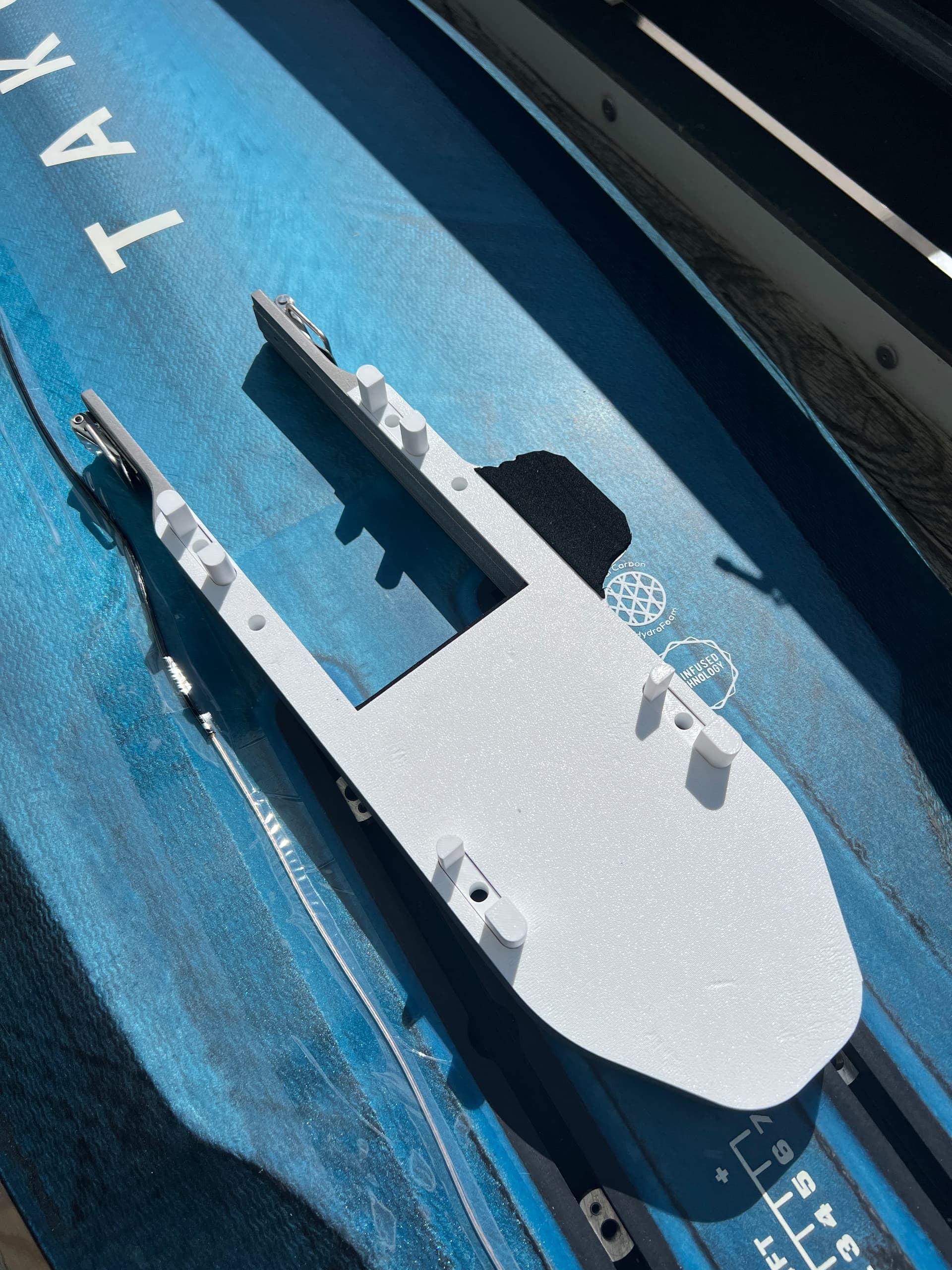
I needed to remove the area of the antenna plate below the battery because it was bending upwards after mounting the mast. Probably the eva pad also contributed to the bending. I will try it with eva just above the external antenna only.
Also added some adapter to guide the mast bolds and hold the nuts in place.
well after a first try where phase current was all wrong from autoidentify, I got to test it, and despite the heavy prop vibrations and difficulty to unfold, it worked great, felt stronger than maytech 6374, and I think I could feel a reduction in drag when the pod tourch down, making it easier to maintain balance with pod in or out of the water.
