I’m using the prop from flipsky 7.5in 5 pitch. I cut it down to 144mm with a cnc. But it can be done with a dremel or other hand tools. The reason to make smaller has been discussed a lot on the form. Basically the 7.5in is too big for the 65161 to get into an rpm range where is produces enough power. 144cm may still be too big. Meanwhile I have a flite prop I am going to try.
Installed a flite prop. Holy moly it is so much better than the cut down flipsky. Chickened out at 38kph. Much more efficient and almost silent. Trust me just get one.
1 Like
Ordered!  thank you!
thank you!
With your help, I found several potential Issues
-
S*itty prop. I can bend it with my hands. So I already printed one. Much stiffer and a bit smaller. I will also order Flite prop.
-
Motor slide down to fuselage.
The image shows a fixed state, However, the line where it was before is still visible. When the motor bracket loosened, the propeller hit the fuselage But what is weird, When I hot fixed it. it didn’t have any significant impact.
But what is weird, When I hot fixed it. it didn’t have any significant impact.
-
Current limit
I also need to increase the current limit. But I am a bit afraid. So I will do it incrementally

I plan to acquire some data during a static test at a swimming pool with different propellers and current configurations and I will share the results with you soon.
There are dimensions in this thread. All you need is to ream the 10.95 part to 12 and it fits and works great.

I did a static test in a swimming pool with the following setup:
-
First : big 3d printed 161 mm prop, Motor Max Current 150, Motor Abs Current 400, Battery max current 150 and the result is the following:
The RPM saturated 40% of the duty cycle -
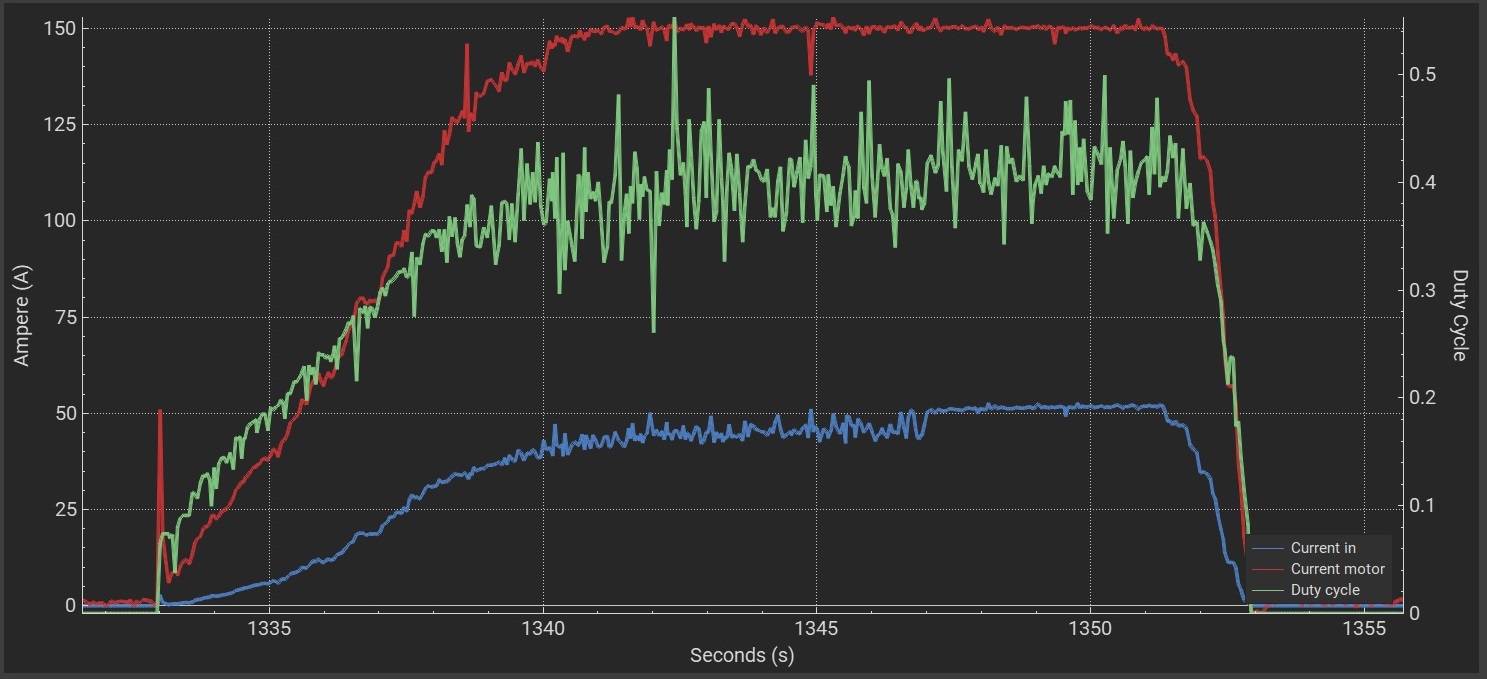
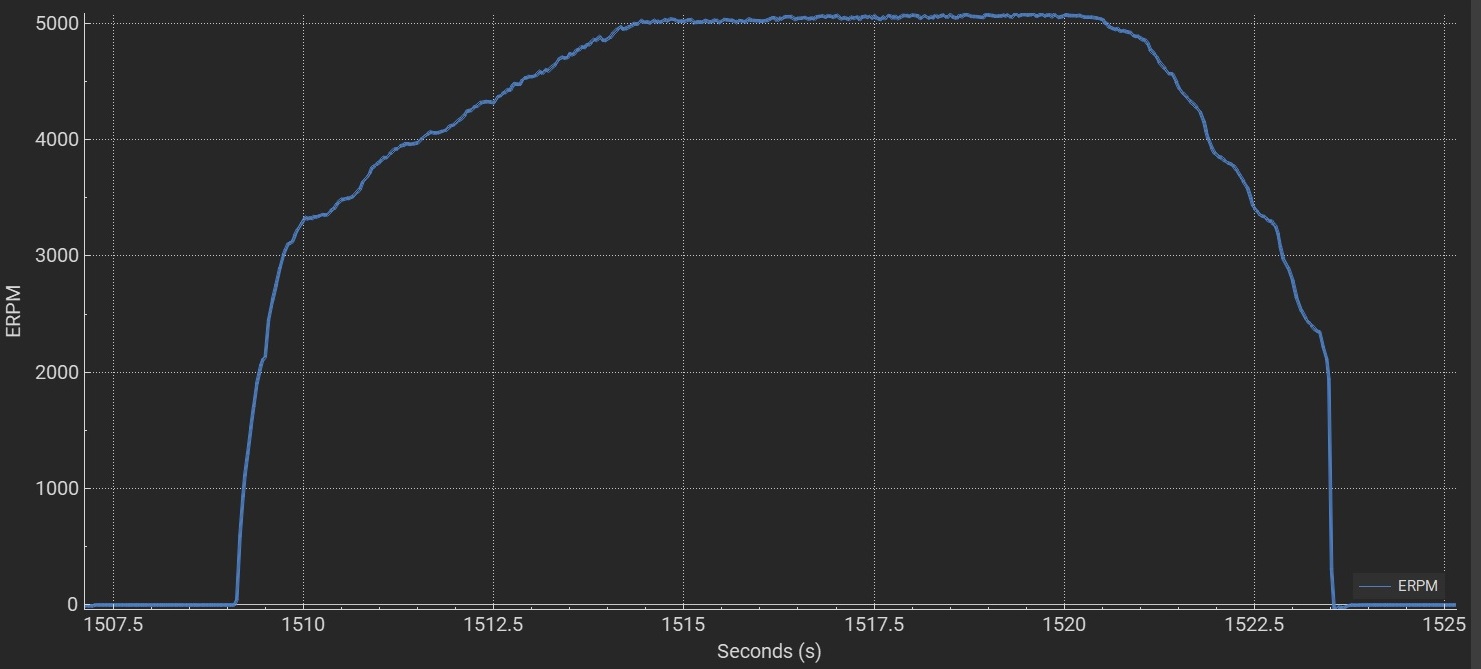
