but how do I find the right o-ring for the inner diameter (84mm) of the aluminium tube ?
Does anyone know a calculator where you can enter the diameter of the aluminium pipe and calculate all the required dimensions? (o-ring size, groove,…)
Send me your 3D file without the groove. I’ll generate it automatically with the oring on Inventor 2020. I am not into Jet Drive so you can definitely just send the part of the file you want me to modify if you don’t want to share it totally.
You can use this PDF https://static.o-ring.de/or_3.pdf
Take for “Nuttiefe” = dynamisch and for “Nutbreite” = ohne Stützring - allways use grease to mount o-rings - to insert it in the groove and on the surface where it has to slip in.
Interesting construction. What was your approximate speed that you reached?
I think an SUP is not designed for higher speeds and does not glide.
I’m curious how efficient the drive on the windsurfing board will be. After all it is designed for planing and early planing. But I have to reach at least 20km/h for it to glide.
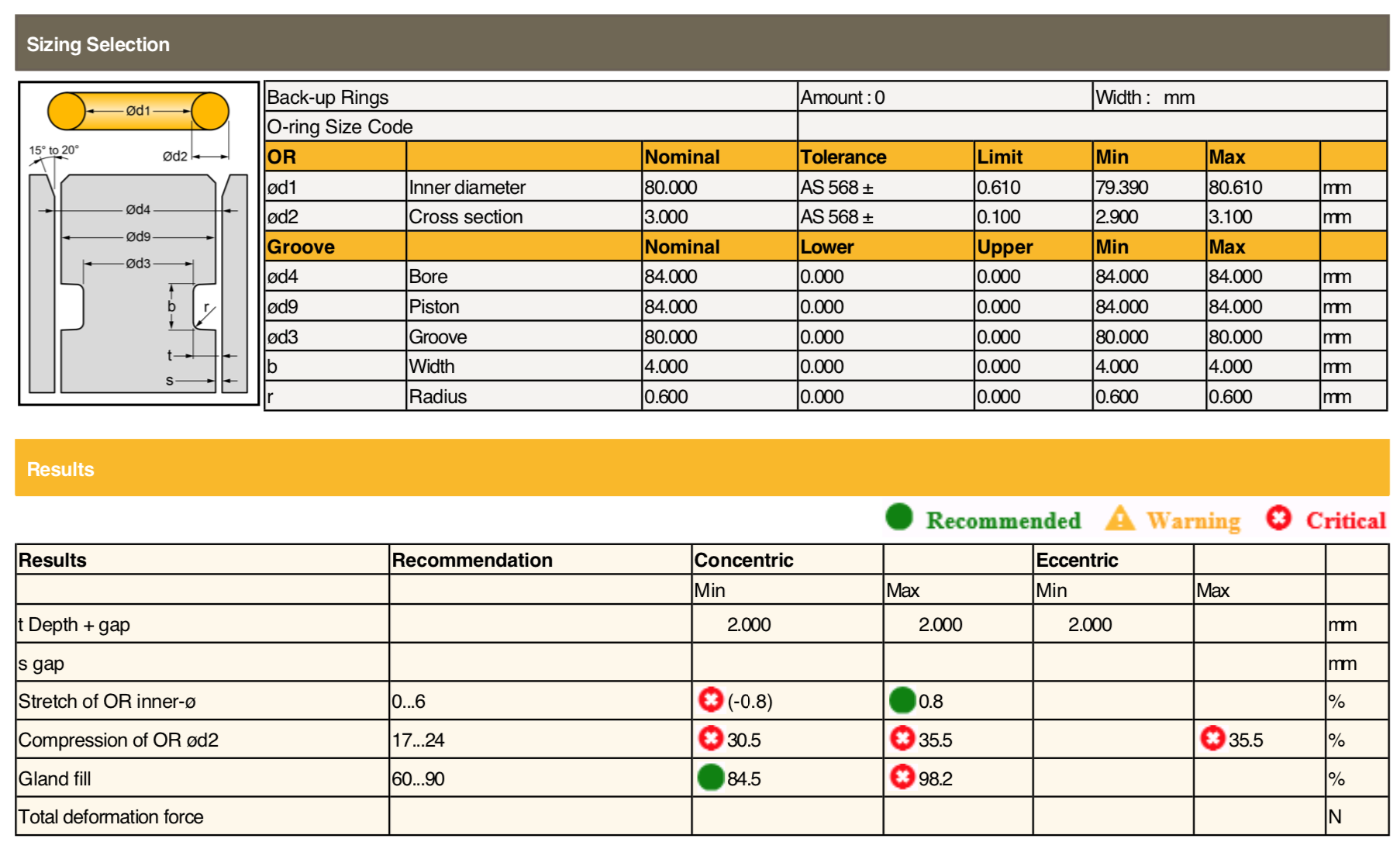
Today at noon I found an app from Trelleborg for Android. (Just enter Trelleborg in the Playstore)
In the app the bore diameter is entered and the matching o-ring and groove is calculated. exactly what i was looking for. I will now test the suggestion from the app.
Max. speed was 16kmh - but with 100amp at 10S not really efficient - all in all nearly 4kw.
A similar construction with outrunner and propeller need less than half.
A electic power SUP or windsurfing board is a nice thing - but believe me, once you are efoiling that’s all you want
For jet propulsion a high KV motor and for propellers a low KV motor.
Since I am still in the test and optimization phase myself, I cannot yet make any engine KV recommendations.