I could start easily in small chop and motor upwind.
While I wait for blades, I will print out the hub in PPA or PA with 100% infill, as the PETG-GF I tested already has a crack after one session.
It has been 1 year with the indiana barracuda XL as my main wing, still really enjoy it, it is efficient and can handle speeds up to 24kph with my weight, but still playfull and can carve very well for the size.
Looks like you could make good use of a third arm when putting out that parawing while pumping, holding the remote, the camera and the parawing bar
Great to hear that the motor is performing
The silicon putty I was waiting for was delivered so I finished up the build:
sealed the antenna compartments with silicon putty
potted the electronic with magic gel → 250 g of magic gel
put glue on every screw
The complete unit with battery is at 3.57 kg. The prone board is at 3.61 kg. I think I will land somewhere between 9 and 10 kg as the Gong Material is not the lightest out there.
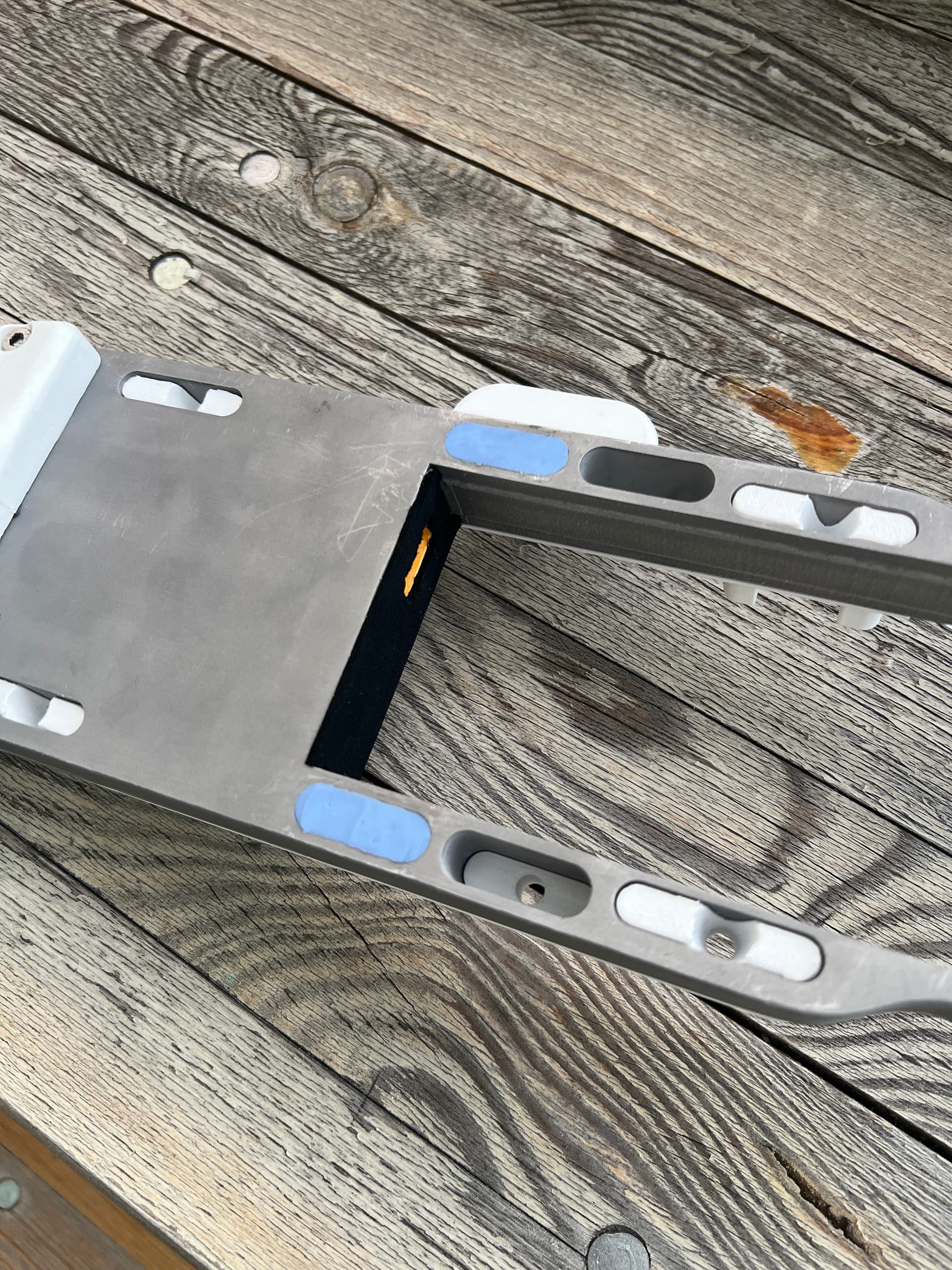
And here from the bottom. The reception plate pushes against the silicon from the bottom (about 2mm of compression). The mast on top is holding against it.
