Cutting edge technology. So called supported propeller. Gives extra speed!
2 Likes
After more than two months building the tow-boogie with bremote v2 is finished.



Lots of power, enough to get onto foil. The only thing that I need to fix is a bit of torq-steer. It leans to the left once more throttle is applied. What can I do to fix this?
1 Like
Since you are using vesc, and if you are in current control: the motor that turns too fast (right motor in your case), in that vesc just limit the max motor current to 10 or 20 amps lower. Leave the other motor and vesc as they are
Since with current control, the vesc will apply 0A at 0 Throttle and max-motor-current at low throttle you basically decreased that motors power linearily which should get rid of the effect.
Just need to find the optimal amps to subtract by trial and error
… oh wait, you only have one motor… well forget that solution then…
Is the motor steered with a servo? Or no steering at all?
I will add another motor but first wanted to feel the power of one. No steering
Understood
Well then I would just slightly rotate the motor or stick some fin into the water
I have some fins. Vertically or at an angle. What do you think
For me that would be trying the ones you have until it works ![]()
Two motors will naturally counter torque roll ![]()
I have a 2x 6384 setup. Only problem is nose up, i need an extralong rope atachment stick
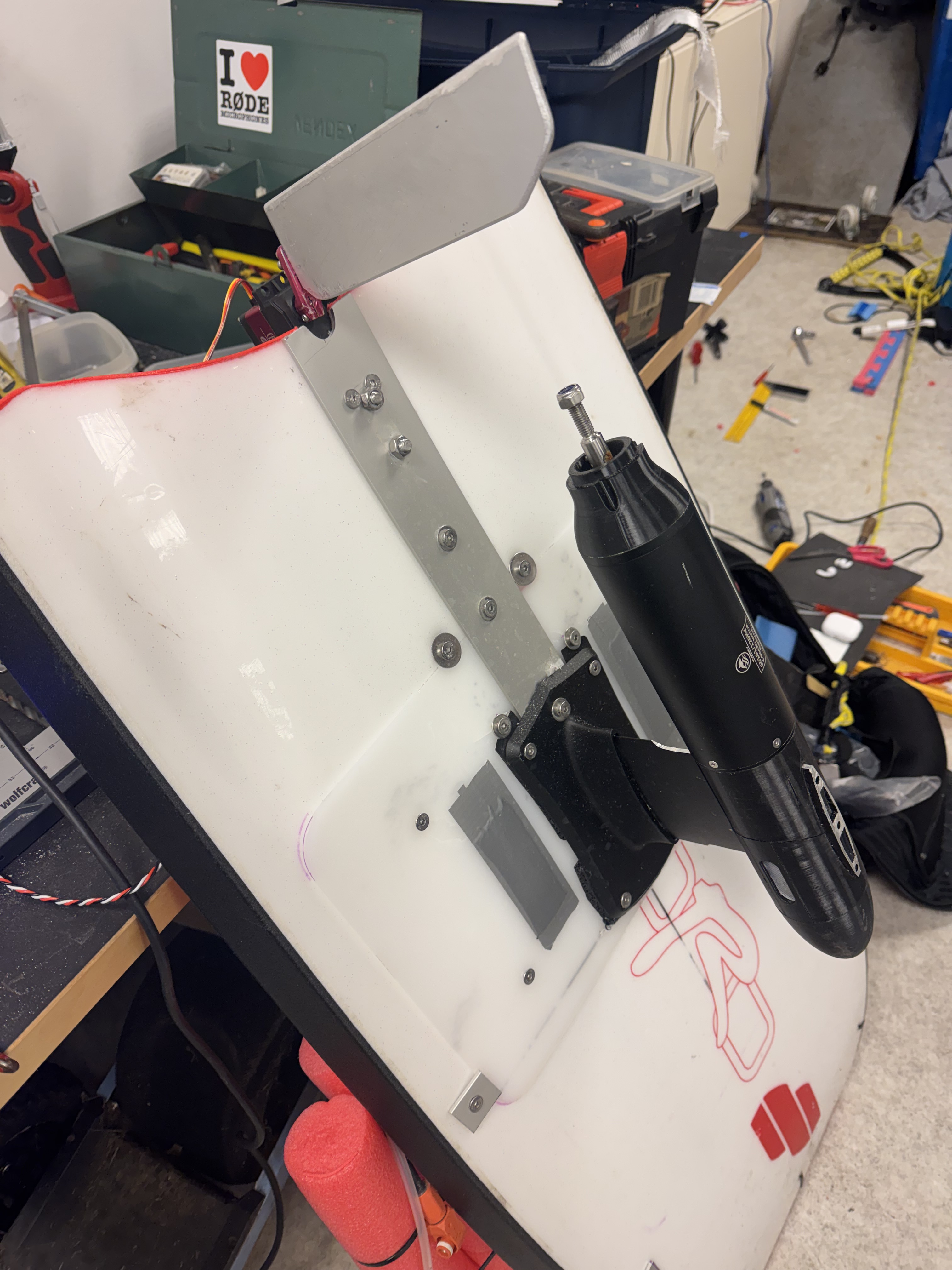
I moved the Pelican case to the right side and put the motorpod a bit higher. The result is less torq-steer and more control even in small waves. Enough power to get on foil with a midlength and 1350 APF foil.
I want to use a rudder to steer the tow boogie. Was thinking of a waterproof servo with a direct attached rudder. Anyone examples? Need some advice.