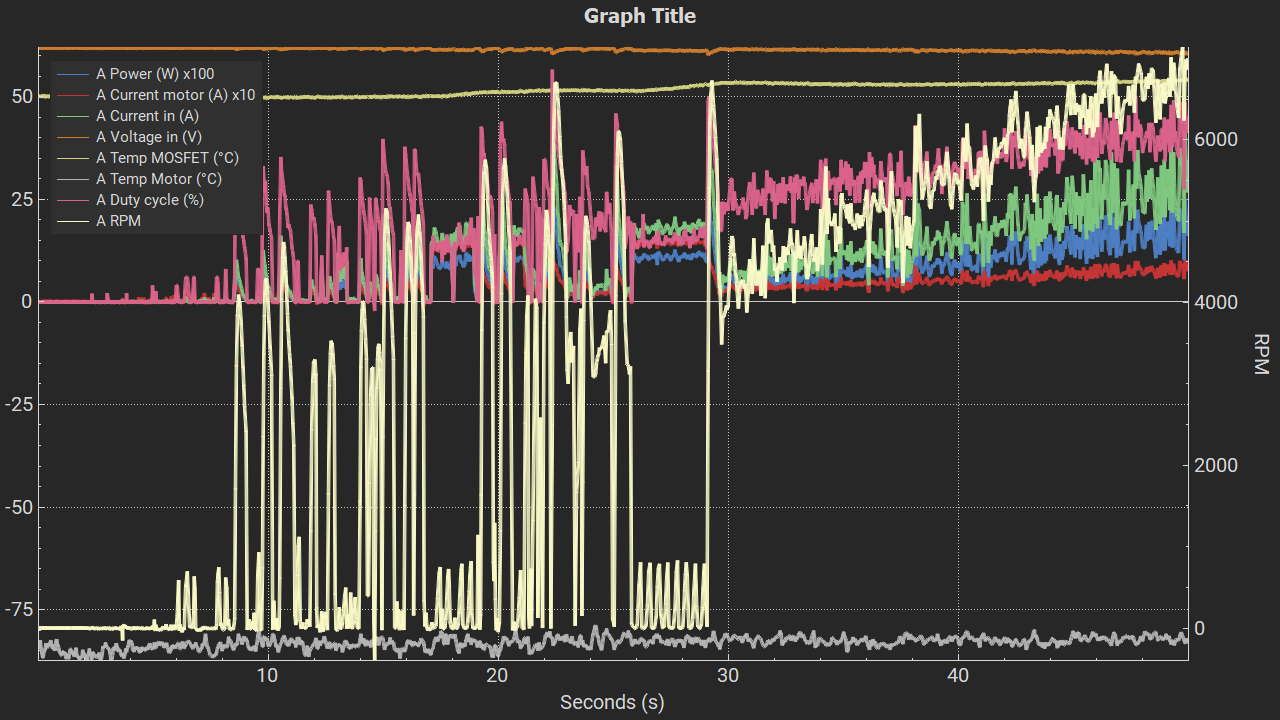
Second: small 3d printed 141 mm prop, Motor Max Current 150, Motor Abs Current 400A, Battery max current 150 and the result is the following:
The RPM saturated 60% of the duty cycle
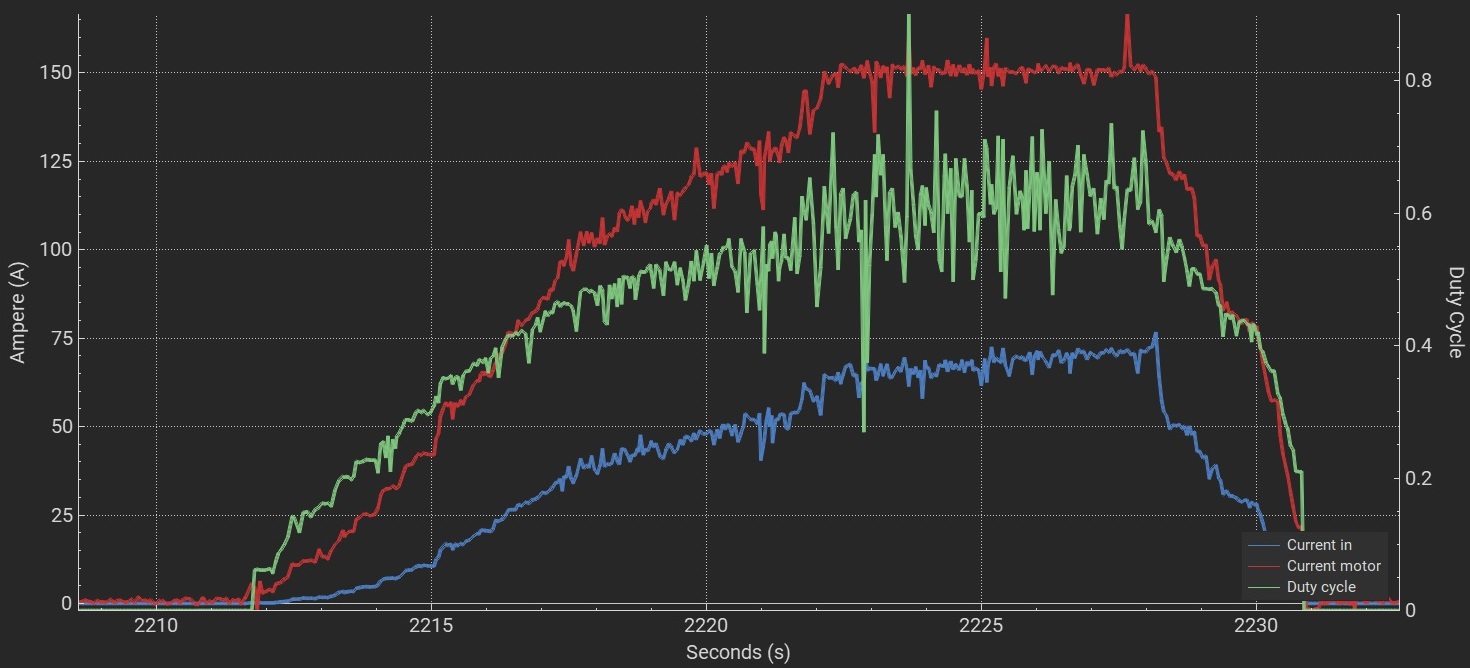
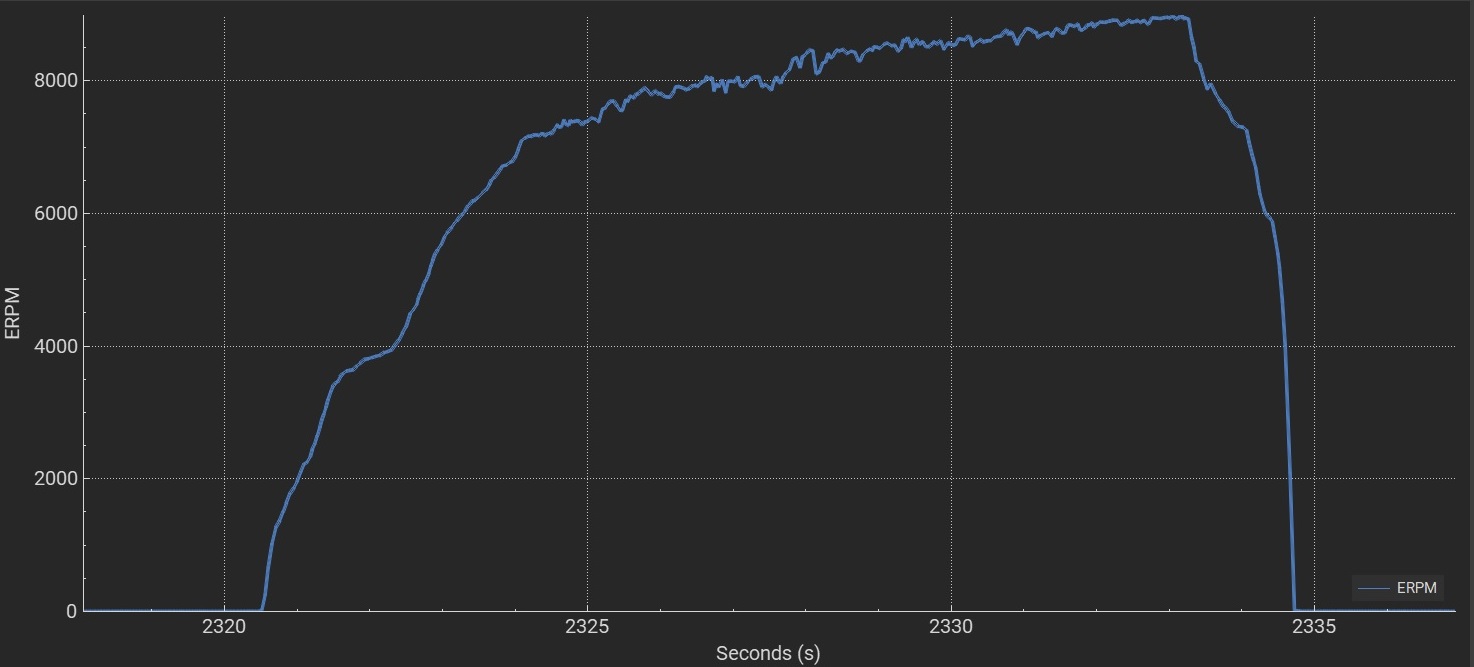
I also do some predefined tests but I have no idea what does it mean. (small 3d printed 141 mm prop, Motor Max Current 150, Motor Abs Current, Battery max current 150)


I guess that 150A motor current and smaller prop helped. But I do not know if it is enough and how far I can go with the current.
