I use a nano-x transmitter and receiver which had various malfunctions in the past. I resoldered the quartz in the receiver to get rid of binding problems, this seemed to solve the problem. But now i have a new problem: After driving with full speed for a couple of minutes, the throttle does not have any effect any more, regardless of releasing, reversing and even shut off of the transmitter, the nano-x receiver seems to put out 100%. The first time this happened to my son, he threw himself off the board and it continued driving into gravel and sand, damaging the propeller and duct sligtly, than it suddenly stopped, probably the VESC detected a malfunction because of blocked motor.
A few days later i was facing the same problem, but as i was aware of the possible malfunction i was able to cut the main power by the safety switch and relais. Also i could reproduce the behaviour several times: Several seconds i tried to reverse the throttle to speed down. Than i shut off the transmitter and it was still giving 100%. After cutting main power and new binding, the function was normal again for some time, but after several minutes of full power it was not slowing down again.
Hey PowerGlider,
I use the nano-x for my e-skate. You can setup the failure mode, that it will brake, or just don’t give any thrust anymore.
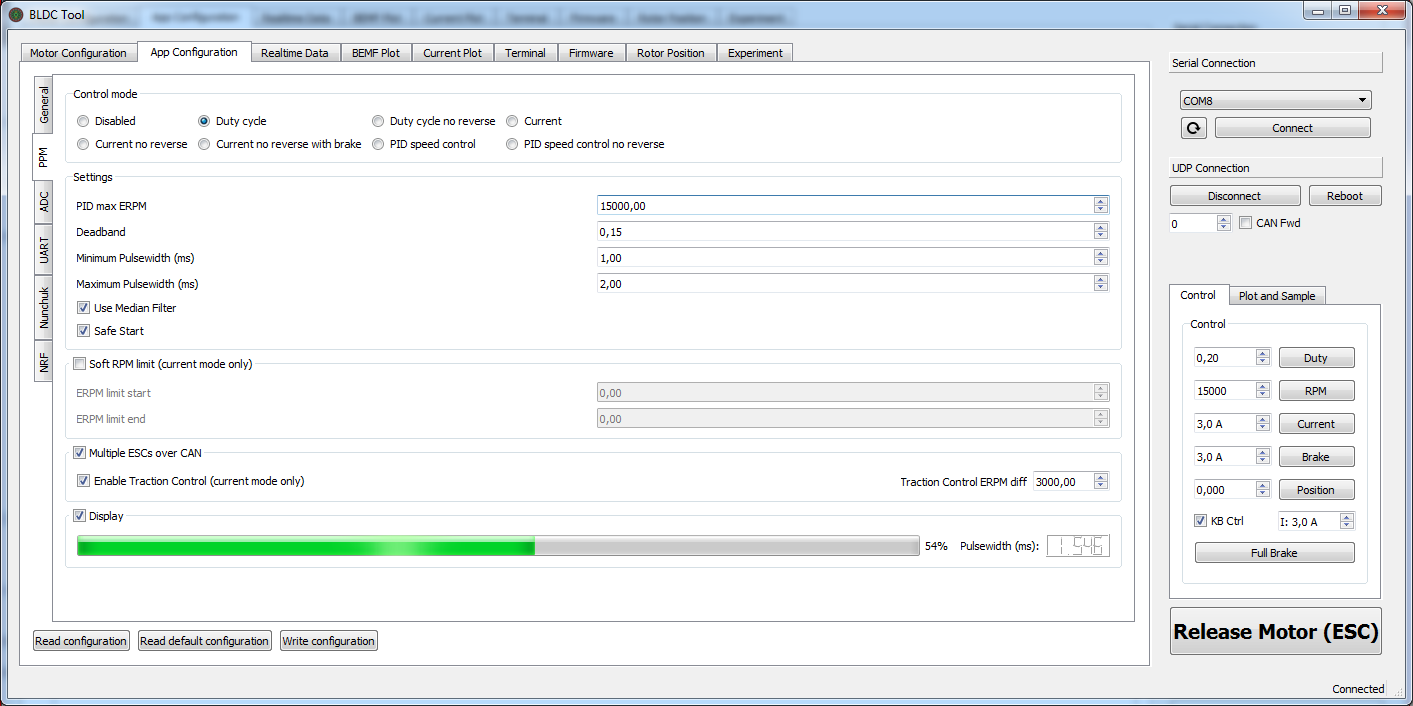
Did you watch die PPM input signal via the vesc-tool to track down where the problem comes from?
maybe this is related and you crated a cold solder joint somewhere else on the PCB while you resoldered the quartz.
I think the problem is either related to heat or the duration of constant maximum throttle.
