Last year i made an electric surfboard. I used a 4092 motor, a 6c battery, gearbox for a bicycle, same as in my current project, a 2:1 belt drive from the motor to the gearbox, and a 7 1/4 * 5" propeller. Total ratio 9:1. I got such a big thrust that I first I couldn’t stay on the board, lying on it, it pulled forward from under me. This is about the question of how small a motor can be installed. My weight is 70 kg, the weight of the board then turned out to be about 15 or 20 kg. motor, belt and gearbox stood inside the board.
It won’t work that way. Either the motor or the esc may burn out, or the esc will not supply current to the motor. It is necessary to measure in dynamics when the shaft rotates. I have seen homemade stands on the Internet that use either mechanical or magnetic braking to measure torque.
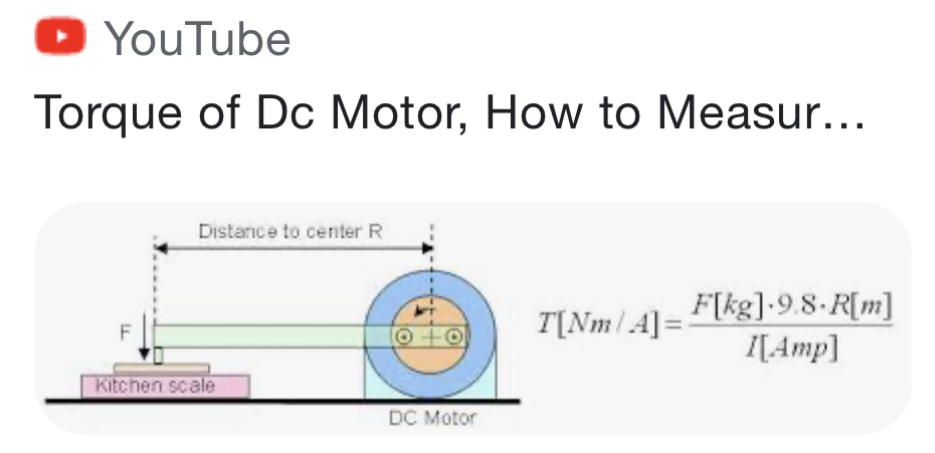
Yes, Robert. I misunderstood you about measuring torque. Now everything is clear to both of us, I agree with the diagram you gave. Only I don’t have a pool, and now it’s winter. I’m thinking about how to measure on the table. How to brake the shaft: with a mechanical brake or magnets. I will try.
Yes, it is very difficult to get waterproof printed parts. I spent a lot of time and plastic on samples.
The gearbox is really expensive.
But you managed to make a printed one. You write that if you make a gearbox with a large ratio, it will turn out to be very wide, if I understand you correctly. But the gear stages can be arranged one behind the other along the axis of rotation, as in a screwdriver. Or will plastic gears not withstand high rotation speeds?
You certainly have the Vesc Tool or maybe a remote giving you some data like my flipsky vx3:
When you run the motor it gives you RPM Amps Voltage and most important power (Which is Volt * Amps) .
Thats enough to calculate the motor torque.
If the motor has 90 % efficiency ( which is a good start) take only 90 % auf the value you calculate.
You will be accurately and just a few % off.
So Power in Watt devided by RPM in Rev per Second ( I must doublecheck that unit as my physics exam is 40 years gone, the value is called omega) should give you torque in NM
Of course, Robert, the laws of physics also work in winter.
Only the motor needs to be loaded with something, otherwise it will not produce power, it will simply gain maximum speed, and that’s all. And will consume little current. I still have doubts about measuring current and power using vesc. I’m not sure if the vesc draws constant current from the battery rather than pulsating current. I ordered a shunt and will look at the current waveform on an oscilloscope. And yet I want to measure the mechanical power.
I have already started a stator from an asynchronous motor with a permanent magnet rotor from vesc. The rotor rotates, but I can easily stop it with my hand. Now we have to rewind the stator winding. I’m not at all sure that I’ll get 90% efficiency. in the stator the plates have a thickness of 0.5mm. They’ll probably get warm. I’m just interested in measuring the efficiency and taking the load characteristic.
No, Robert, I didn’t say that the propeller needs to be bigger. I was talking about using smaller motors. They often have a lot of power, but they have a lot kV, that is, they are able to reach high rpm, but they produce little torque. That is, you can calculate the gearbox in such a way that the torque on the propeller remains the same, but on the input shaft there will be high rpm with a small torque.
UI= Torque x Omega , only if Omega in radians per second, where one turn = 2*PI radians and 1min = 60 seconds
N rpm = N *2 PI /60 radians per second
So UI = Torque x (N x 2xPI / 60)
Torque in Nm = UI * 60 / (N * 2 * PI) where N in rpm
Gearboxes were the norm before the 6516x motor and wet outrunners and then hardened metal gear planetaries were used. These were noisy and seem to fail in use after some time so the 3d-printed versions don’t offer much more promise than as an fun engineering exercise.
If you still want to take this further i’d try to order some gears from iglidur® Designer
They have a printing service with low friction engineering plastics that isn’t so expensive really (at least wasn’t before the ukraine war, now all print services seem to be 3x the price)
Not actually a step back in time. Gears have a place, but probably more in a DIY setup. Gears cut from acetal would be great. It would be interesting to see how small a motor you could get down to with a geared setup. I definitely wouldn’t bother gearing down a direct drive motor though…
the SSS motor builds are well known? And how would the plastic gears be better than a real planetary gearset? I fail to see the logic.
The other thing with looking for smallest motor geared setups is that you will max out the rpm to be able to get the appropriate power and speed when geared down for the torque needed. It can be exhilarating for one session riding the screaming banshee, then tiring for the rest of the lifetime.