Hi everybody,
my name is Roberto from Italy. After more than one year of developing in electronic solution and software I have reached a good device of remote controller for my foil drive assist system.
Now I want to share my project to extend the work to others on the philosophy that the improvements never end. Collaborators and builders are welcome.
Features:
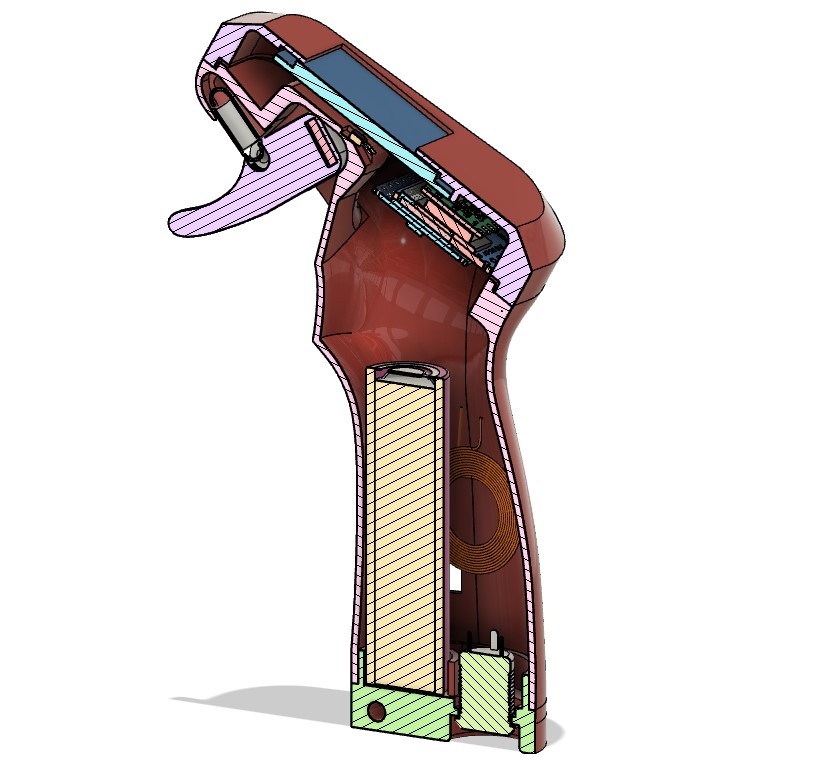
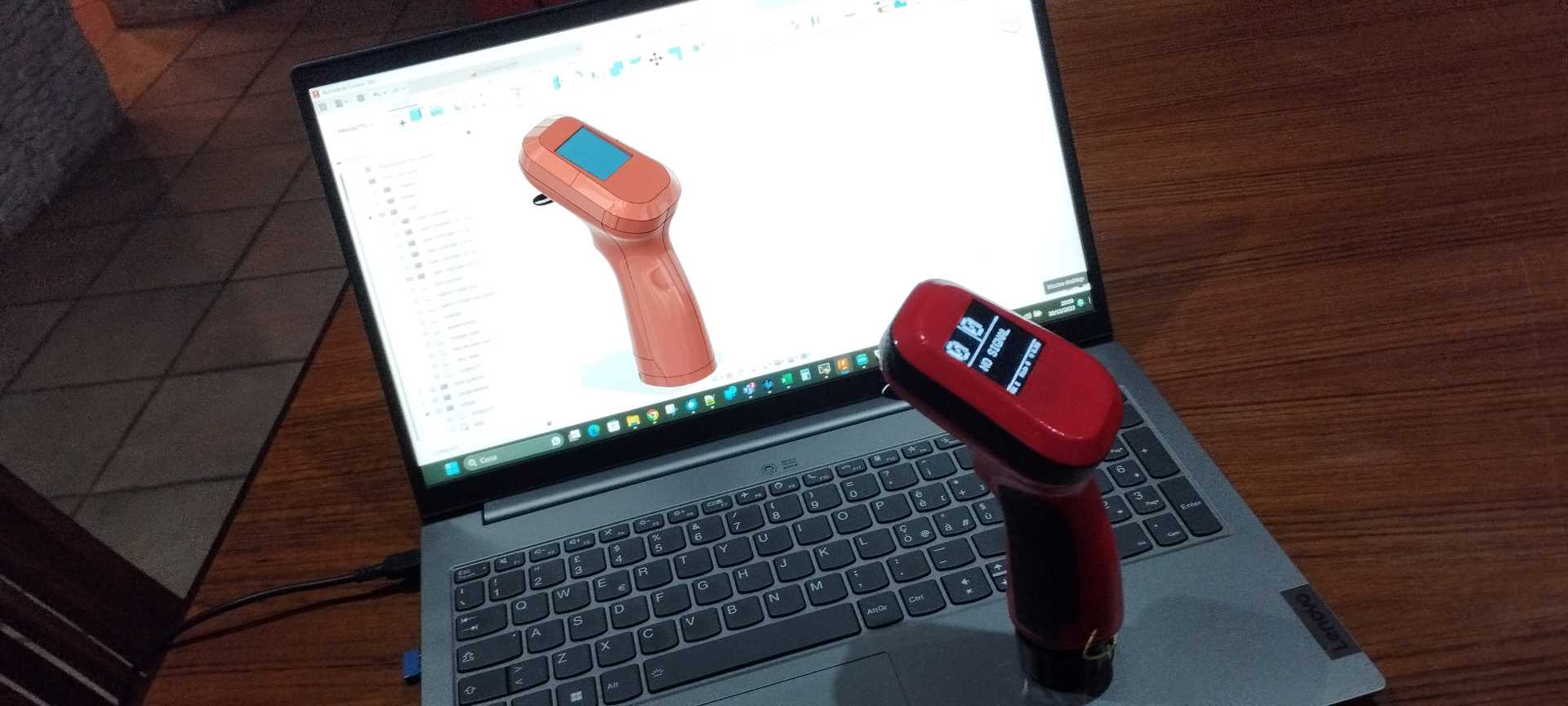
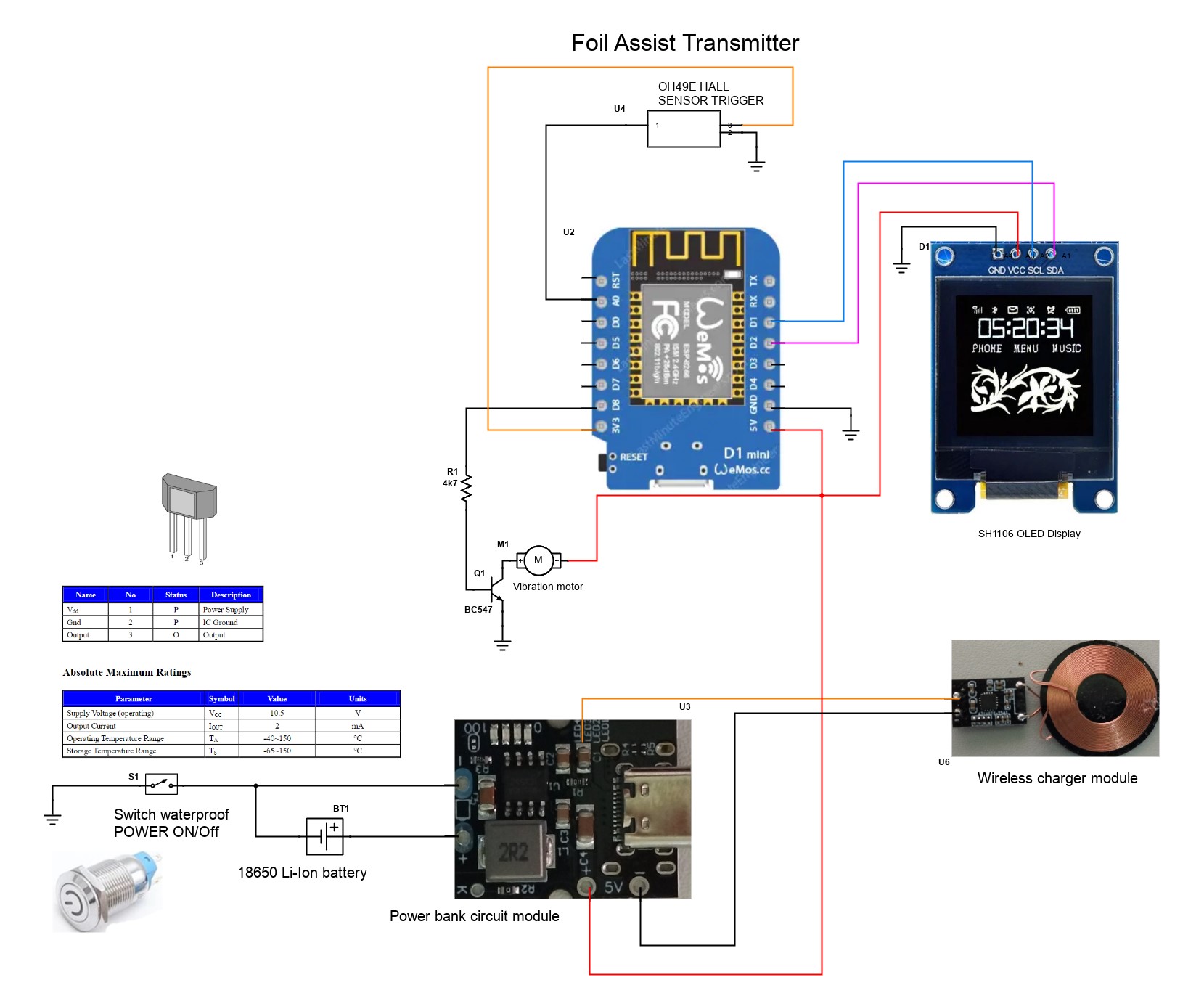
