I will post below with all the things I have learned from messing around with my flipsky vesc over the last year as this may help you and others with similar issues.
However, I would add that you cant really avoid the reading with this stuff (I see that you just joined the forum and are only at 10mins reading time). There is so much info on this forum that you need to spend 10+ hours just to get your head around it - the acronyms will become clearer (or look them up on google).
What have I learned from many hours messing around with FLIPSKY 75200 V1 Vesc :
(in no particular order)
In terms of firmware have gone for FSESC_75_200_ALU default (recommended by Jaykup on Esk8 forum) despite Flipsky (Ariel) saying to use 75_300 (non R2 version). This one seems quite stable and good so far. It appears to have eliminated the problems of USB connection “freezing” that I was having previously.
When running Wizard, it does not seem to matter whether use Medium or Large inrunner
I have not been able to get FOC to work smoothly – I still had some cogging at start and when pulling trigger fully in one go get nasty noises. So its BLDC (sensorless) all the way for me (slightly noisier but much smoother)
Not too sure where to set max motor current, ABS current and Bat current but have set to 170, 200 and 120 respectively and seems ok. I have not gone above 86A Bat current and 120 motor current in my last run at full throttle and most of the time was at around 25A Bat current when foiling.
I have set maximum wattage to 5000 as this is a bit below motor specs – this will probably limit battery current to around 86 amps anyway (@58 volts).
I have reduce default temperature limits by about 4 degrees on all indicators for good measure.
I have set max Duty Cylce to 80% to limit top speed and to be able to go (near) full trigger for flying (I will need to adjust this as I get more log data – Motor Settings/General/Advanced)
I have set minimum current to 0.8A as this seems to give better startup
On App settings I have set input deadband to 5% and throttle curve to Polynomial (no adjustment) to get a snappier and smoother trigger action.
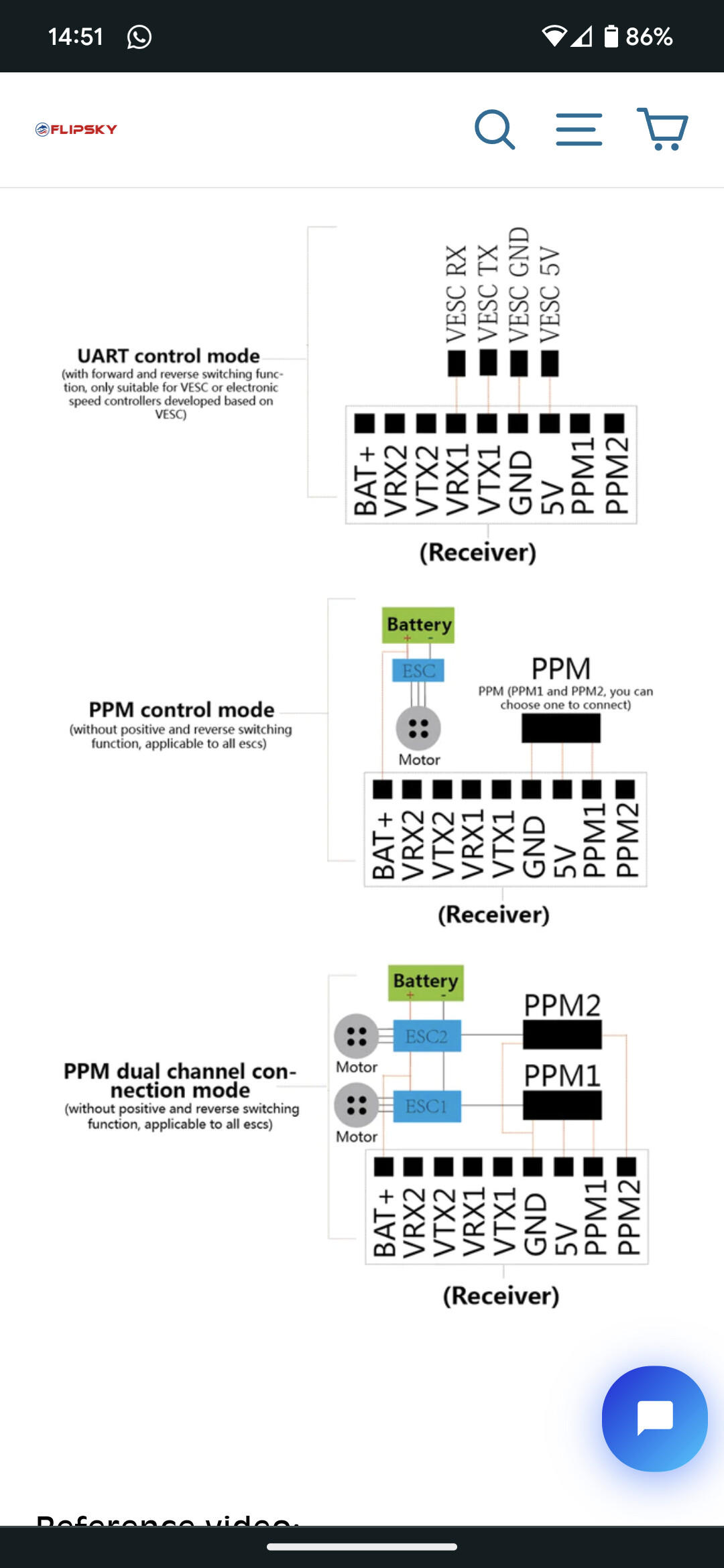
For the controller (Flipsky VX3) I am using PPM mode as I need the UART1 port for the flipsky BLE module for logging and the UART2 port on my version, does not support bluetooth (confirmed by Flipsky). I have noticed that the PPM seems to have a slightly faster response than UART but of course you loose almost all of the real time telemetry data on the controller.
As far as I can remember, all of the other settings are left at default values (except of course turning OFF the phase filtering in FOC mode to avoid destroying the motor according to Flipsky).
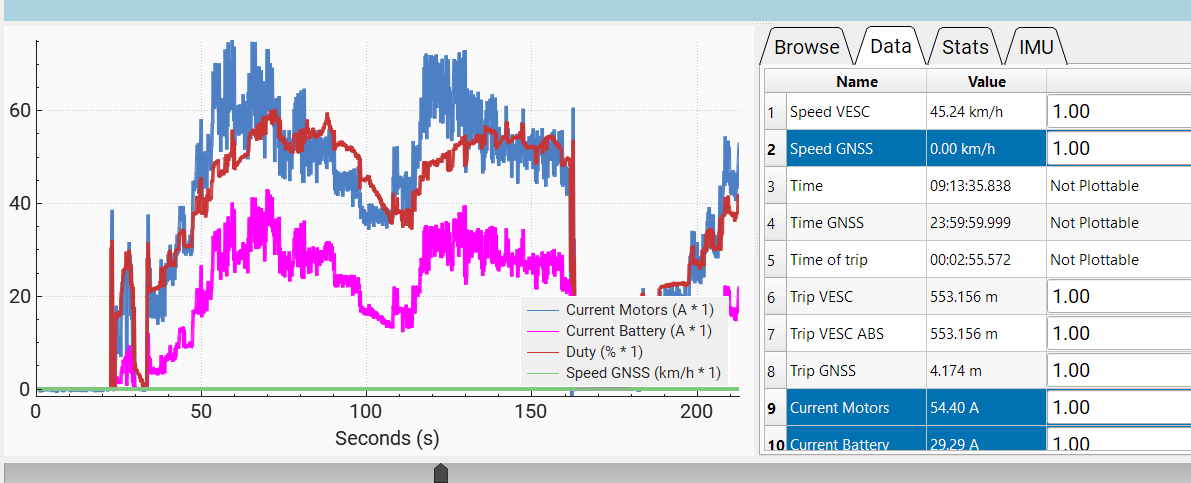
One issue I am still trying to figure out is how to get GPS data with the vesc logs - I get all the other info, but for some reason the GPS from my phone does not seem to be captured. Any ideas on this would be appreciated !
