I posted some battery details earlier on another thread and thought it was about time to start tracking what my plan is for a starting a build with the parts I’ve got already and then my ideas for what I need next.
So far this is made up of spare parts from electric skateboard builds and powered by lawnmower batteries.
Motor: Flipsky 65161 120kV (Amphibious Fully Waterproof version)
ESC; my spare MakerX DV6 vesc rated for 100A continuous in aluminum case. I obviously don’t need a dual motor VESC for this so I’ll probably wind up with a flipsky 75200 water cooled (or equivalent) and then swap this DV6 into a skateboard.
Remote: The $30 generic waterproof remote from aliexpress. I’ve already used this for my standup paddleboard motor so I’ll either order a 2nd for the eFoil or upgrade to a higher quality one and keep the cheap one on the SUP.
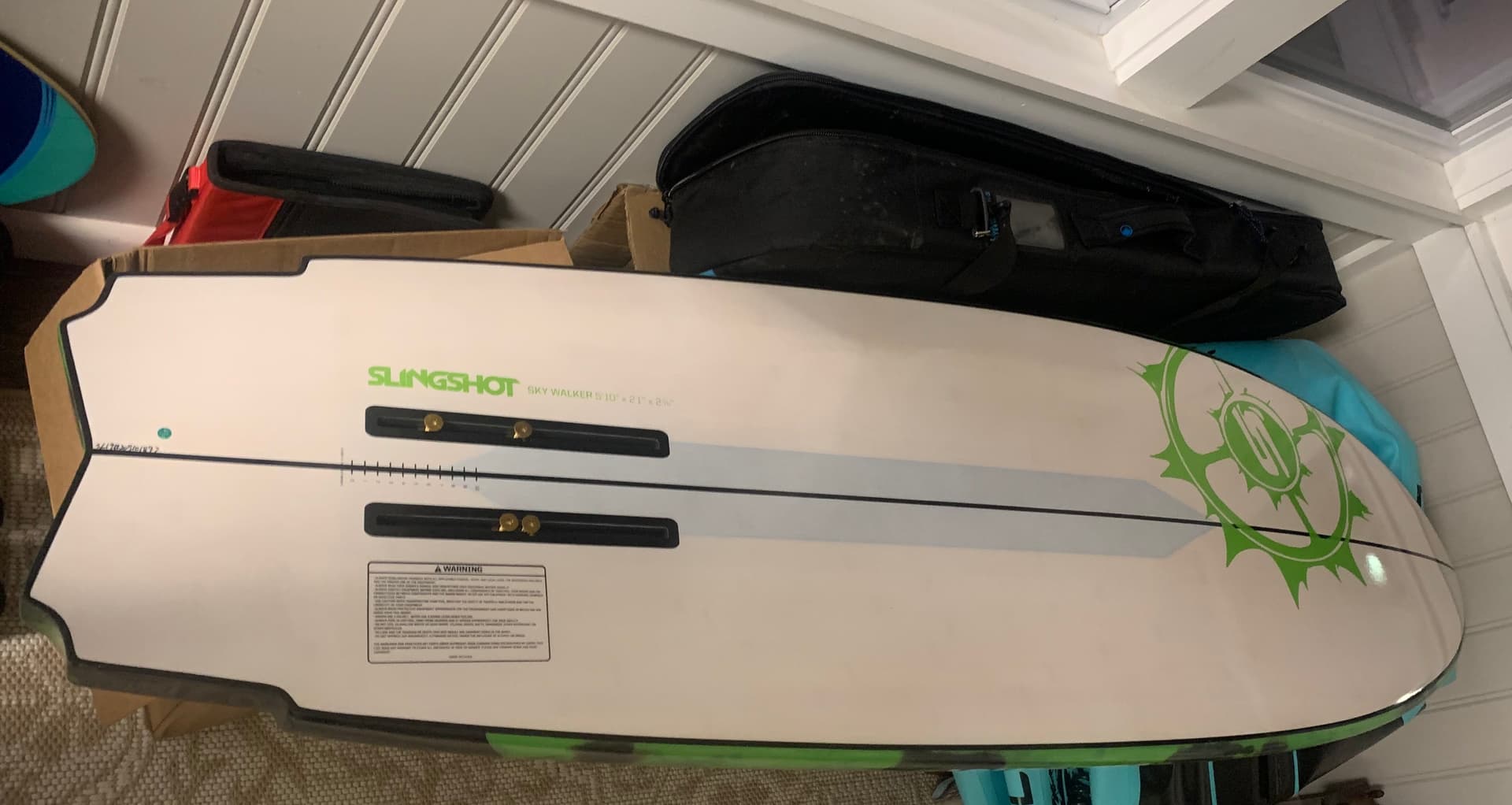
Board: Slingshot Skywalker 51L surf foil board. This is probably one of the least suitable pieces of my kit right now due to the low volume but I’m thinking either it works or I can resell it without taking too big of a hit on the $250 I paid for it (including shipping). I took it for an unpowered test in the river and it is definitely a prone paddling situation. My theory is that I’ll start to plane and lift pretty quickly once I apply power but really don’t know how it’ll turn out in practice.
Foil: Liquid Force Happy medium aspect mast and foil set. I understand a higher aspect would probably be ideal for starting out but I could address that and then move to the medium aspect once I have more experience.
Batteries: I’ve got a matched set of ego 14s4p “56V 12Ah” lawnmower batteries that are using Samsung 30Q cells. Still not sure how well they will work out but it should be enough to get started.

Prop: starting out with the flipsky aluminum prop (threaded shaft) which I understand isn’t the greatest for our application. I’ve got one of the 2-bladed props halfway through a print right now.
Clamp setup: 3D printed in PETG based on a design from the forums here that I will have to link. I bought a roll of cut-to-fit silicon baking sheet that I may use for the contact surfaces with the mast. Test fit looks something like this:

Challenges:
-
explaining what any of this is to my friends and family
-
board volume is too low for a beginner at 51L as I’m around 64kg and understand I’d probably want something around 80L. I actually have some sheets of XPS foam I’ve considered shaping to the skywalker board to give it a quick buoyancy boost. I may build my own board in the spring but I won’t have a great work area through winter.
-
It goes along with the board issue but I’m using a waterproof “pelican” type case which has been fine for a SUP but may prove insufficient for an eFoil where I expect to fall a lot in the beginning. My case also has a height of about 6” which makes it tough to embed into a board.
-
I haven’t put too much thought into my cooling setup so far. With my electric SUP experience I was getting into the beginning of the thermal limit range (70C?) with any sustained thrust using a flipsky 4.20 vesc and 10s batteries. I’m using a better VESC for the eFoil build but also running much higher current.
-
Wire routing—it looks like people usually just drill a hole through their mast and then route up through the mast clamps and board? At this point I’m not sure I’m ready to cut into the board or damage the mast so we’re probably looking a zip tie situation with all the drag problems that go along with that.
-
Wire glands for case—I’m leaning towards three smaller penetrations to feed the wires through individually instead of bundling them together inside a single larger sleeve. It sounded like a people were getting water up into their case through their motor wires so it seems like three smaller glands would be easier to keep a tight seal on even if it’s more potential points of failure.
Probably 100 other things I’m forgetting but this is a start.