Ergonomic case in 4 parts by 3d printing diy
Display OLed 1.5 inch
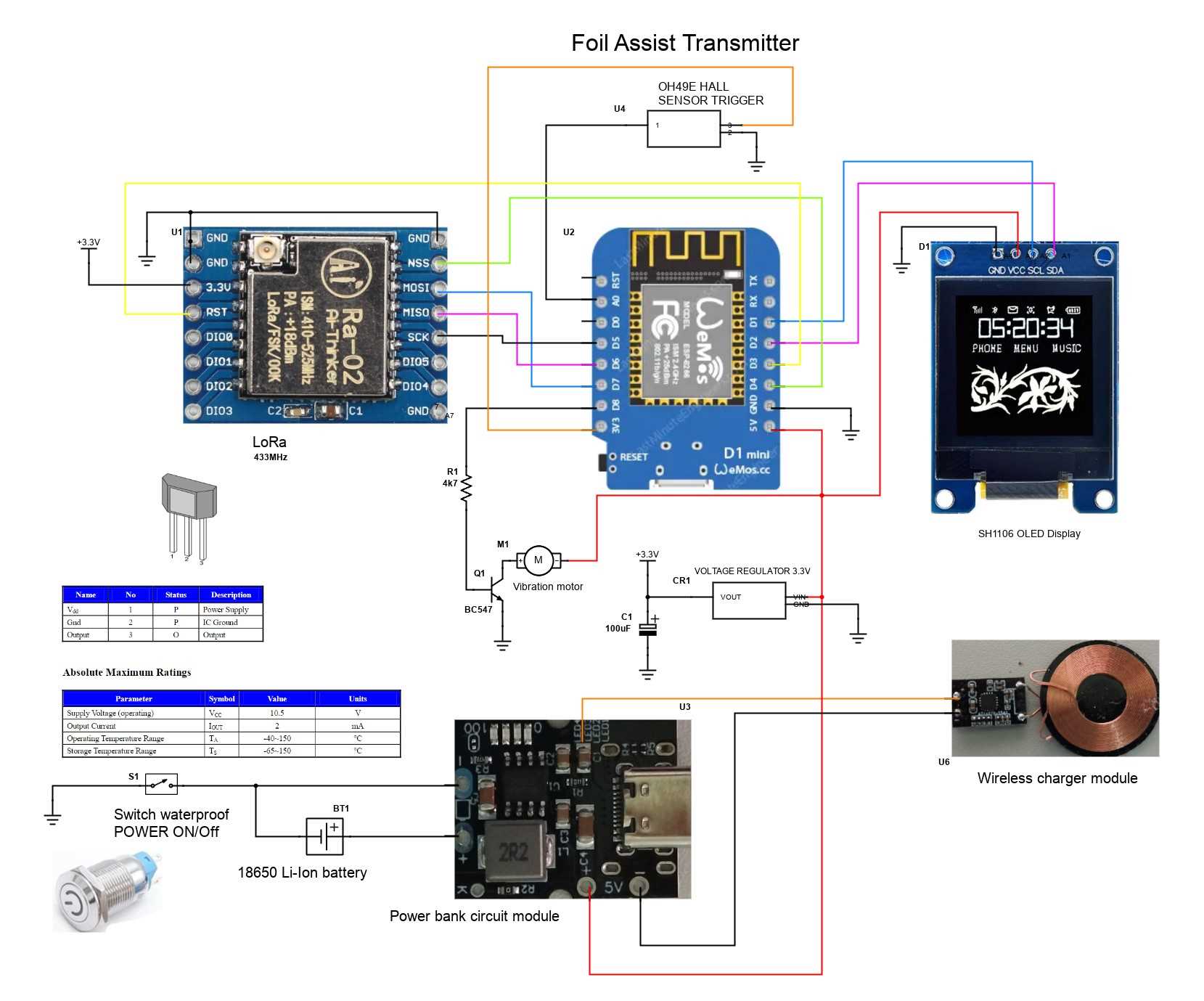
Wireless communication at 2.4GHz and 433MHz (dual Band)
Firmware upgradable by server (WiFi)
Recording VESC data of last 10 ride in the internal memory of the receiver txt and json files
WiFi hot spot of the receiver to analize data and setting
Vibration alarm for battery low
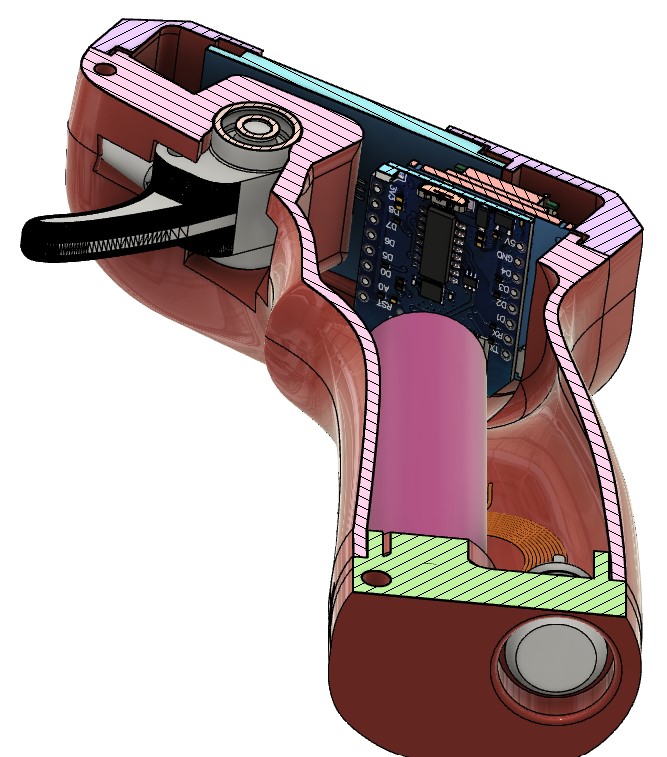
Plastic bearings on trigger for precision control
Integrated battery 18650 2200mAh (10 hours)