As a final note, I have not really figured out what the L, M, and H setting on the VX3 actually change - for example in PPM mode, do L and M modes reduce the maximum pulse width ? With my latest testing it seems I can still fly even in L mode with full throttle (this was not the case before when I was using UART mode but I have made many changes so it may be something else). However, it seems to require more current and power to fly in L mode that in H mode so something strange is going on here which I need to investigate further.
Quick update - I have tested the 3 modes H-M-L on the VX3 (in PPM mode) during the vesc app setup process. It appears that the M and L modes are indeed limiting the maximum pulse width - i get 2.0020ms in H mode, 1.8770ms in M mode and 1.7540ms in L mode.
Thank you @skullym for this information, it will become especially usefull when I start using the makerbase 75200 v2.
Did you figure it out?
For the controller (Flipsky VX3) I am using PPM mode as I need the UART1 port for the flipsky BLE module for logging and the UART2 port on my version, does not support bluetooth (confirmed by Flipsky). I have noticed that the PPM seems to have a slightly faster response than UART but of course you loose almost all of the real time telemetry data on the controller
So you surf like this without all the telemetry ??
I have battery voltage on the board as well as an indicator on the remote (from the specific battery pin on the remote for this when using PPM. The speed is also shown on the remote from its internal GPS. I guess I dont have ESC temp anymore but I never had any issues with this as I have passive watercooling. So, yes, for me it fine with Speed, and battery real time and the rest later with the log file.
The waterproof pouch I was using which seemed to limit or block the GPS signal, and
The fact that if you fall off and your phone goes under water this cuts the BLE link to the esc dongle. You need to restart it each time from the vesc app. So I was only getting data till my first fall I believe.
By the way - with a more recent flipsky ESC (mine is from 2021) you should be able to use both UART ports with bluetooth (BLE). Mine is a v1 and Fliplsky confirmed that the second UART wont work with BLE (not sure why) - that is why I have to use PPM for the controller and hence dont get all the telemetry.
Hi, not too sure what you mean by “calibrate Amp”. I guess you are talking about how to determine the maximum battery and motor amps to set in the vesc app ?
If this is the case it will depend on your setup - battery pack capability, esc specs and motor.
For my situation I have a 14s12p pack capable of 180 amps continuous current and and ESC rated at 200amps. The motor is rated at 6000w max, so (using power=I x V), that would mean about 103amps at 58v(14s fully charged).
Remember that motor amps will always be higher than battery amps based on the duty cycle. (Eg at 50% duty cycle, motor amps are approximately twice battery amps).
These calculations for your setup will give you some maximum settings that you should not exceed and probably stay below by a safety margin.
Then its all about test, log and learn to aee what is happening and fine tune.
I am sorry, my comment was not precise enough. I was referring to the fact that, for example, the amperes on the real time of the vesc-tool do not match with the amperes on the VX3. Hence my question, how do we proceed to calibrate the real consumption on one hand, and then have the same consumption on vesc-tool and VX3 on the other hand. (thanks for sharing the post" What have I learned from many hours messing around with FLIPSKY 75200 V1 Vesc :" lots of this is precisous and I discover some of them after many hours of reading here and esk8)
[EDIT] I just read again your post where you write you don’t have telemetry on VX3 because of PPM use.
Yes, as you noticed I dont use UART any more so I dont have the Amps on the VX3.
Previously, I had not noticed that the reading was different from the vesc - normally it should not be as it is reading data directly from the esc - I would guess it is reading motor amps and this may be the difference if you are comparing to battery amps ?
Otherwise I dont know of any way to calibrate (other than logging and working out the difference) and I doubt that Flipsky will be much help as I have had several contacts with them which were not very fruitfull.
Hi
Thanks for infos.
About amperes reading, you probably true. Vesc tool give motor amps and vx3 battery amp ? Kinda stupid. Perhaps I will try other settings on vx3: do you use in vx3 settings VESC: « FSESC » ou VESC: « VESC » (they write on manual for other Vesc than FLIPSKY).