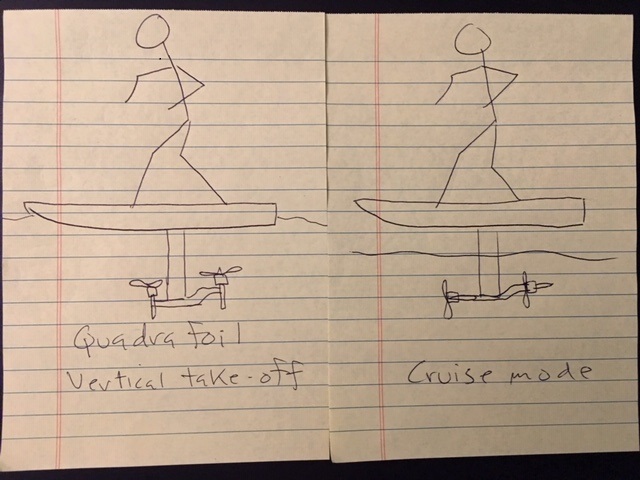
Only half way through my first coffee this morning so I hope this idea will still seem plausible as I wake up. I am picturing an efoil that uses drone stabilization. Four smaller motors and ducted props; each motor mounted on one of the four wing tips.
For take off, the props are thrusting downward and the craft is stabilizing with the help of gyros and accelerometers. The board can be very small since ii is not used for take-off lift, just big enough for the rider and batteries and electric stuff.
In cruise mode, the rear thrusters are mounted a bit higher as shown so that the thrust system can add some pitch stability in forward mode.
Higher power is needed momentarily for the vertical take-off.
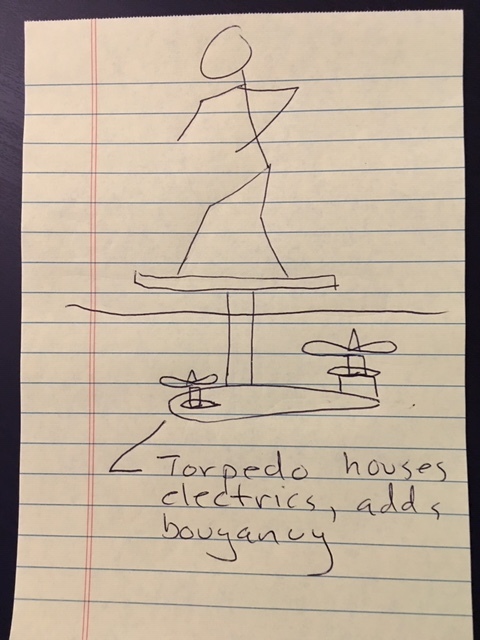
Another variation of this VTOL idea would be to include a torpedo in the lower section of the foil. This would allow all the electrics to be housed below (good for cooling) and the torpedo would add significant buoyancy. The buoyancy would greatly reduce the power/thrust required for the vertical take off. It would also reduce the power need for forward flight at low speed, but would add more drag at higher speed.
The board would only need to be the size of a skateboard…just big enough for the pilot to stand on.
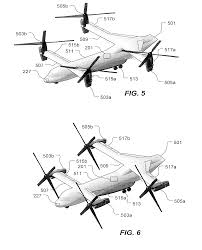
Not only plausible, this “Flying car”, more a multi-copter in fact, could be transformed in “Diving car”. When 4 motors can do better than 1, it is time to miniaturize the LIFT-Flying Rodeo motors.