Wireless charging system
Trigger’s spring interchangeable
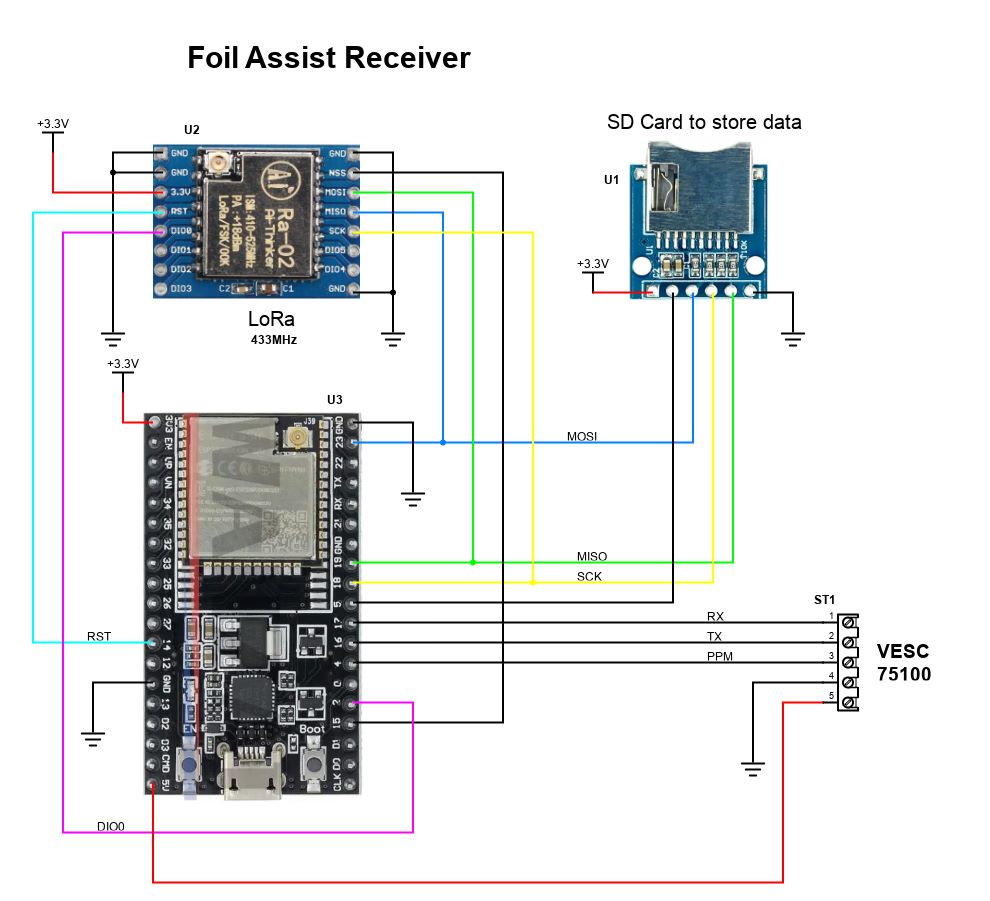
Most important problem of a radio remote is to work in the water. I tryed to send the trigger data in parallel on two different frequency channels with different modules. The result is that the 433MHz helps but there are two different antennas to place.
The assembly of moduls is not very hard, at moment is not available a main PCB.
What is really important in the building is the coating and filling with epoxy resin of the entire body of the controller and the display in the top pannel to be waterproof
Regarding the receiver board I coating by resin it with the VESC in the box
link: www.foilassistproject.com GitHub - assiro/foil-assist-controller: Radi controller for foil assist system Remote Controller Foil Assist - Google Sheets
Hi,
on the screen of the display you can read:
during the ride:
percentage of battery
Power consuption in watt
percentage of throttle
with small caracters in rotation:
average of power
total time of ride
motoring time in the ride
power index (index of rider performance)
After riding (no throttle pressed for 2 min.)
total time of ride
motoring time
battery voltage
power index
average of power
In the receiver there are many datas to show. The receiver generates an wifi hot spot where is possible to see the web pager by a browser… but after rides
In the video below you can see the controller working
Hi,
yes LoRa improves the behavior of the communication in the use of the system in the water.