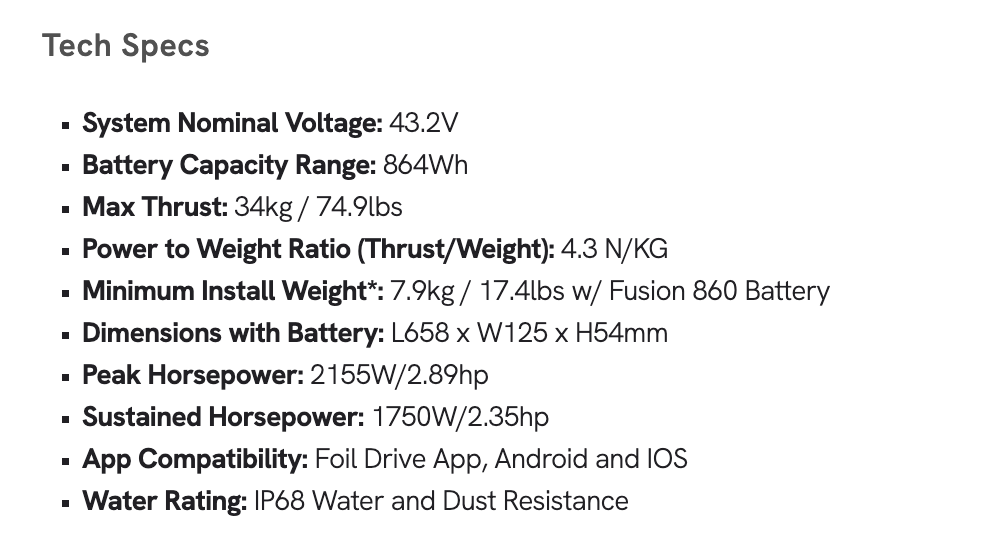
To reach those peak power outputs with an empty or full battery would require battery amps of:
Fusion (2155 W)
Full battery (50.4V): 42.75 A
Empty battery (36V): 59.86 A
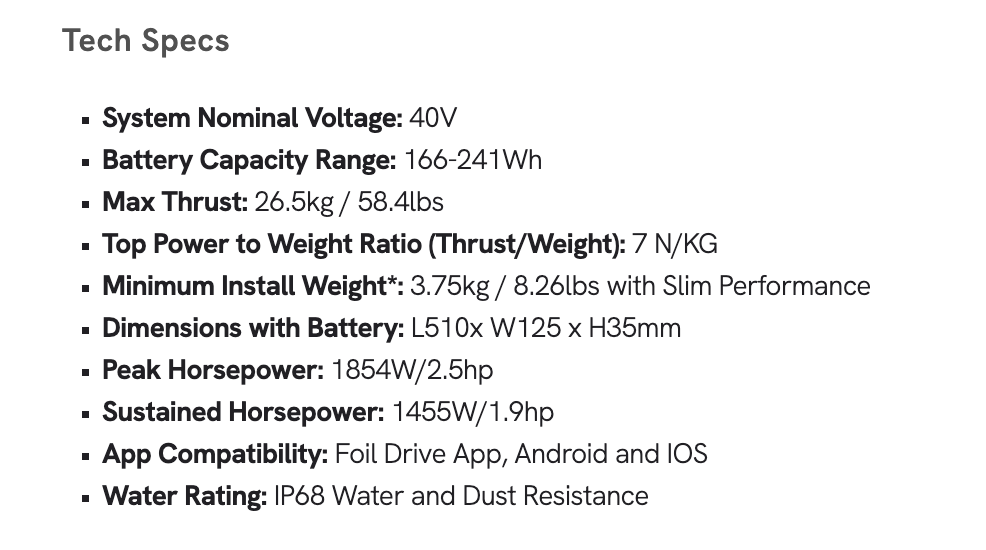
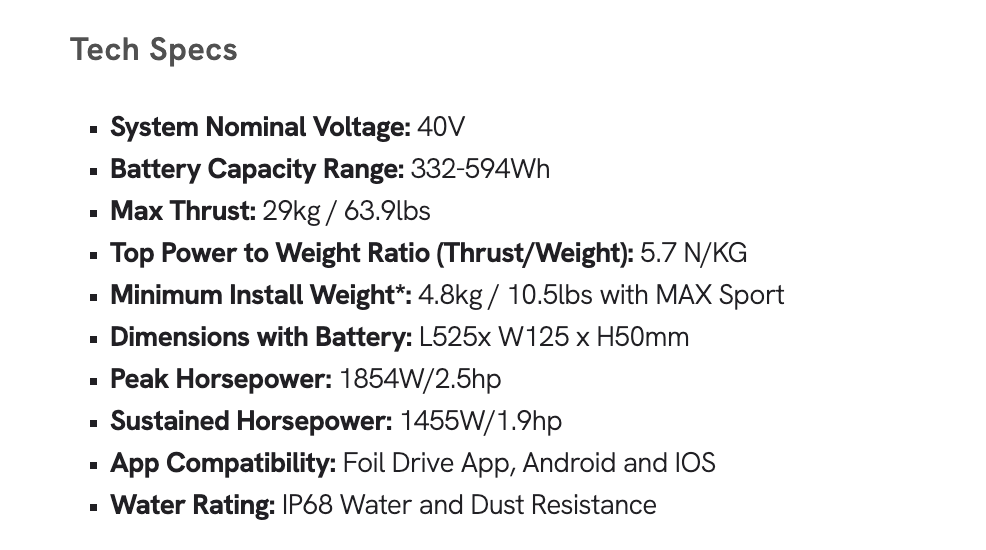
Slim/Max (1854 W)
Full battery (46.2V): 40.13 A
Empty battery (33V): 56.12 A
And for sustained power outputs:
Fusion (1750 W)
Full battery (50.4V): 34.72 A
Empty battery (36V): 48.61 A
Slim/Max (1455 W)
Full battery (46.2V): 31.49 A
Empty battery (33V): 44.09 A
It is interesting to see that they are limiting the Max and Fusion compared to the Slim pretty hard. The Slim battery is a 1P, the Max has 2P and 3P batteries and the Fusion has probably 4P I guess.
Also what is interesting that despite the same motor and power output the Slim has less thrust than the Max. It seems like they are artificially limiting the Slim on the VESC side. Probably by phase amp settings?
The question for those power output numbers is, are these numbers mechanical power output at the prop or electrical power output? If it’s mechanical, then the battery amps are even higher. This would also mean our units are more likely comparable to the Slim/Max units regarding power output.
What aluminium did you order them from? AlSi10mg or Al6061? 6061 would be stronger and more resitant to salt water but more expensive and prone to cracks. AlSi10mg is better to print fine structures but a bit less strong and hard to machine.
I think I‘ll go for AlSi10mg.