2 Likes
@ludwig_bre Hello Ludwig, I have added a rudder to my tow boogie. A digital servo will steer it. To test if this will work with the remote, I made a setup with a micro servo connected to the receiver board. I uploader the latest firmware to the Tx and Rx and configured it all for a VESC with servo. When I test it connected to the USB port the servo will not move at all. The serial terminal software shows that the transmitter is sending a throttle and steering signal. Because it is a micro servo it think that it should work without BEC or external battery. Or am I thinking wrong?
You always need a external BEC, the Rx will not output any voltage or even signal without external BEC on each port
I have an extra battery LiFe that powers the servo directly. Positive to the servo, negative to the Rx board and servo. Signal to the Rx board. Can I get that to work without BEC. The VESC is powering the Rx.
What do you mean with each port?
You need to supply stable 5V (not raw lipo voltage) to E1 or B1 as well, at the moment you only connect GND and SIG, but you also need to feed 5V from some stable source into B1 or E1, just like shown in the connection examples
Can you post up what servo and rudder you bought?
It a 60kg 8.4v servo. The horn is directly mounted on the servo. But i have decided not to install it but go for the dual motor. It was too flimsy at the end.
After testing the single motor setup for a while, I decided to finally go for the dual motor. Finished the electronics yesterday.
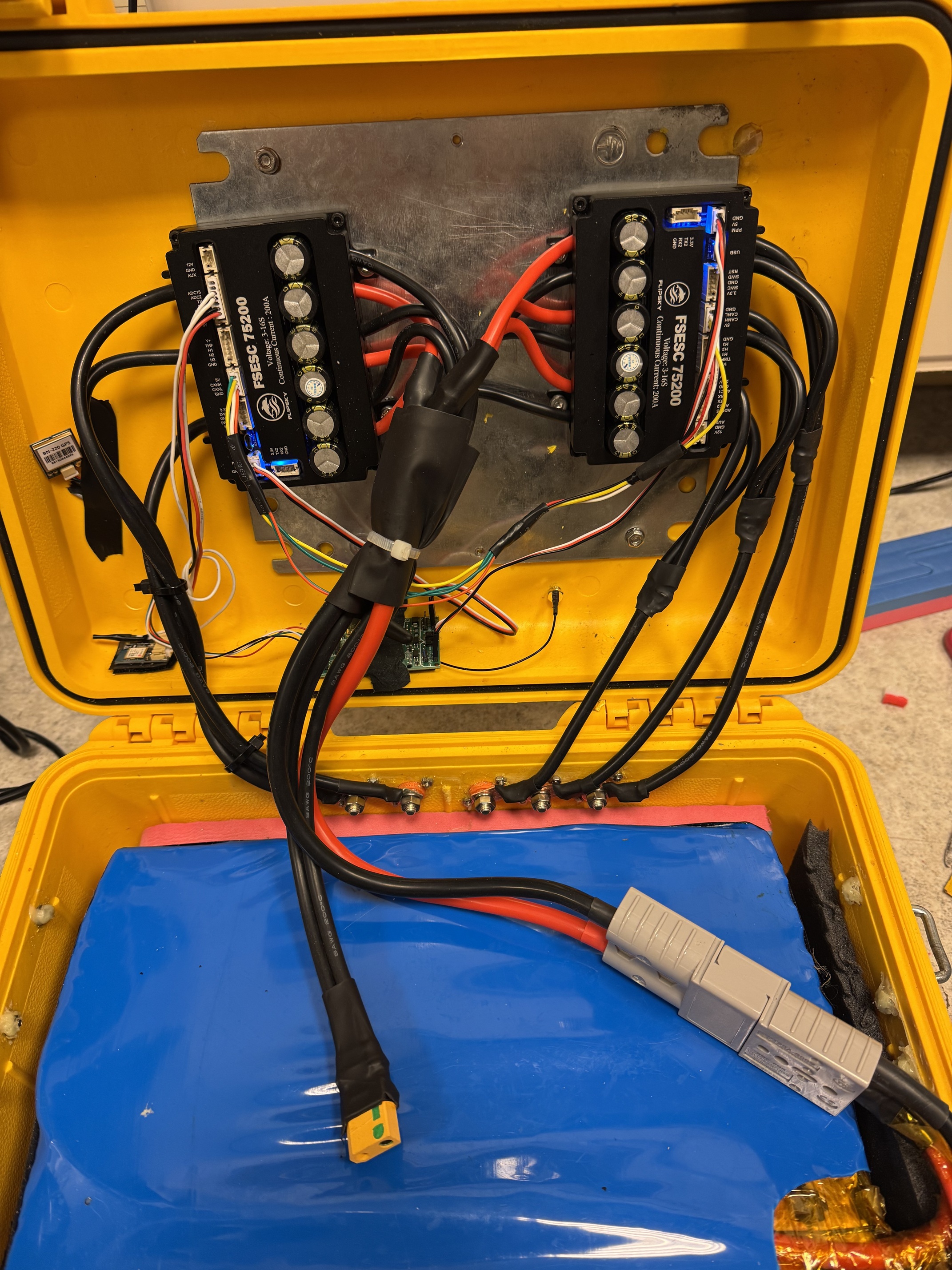
2 Likes
Thanks, can you tell me what model it is?
I used the Flipsky 65161 with 15 cm props. Enough power to get up and going.
Can you tell me which model servo you used for steering?