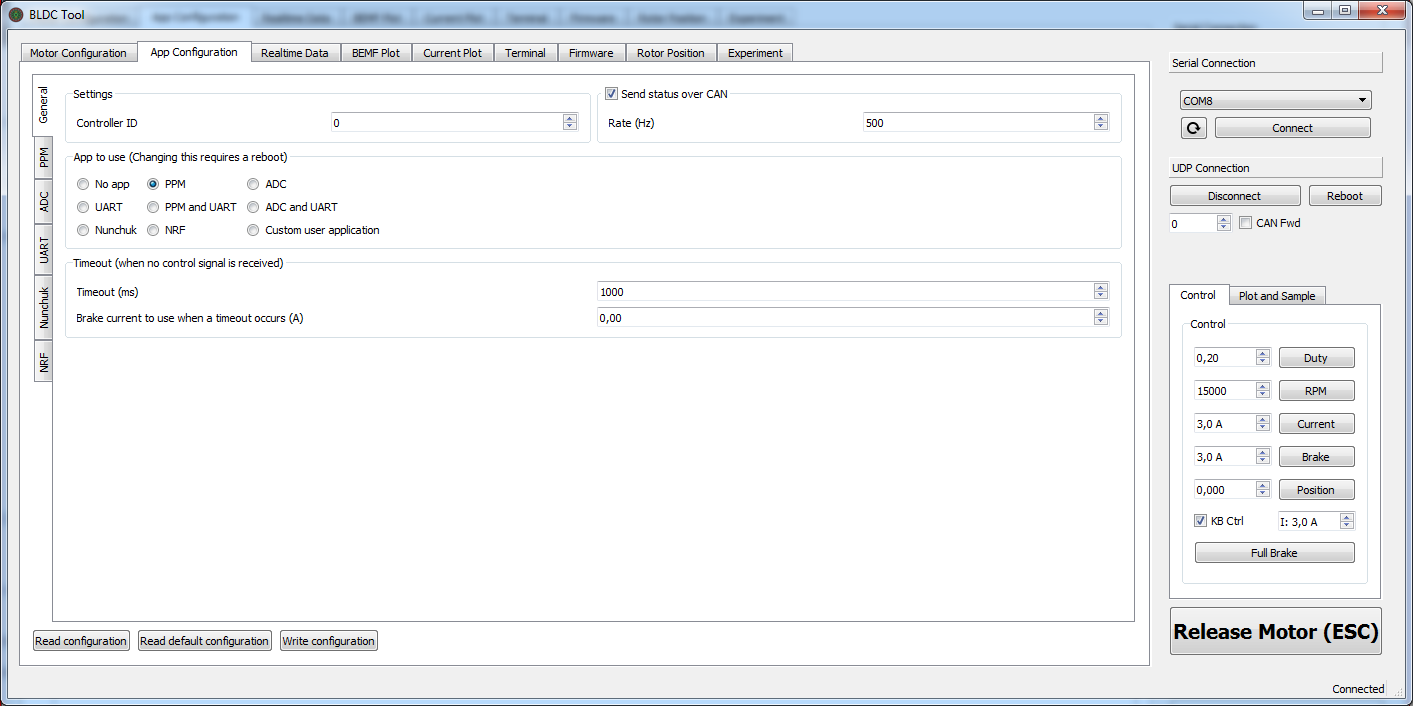
I cannot reproduce it under cold conditions at home, connected to BLDC Tool.
When i switch off the transmitter, the behaviour is correct now, as it was also in between on the water, the Timeout is 1 second.
But this does not help me too much, because i need to have 100% control, all of the time. I find it absolutely unacceptable, that this can happen at all. Seems the Fail Safe is really weak.
Is there a reason why you use the (outdated) bldc-tool?
yeah for sure, the question is: is it the esc or your receiver.
Speaking for myself I never had problems with the esc, it always was either wiring issues or the receiver/remote.
E.g. unplugging the receiver always let my vesc change to failsafe/ stop. So maybe you want to put a DMS on your board, unplugging the PPM wire (simple reed or hall sensor + transistor).
I was very happy to get rid of the safety lanyard DMS. The problem is, they are not watertight and my last DMS had corroded contacts so it does not work any more. Now i use a high quality IP68 plastic housing switch, the plastic housing is important, so even in case there is water inside the battery/ESC housing, there cannot be a connection to the outside via the main switch, which i usually touch with my left hand.
Also my experience using the lanyard strapped to my foot i found impractical. I usually start standing in the water beside my board. If the line is so long that i can do this, it can be sucked into the prop.
So i must rely on the transmitter/receiver.
Why do you think BLDC tool is outdated?
There is a new version called https://www.vesc-project.com . The bldc tool with corresponding firmwares is not developed anymore. You don‘t need to change if it still does what you want. Vesc tool supports hardware version 4, too. I run my escs with it.
There are some quite handy improvements like this tool:
You can set predefined Profiles and switch them really easy. Also a Reverse with predefined “speed”, so you can use throttle like normal with break, but if you “break” at still stand you can use it as reverse.
Otherwise there is a full documentation of the changes…
yeah, but the price is, that you have to rely on your remote…and if that doesnt work…well I would rather take the inconvenience of a dms…
Thats no solution, i would have to stop it by the lanyard DMS on a regular basis.
I have a kama wirelesss nunchuk, did anyone try this? Is it safe? Are there safety mechanisms?

This One?
I am using that at my electric skateboard, but the range is rather limited and sometimes I have some dropouts. But depending on your “safety time/settings” the VESC either skipps them or breaks down…depending if you set active brake on dropout and if the dropout is longer than the safety time.
I made some test with VESC and nano-x under lab conditions. I recorded the pulse with an oscilloscope and warmed the quartz with hot air solder set to 130°C. I varied the throttle and the pulse width seemed to be correct until the quartz was heated enough. Than it outputted 1.5ms instead of 2ms, so the fallback worked. The only odd thing was, it was still binded after the quartz cooled down and immediately returned to full throttle, without the need to return to neutral position. So there are some oddities, but i am not able to reproduce the real fail i had on water.
Beside that, this receiver is highly integrated, the component count is ridiculous low, so number of solder connections is low as well. Everything looks perfectly done. Mechanical bending of the PCB had no effect.
Maybe i should proceed with instable supply voltage or low/high voltage conditions?
Does anyone know of any weakness in the VESC which could lead to this scenario described at the very beginning of this thread?