Before I hook everything up, I would like some second opinions, on my wiring before powering the G300 VESC up.
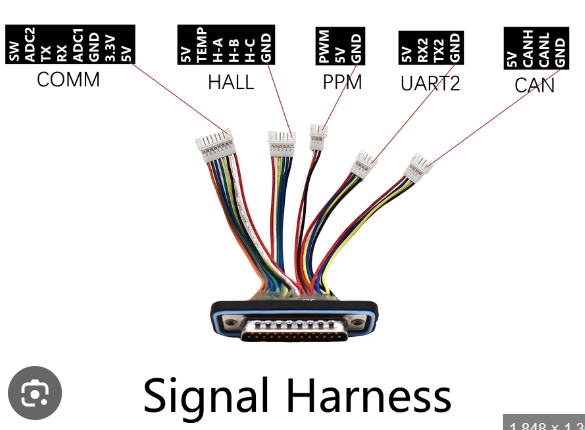
I’ve got the G300 VESC, a bluetooth module, a power switch and a controller reciever. I’ve attached a picture of the input ports on the G300.
When I got the power switch, BT module and RC reciever, they all use a connecter that only goes into the COMMON port on the VESC. I do not want the power switch, so that is out of the picture.
Is it possible to wire the BT module and the RC reciever to both go through the COMMON port, or should I re-wire the connections, to that the RC-module uses the UART2 Port (4pin), by using the TX2, RX2, 5V and GND. Therefor leaving the BT module in the COMMON port.
If so, what settings in the VESC Tool should I change?
It doesn’t matter which uart you use for the devices. I’d put the BT module to uart2. Make sure “permanent uart” is enabled in vesc tool for the 2nd uart to be active. In case it should not work, you might need to cross rx/tx.
Thanks, I can’t seem to find the ‘‘permanent uart’’ setting in the VESC Tool APP on Iphone. I am currently having connectivty problems with usb-c to pc, so I am limited to only using bluetooth to my Iphone app.
Perhaps it is possible to connect the pc with bluetooth to the vesc??
From a windows PC you can’t, native BT from VESC tool is not supported. You can try to use “wireless bridge to computer” from vesc tool on your mobile (connected through bt) and connect over wlan with ip from your PC.
I have now run into another isssue, which I can not solve myself… as I give a small amount of throttle, the motor stutter and turns back and forth 10-30 degrees rapidly. When I then go to give ramp up until full throttle, it suddenly goes from nothing to 100% and makes the whole board jump! Seems very violent. I am using UART connection for the throttle remote (Uni1 remote). Is it normal, that the motor under no load only have 0 or 100% throttle?
I have calibrated the motor as per instruction from youtube vesc setup for Efoil.
If you run the motor with current control, it is normal, throttle range is 0 to max current configured. Without load if you give it a little throttle, it jumps to max speed as freespin current is only 2-3A. It wil work in the water.
So that explains the throttle behaviour, but how about the jerky stuttering startup? Seems to be a bit better when changing to BLDC, but thats obviously louder and less efficient.
Hard to say from a distance. Could be slightly off motor params. You could try to rediscover the motor params. If rotation direction is random and it stops under load, usually one phase is is cut. If it just stutters at startup, you can also try to set a small break current (5A). Although there is no logic behind that, it helped me get smoother acceleration.