For a jet drive a thrust ball bearing is not really necessary. The pressure is created at the nozzle of the jet, at the moment the water leaves the nozzle.
However, to be on the safe side, I have installed a double angular contact ball bearing. This can take axial load well.
The acutal motor is a 7040/6 so around 280-290 rpm/volt.
I am using LiPo cells in a 14S/1P configuration.
The can handle 300 A continiously (per cells).
15S was bad for the ESC…
If you need more, we can talk it Whatsapp
Some time has passed in which I have continued working on my project. In the meantime I have found the right O-rings and groove combination.
For the final assembly I am still missing two washers and nuts, unfortunately the DIY stores are closed due to corona.
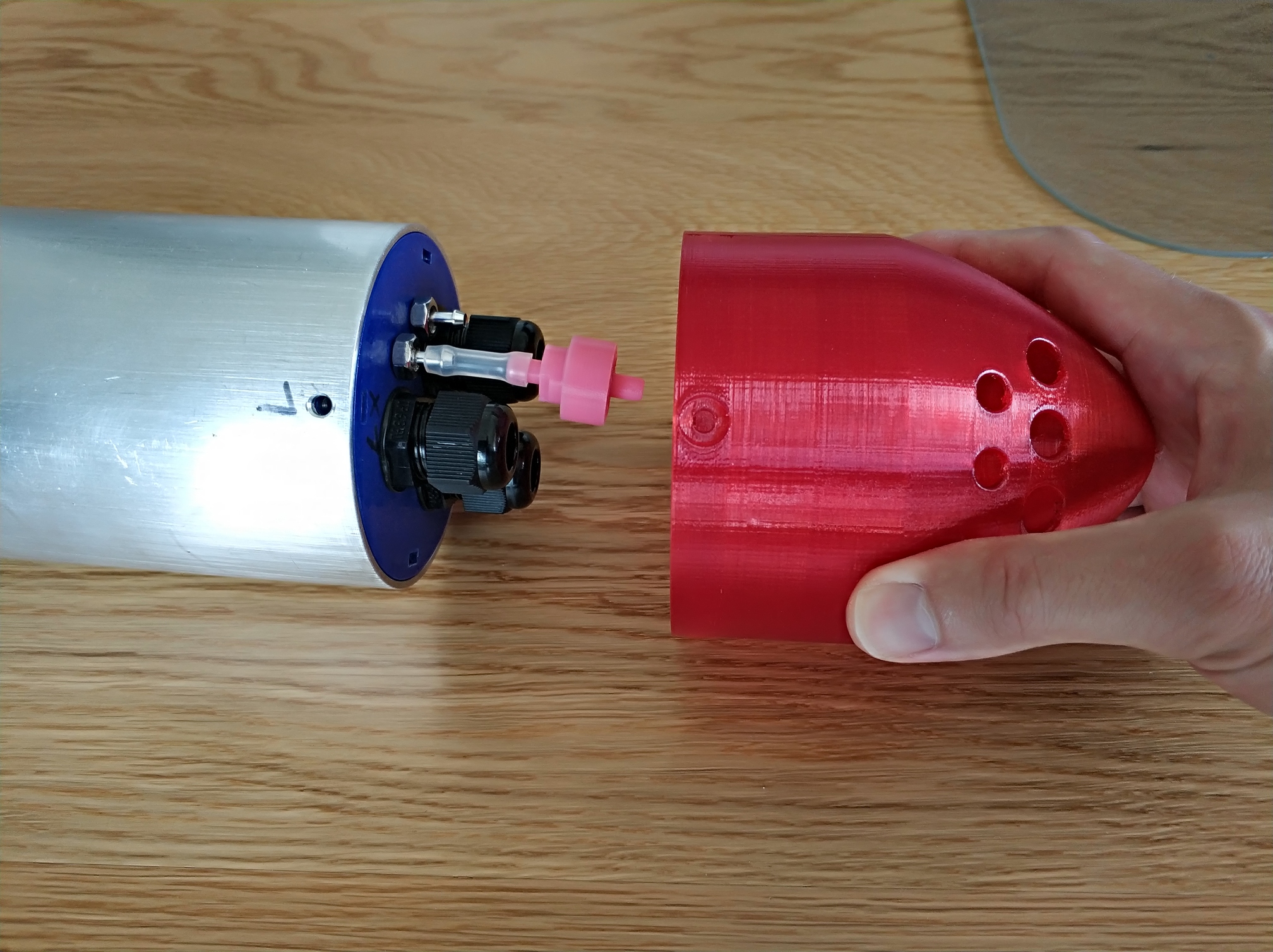
Some parts I have printed again to simplify the maintenance. (easier assembly and disassembly)
I have built a water filter to prevent dirt from getting into the cooling jacket of the engine. In the video I have tested the filter with a syringe, it is tight. (With a 3d-printed sealing ring from TPE)
Today was good weather after a week of rain. Finally I could test my drive on the lake for the first time.
My conclusion is that it is worthwhile for me to invest further (e.g. waterproof electronic box, waterproof remote, mounting on the windsurf board, optimizing the impeller and nozzle)
With the standup board and drive in my hand I reached a speed of 8km/h, current consumption was about 60A with 6S Lipo. Throttle was at about 75%. More I could not give, since I could not hold the drive with one hand otherwise.
I also had the problem that I always created a vortex in the intake area which sucked in air and lost thrust.
My next test will be with my Windusrf board, which probably has better gliding characteristics than the StandUp board.


 and not posted.
and not posted.