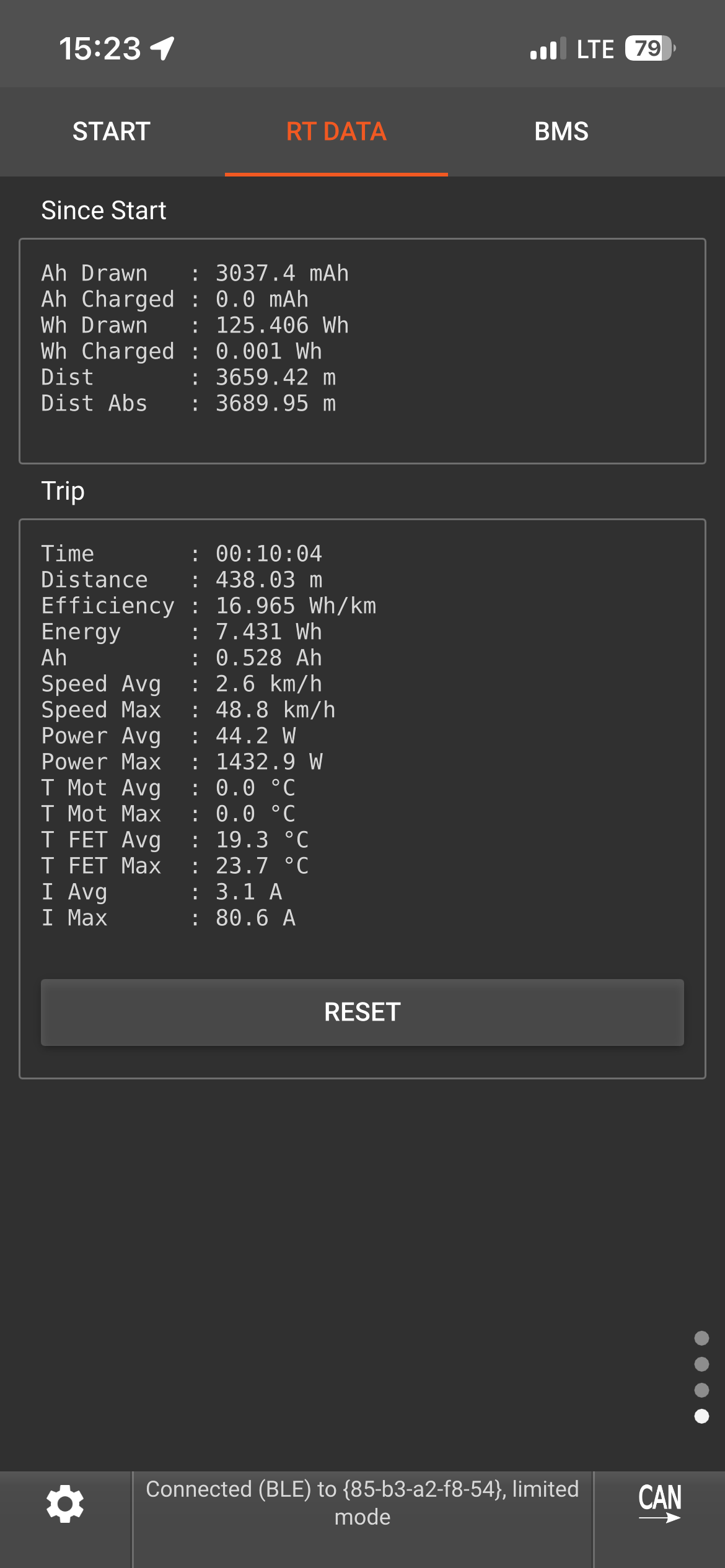
I could test the assist today. The good news is, it did not burn down. The bad news I could not get up. Something is limiting my power.
The complete setup is at 11.5 kg, while the mast and foil make up 4.3 kg. I ride the Gong HM mast in 77 cm, titanium fuselage (which is heavier than the alu) and Veolce H XXL (1300 cm^2).
In my config I have set the power limit to 2100 W. But I reached only 1432 W. I will dig deeper if I can find some logs. Otherwise it will be trial and error.
Regarding the antenna. The reception is very weak. I really have to hold the remote next to the antenna. 30 to 40cm away I loose the connection. So I also need to improve this.
What is your max phase current setup? That could be the limiting factor as you need a lot of torque to accelerate. You only get max wattage if you can reach a certain rpm level. Bigger foil/ board, prop with less pitch or more current would help.
At least efficiency, you’ll see phase amps at double your battery amps. I always set my phase to 140 and battery to 90. That way I have a bit of headroom. I’ve found I got 80a and 140a phase on a deep water start with a 24L board.
I have battery at 50a and phase at 140A (only need 120a with 120kv 6384) if your battery current is not maxing and rpm are low compared to unloaded, means the motor is not producing enough torque to spin up the prop. Non-vesc esc usually do not have any phase current limitation, leading to the common misconception that vesc is less powerful.
Prop also matters of course, some will require more or less amps to spool up. Motor kv is also very important, lower = more torque per (phase) amp
120 Kv and 120 phase amps => 9,5493 Nm
130 Kv with 120 A => 8,81 Nm
130 Kv with 100 A => 7,35 Nm
130 Kv with 80 A => 5,88 Nm
The motor needs 130 phase amps to get the same torque. But it has not reached even the 100 phase amps yet. The next logs will show what really happens I hope.
@Jezza you are setting 140 phase amps. Do you have a 140 Kv motor coincidentally?
I had to rip up the magic gel to change the sd card. Did your magic gel heal completely or should I add some fresh gel? @Bzhwindtalker