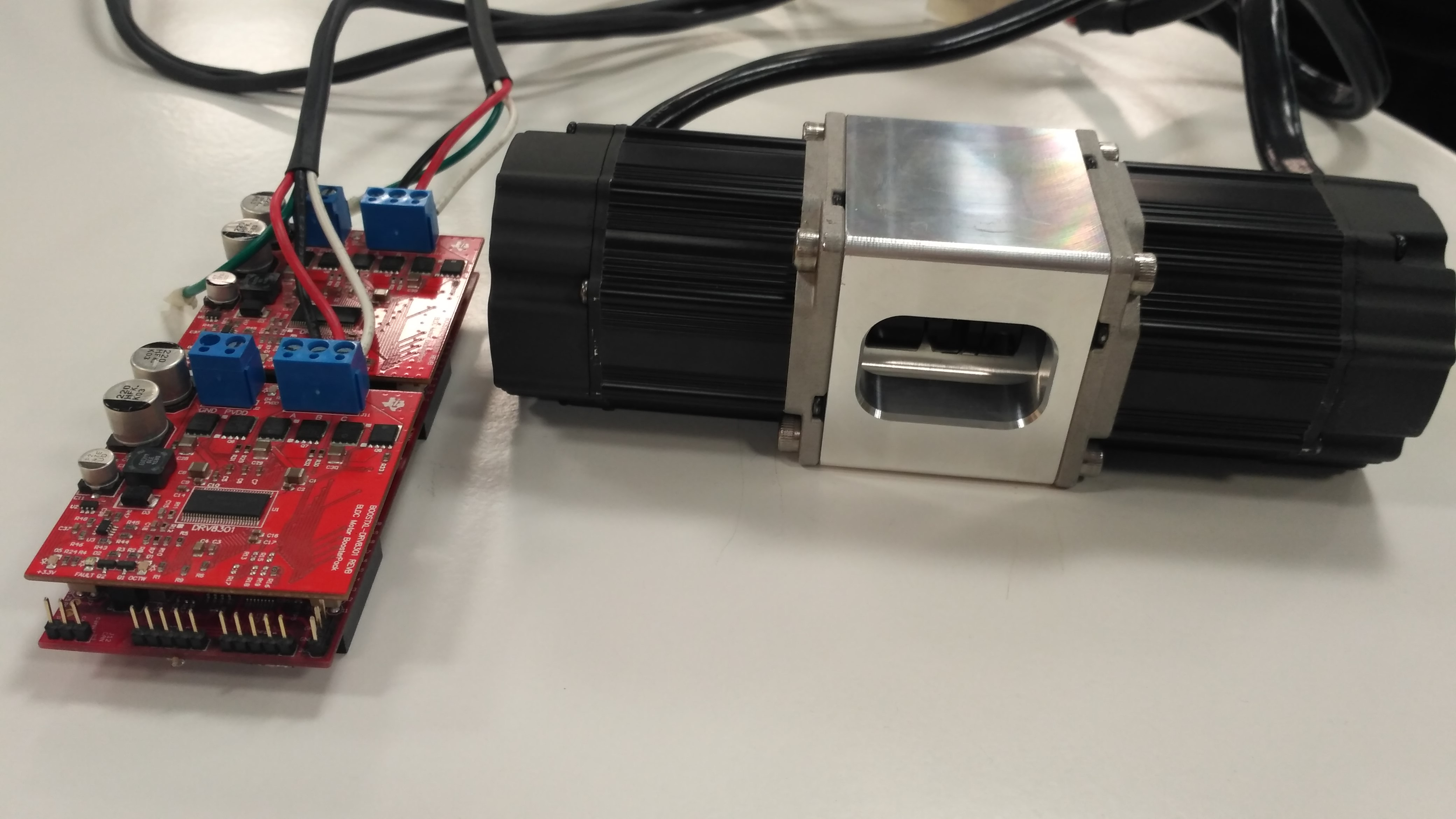
TI has a kit that says it will measure torque. This picture is of the dev kit. You can see 2 BLDC motors (w/ encoders) attached to each-other. One of the labs is about using 1 motor to measure torque output of the other.
The kit is quite expensive, but taking a large off the shelf BLDC motor and adding an encoder to it would be much less money. Then (the hard part) porting the software and calibrating would result in an inexpensive approachable solution to the problem of measuring torque at maximum RPM.