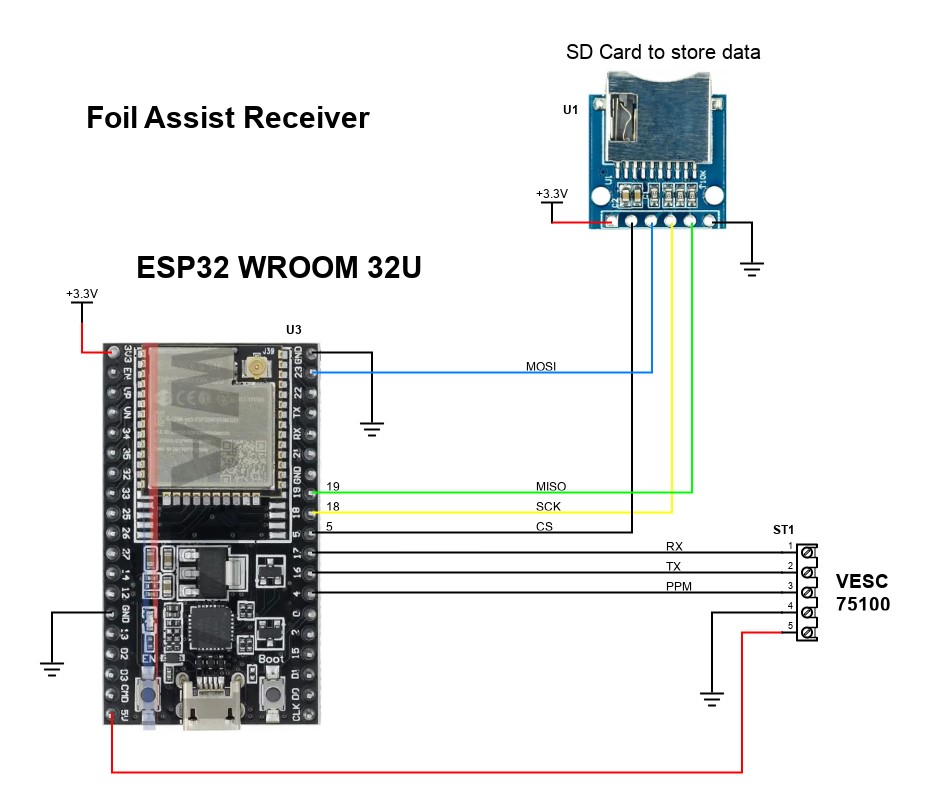
But, I suggest the first time to use the easy circuit with the ESP only. More easy to assembly and works fine any way
Basically the most important point is a good antenna at 2.4GHz.
On the SD card of the receiver is also stored if the signals (LoRa and ESPNOW) are lost.
The connection with VESC is serial uart only by wire
Concerning the setting phase you can connect to the VESC by USB or BT with the vesc tool software.
The control of the motor (by PPM) and the managing of the data during the use is different. This is what the receiver does
Yes, but you Can also directly start and stop the vesc from the phone BT and use the phone as a remote. So probably the remote could skip the receiver alltogether for a vesc with built in BT
The receiver board takes care about the managing of entire motoring system, not only the communication with vesc.
My approach in the remote project was to controll the VESC by PPM signal (direct control) and stop the motor (with delay) if the radio connection is lost due the water. This is at the base of the safety of this system
The remote control firmware analyzes the data during the ride to give you more informations that the vesc has (status of battery, alarms and more)
Printed your parts, will use all you prepared for battery, sensor, screen and charger, and will try to make SW to connect direct to VESC BT. If that does not work, I will test your software. Thanks for sharing!
This is a really exciting project, I just finished building a Gen2 FD type system but I am using the bremote controller which I love but I am having connectivity issues since the whole unit is under water. Every time I accelerate and start getting to my knees it failsafes and I go flying over the nose. I was planning to use a U.FL to SMA connector and to just run an antenna all the way up to the nose on the deck.
Your project might solve this problem without needing to do all that because of the 433mhz.
Would your system be compatible with a normal Blheli_32 ESC connected with just GND, 5V & SRV? The only other function that would be kinda necessary is VBat analog reading for the foil bat.
I can take some later, the good news is I have taken it out twice and spent about 3 hours in total on it and there no water ingress. I just need to get the RF issue sorted out.