Can you get rpm in the graphs too? You need to reach at least 50% of the unloaded rpm or you don’t use the power capability of the motor.
I do not know how to get the rpm to the graph. But each the single line graph is RPM and was acguired with same setup as “current” graphs. With small and stiff prop I get much higher RPM.
Well, i do not know what is the unloaded max RPM, but acording to specs :Max Spin Speed(RPM): 16380. Which is rather theoretical value, isnt it? I can reach cca. 9k rpm which should be ok. I am still worry about the current. I do not want to fry my VESC. I also want be sure I tuned everything vell before I go to the lake.
I didn’t see before but beige line is rpm, but why is the graphs so messy? Is it running ok during the tests?
Your unloaded rpm should theoretically reach roughly Volt x kV so for max power output it’s
16 x 3.6 x 120 x 0.5, about 3500rpm or the prop is too big to allow the motor to reach full power during starts.
This calc is naturally affected by the voltage and kV you run, especially on efoils where there is a max threshold at starts it doesn’t mean that you won’t get up due to this - but it means the motor isn’t allowed to reach it’s max potential (during starts) because it’s overpropped.
Yes, when it reaches maximum rpm it feels stable, also the ramp up was ok. I use 16s9p
Ok now I understand. I was a bit confused with RPM and ERPM. However, if you have a look at the last 3 graphs (automatic test or somethink like that) the control of motor is driven only by VESC itself. The RPM (beige color) gets much higher than when I push max throttle on my remote.
It looks like there might be issue with my remote settings or wiring.
I will do another static test but i will control duty ctcle over VESC tool and I will see how far the RPM can get.
Btw. The rule of 50% of unloaded RPM… what is the rationale behind that?
Thanks for your coments.
1 Like
It’s caused by:
Produced mechanical motor power being torque x rpm
and max motor torque is at zero rpm
and zero motor torque is at max rpm
so it’s a physical/mathematical maximum issue from the multiplication of torque and rpm to get power
I did some improvements on my efoil.
- Installed Flite Prop
- Installed new motor holder - Motor doesnt slide down now
- Downgraded WF to 5.2 - Motor detection works much better now.
The result is good (not perfect) I could get the efoil out of the water for a while. But only twice. After 5-10 minutes I could reach the speed needed for foiling anymore.
Possible reasons:
-
Lower voltage After cca 15 minutes of foiling the voltage dropped from 65.5 to 62.9 (Unlikely…)
-
My foiling skills Yes am totall beginner. But why it worked in the beginning and then I couldn’t make it again?
-
Duty Cycle Current Limit Start was at 85% For some reason I had this limit
-
Rifle case efoil is just not for beginners I do not know… maybe I should just keep on trying…
My setup is:
- Battery: 16s9p 144 samsung cels 27mAh total
- Motor: Flipsky 65161 120KV
- Remote: Maytech Eskate Remote for Electric Skateboard VESC MTSKR2005WF V2
- VESC: Makerbase VESC 75200 V2 84V 200A

Any thoughts?
Thanks!
I think it’s too short time to be anything else than overheating / temp limiting of ESC.
The abs max current limit should probably be lower, this is not related to your issues now but still. 300A.
And yes, rifle case efoil is not the best for beginners, not impossible but a normal board is easier. On the bright side, if you learn on a rifle case then any floating object later on will be an improvement😄
3 Likes
I should have thought. I guess I can improve the vesc heat managemet. Thanks for your remark!
Hello,
can you tell me how did you fix mastclamp to mast without sliding, I was thinking of maybe drilling a hole for pin through the whole mast clamp and mast, later put in there to fix the clamp to mast?
Is there something else I can do besides adding some thermal paste between VESC and aluminum box and maybe some extra heat sink?
Confirm what temp you get first, (i think you can just get Vesc tool app and your phone in a plastic bag so you can check while riding)
Countermeasures depends on which esc variation you’ve got (pcb only/water cooled/with alu enclosure) and what kind of box you’ve got your stuff in.
you could also try lowering motor current (lower heating) and match it with what you need to lift.

