If you use Adaptive Frequency-Hopping (AFH) you can actually go up to 100mW (20dBm) in Europe, but I doubt they use that. One can also get another 6dBm of link budget (2x range) by using BLE long range mode (125kbps coded phy), but again I doubt they use that.
I doubt Lift and Flite cared about the EU limit. And I really doubt they have a legal CE regarding those rules RED2014/53/EU .
At least I was not able to get anything published of them regarding above or CE- conformity…
Funny that those “big players” can sell in Europe anyway…actually those rules are made not to harm anybody…but seems no one cares about that…
How is the remote coming along?
It’s coming good… testing every day past week. Adding features as i go.
Should have stable release v1 in few weeks. Starting next week will have several users to start using it from this week end to see if i missed any bug but so far happy with the result.
2 Likes

In reality it’s even brighter 
For wing and prop testing purpose, I’m looking for a feature that could increase the rpm by programmable steps (stabilized by a feedback loop), say 200 to 400 rpm steps so that I can reach 3600rpm in 10 to 20 steps. Do you think you could offer that ?
1 Like
I’m willing to buy and bench beta test. Gimme a shout.
You actually don’t need any stepping or consistent remote input for prop and wing testing.
If you have reliable data for speed, rpm, voltage, current and prop pitch you have everything needed to calculate efficiency.
However,
1 - there won’t be more precise and self-explanatory data to correlate than rpm, GPS speed, voltage and current averaged on 10 seconds at 1000, 2000 and 3000 rpm.
2- simple protocol that can be shared by hundreds of testers, identical conditions,
3 - if the Volt remote cannot do that, who can ?
The remote input is completely irrelevant in any calculation for the systems efficiency for wing and prop testing. It has absolutely no bearing on it whatsoever.
Indeed the remote displays efficiency in W/km already in realtime… Just simple maths
There is a huge misunderstanding in the cause / consequence chain here:
Remote control trigger position => motor rpm => (V Speed kmph, U volt , I amps)
So @Mantafoils, can you help in plotting the first propeller polars as:
1 - Px (watts) = f (rpm) ----- 2 - Vx (kmph) = f (rpm) ----- 3 - Px = f (V Speed kmph) with spotted rpm’s ?
where rpm in {500, 1000, 1500, 2000, 2500, 3000}
and x in {Fliteboard, Flying Rodeo, Mantafoils, MyProp1, MyPropN…}
P being the instantaneous power drawn from the battery
1 Like
To.be honest , i have other priorities at this moment 
1 Like
I meant as a costless feature that would be very interesting for a remote control. After all, It is only a governor mode based on rpm useful for both beginners and DiYers.
1 Like
No I understand what you want…A cruise control via motor RPM with the ability to go up in 500rpm increments.
Again though its not needed to calculate efficiency of the prop or wing (which you stated was the purpose). You don’t need any constants to calculate the efficiencies. You can just plug in a formula and graph the efficiencies in a dynamic environment.
A more interesting approach to calculate the foils speed relative to water would be to add a paddlewheel. This would remove any water currents from the equation. This mapped to a data logger along with dynamic RPM, Voltage and current would give a solid idea on prop and foil performance.
Would it be possible to order it custom with 433mhz instead of 2.4ghz? I understand the cutoff issues and regulatory concern but I’m a buyer @433mhz. in USA Lpd433 can only be used by licensed operators and in most of the EU it’s fine.
I’m willing to sign an indemnity clause or a clause that states that I’ve got all the needed certifications to operate on that band. 
No can’t because the current code those not integrate that feature. Sorry.
Yes I’m not asking @Mantafoils for a plotting application, a tool will plot the data provided by the data logger. A spreadsheet could even do that with a csv file containing 10 to 20 coordinates. An Open Office macro can do that.
I don’t, however prop rpm ranging from a to b at determined steps is a working framework easily understandable / reproducible from anywhere in the world to compare N wings/props/motors during the same session preferably on a lake or calm sea without wind or current.
Have you noticed that when it comes to comparison, today there’s no polar/visual tool to say that a given prop is better than another one according to a given criterion (speed range /autonomy, …).
A cruise control via motor RPM triggered from the remote with the ability to go up in, say, 500rpm increments can offer that. This protocol could allow to superpose curves coming from Russia with cuves coming from Tampa ![]()
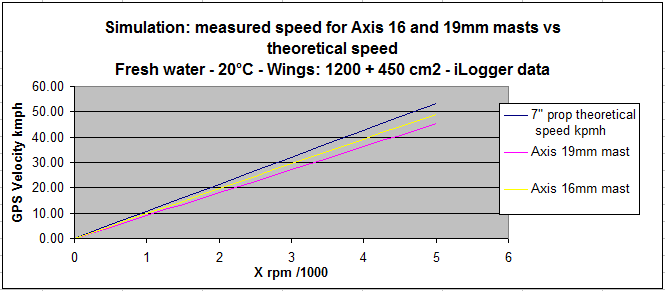
[Edit] how does a mast thickness influence speed, here Axis 16mm vs Axis 19mm ? A tailored mission for a stepped rpm cruise control remote:
'Custom mast ideas - #15 by SoEFoil
In stock, shipping, June 15th
