(I have been researching and developing propellers for many years, so I can design propellers with very high efficiency for each speed mode and for each type of vessel)
In order to be able to select the correct propeller for the e-foil drive, you must first measure the torque of the drive prototype. Prior to measuring the torque, the drive prototype must be fully assembled - ie engine, gearbox, clutch, shaft, bearing, gasket and lubricant. You can measure the torque in several ways. youtube has a lot of inspirational videos. Simple design for torque measurement: https://www.youtube.com/watch?v=3pG90WreWyo31 (from 2:30). The video also shows what needs to be measured to calculate the torque
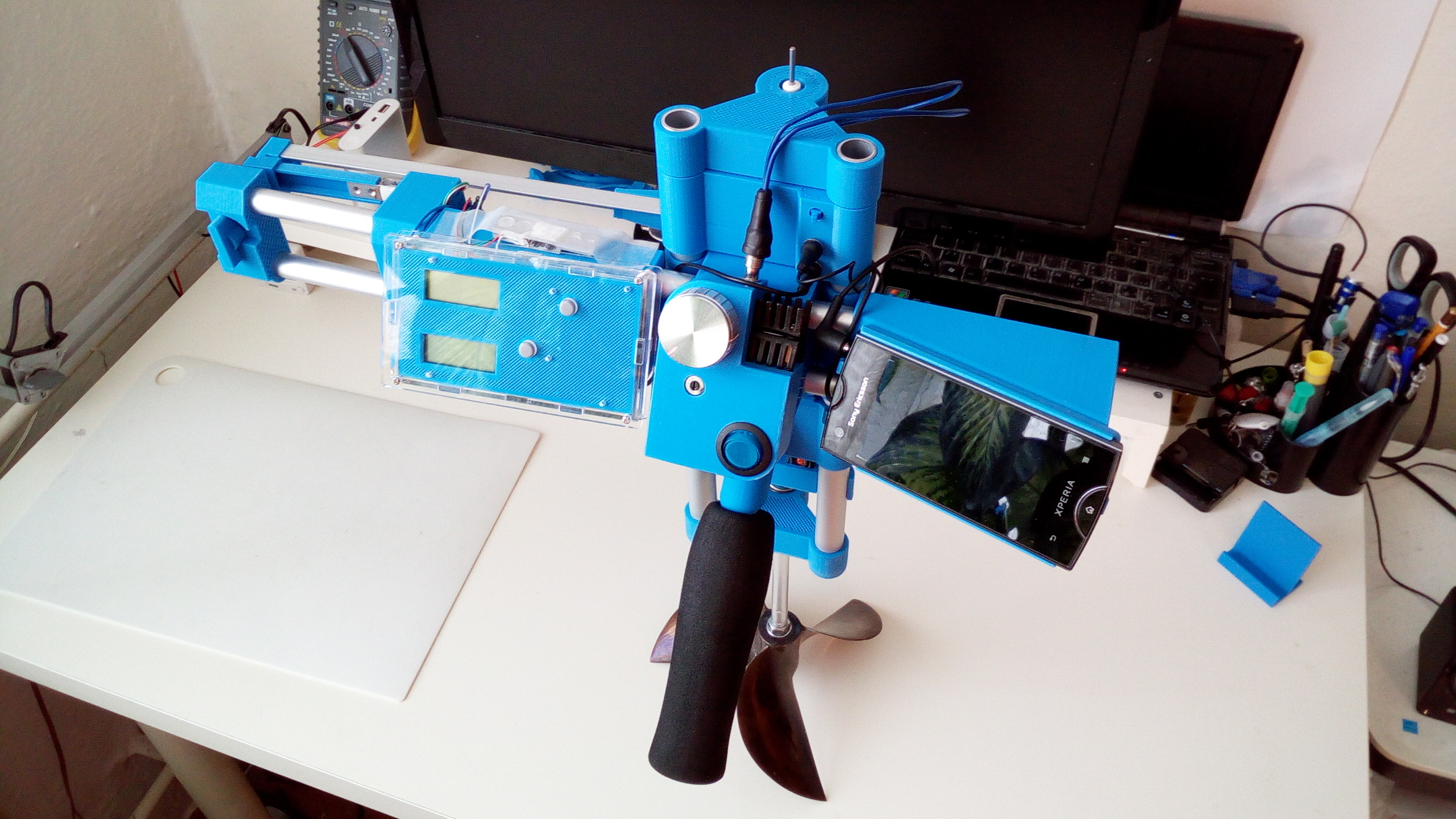
This is my torque meter
Torque measurement consists of the following three steps:
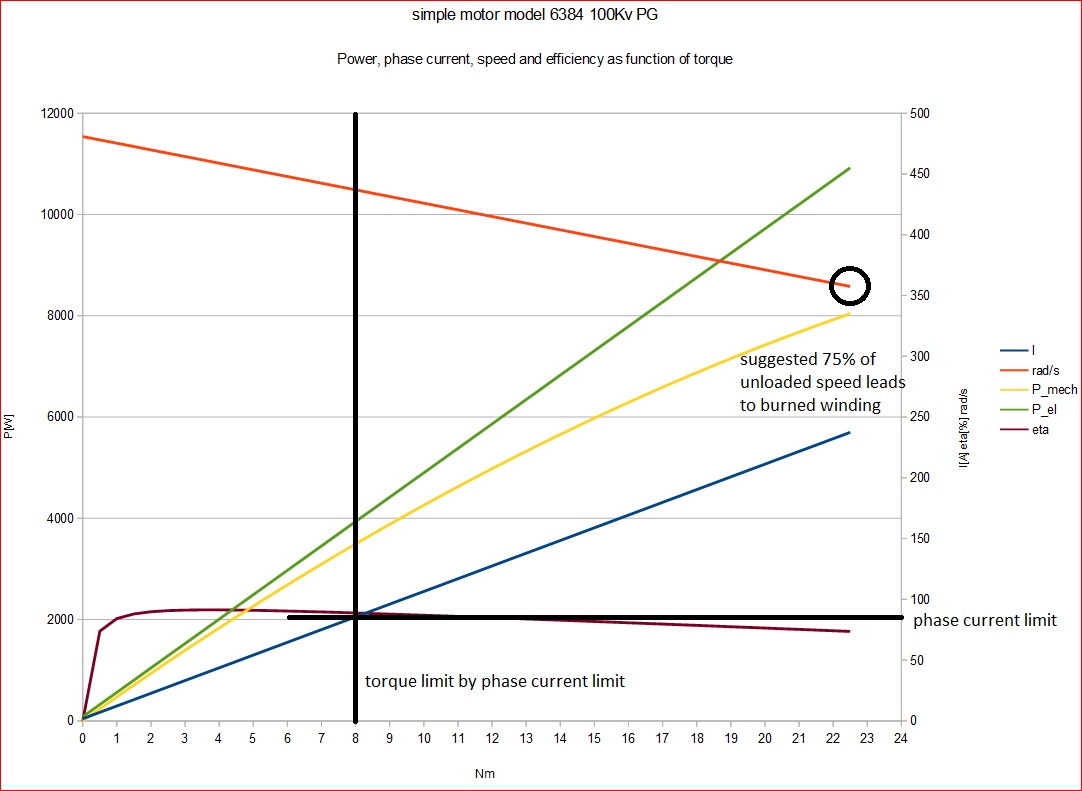
Step 1 - First determine the maximum engine RPM. The engine must be separate, nothing connected to it (transmission, clutch, sealing, etc.). The battery must be fully charged. The speed controller turns to the maximum and the RPM is measured with the speedometer. The RPM data is then permanently recorded.
Step 2 - All other parts of the drive - clutch, gearbox, shaft, bearing, gasket, lubricant, will be connected to the engine. This complete drive connects to the torque meter. The battery must be fully charged. The speed controller is rotated to the maximum. The drive shaft speed is decelerated mechanically by a brake, propeller, alternator, etc., so that the engine speed is only 75% compared to the measurement in step 1 (engine manufacturer or some literature recommends 70% RPM, etc.). The arm pressure (g) is then permanently recorded.
Step 3 - Finally, the torque (Nm) of the known formula is calculated from the arm (g) pressure, arm length (cm) and RPM. The calculated torque value is then recorded permanently.
All the data found in Step 1 to 3 are needed to find the right propeller. Without these data, it is almost impossible to find (buy, produce, design) the correct propeller for e-foil.
NOTICE
If anyone has an interesting question about torque measurement, I’d like to answer the question. But I will only give the answer here to this post! So I will not create new and new posts anymore, because the topic would become very confusing and would have a lot of unnecessary contributions.