Sure, I’m building a speed setup to try to see how fast an efoil can be pushed. For this kind of application I see a point as you have to use kite race foil which are pretty unstable especially without the relief from the harness.
You simply can not compare DJI, a company that sells photography equipment (yes, that’s what it is and why its so popular) to any form of water sports product. In every aspect they are completely different.
Even if you were to make an efoil board so simple you could take off and ride on one leg, there would never be a mass adoption of the sport. Here’s why:
- Government would legislate the crap out of it. It’s already illegal to ride in places even with very few riders. Just look at the e-skate and e-scooter laws popping up everywhere in Europe.
- Every person that buys one will need a way to transport it. It’s way more cumbersome than and eskate or escooter…
- Kiteboarding, surfing, kayaking etc are hugely adopted worldwide and are still more expensive to do than buying a basic DJI drone…
- Not even China can produce any components cheap enough to make efoils cheap enough for mass adoption. There’s simply too much human time involved in the manufacture of the components!
I could go on and on but there’s not much point…
As Manu says, there may be some niche areas where this would be handy, but don’t expect mass adoption.
What extreme sports do you do? I would guess that the skills learnt there might not be easily transferable to foiling.
I think you should open an extra thread for the building process.
And this one can be the thread for discussing if it is necessary or not.
I am looking forward to your finished remote 
1 Like
Short video of the remote in action. The magnet has been hold steady to dual hal sensors.
I am reorganizing the firmware for both to make it configurable. Plus Adding Secure Bonding so once they pair. They will not pair any other device unless user holds the receiver button for 10 second to delete bonding information
17 Likes
Really cool  congrats
congrats
That is fantastic, I have been thinking of doing an electronically stabilized sailing hydrofoil as well. I am really at the beginning stages of the design.
- Did you guys build this as a commercial design or as a personal project ?
- How much of the project did you guys design and build, and how much was purchased from Splashelec ?
Evan
Hello @emccarthy,
It’s a big puzzle with many different people involved:
DESIGNER
C-SYSTEM - Christian Favre
–
DESIGN FOILS
Martin Fischer
–
CALCUL STRUCTURE
PURE Design & Engineering / Giovanni Belgrano - ETNZ
–
NUMERICAL HYDRODYNAMICS
Hydrocéan
_
ELECTRONIC STABILISATION
Splashelec
You can find more info @ http://v2-factory.com/
Do you have some info on your project? I am curious
Best
1 Like
sorry guys development been pretty slow for last month. I have been busy with designing battery pack

I worked on:
1-make the remote to bond just to specific receiver for now it is hard coded but will add serial command to add receiver address in to remote
2- smooth throttle and hal reading filtering and redundancy check with second hal
3- kill switch at receiver side
4 and bunch of minor improvements
But I am planning to finish it up the below list by end of this month:
1- new display layouts switchable with cruise button short press
2- gps assisted cruise in combination with vesc cruise mode
3- new receiver fw branch to support any esc with 200amp 16s pixhawk Voltage current module
5 Likes
Are you 3d printing the enclosure or cnc?
Housing will be Aluminum for better cooling of the cells to get higher deliverable discharge performance. I am also working on custom generic smart bms also

2 Likes
What technical data will the BMS have?
Balancer current, discharge current, etc.
It will support up to 150 amps continues charge discharge, up to 15s, and all common protections Plus water leak detection.
It has usb, rs485 and CAN for communication.
All the parameters will be configurable for the pack configuration . Here supposed to be dedicated for remote but kinda became very noisy and it is my fault l. I will open another thread for the pack and bms soon when I get tue first protos
3 Likes
Wow! Keep up the great work. I’m impressed!
1 Like
Big job man the remote and now the esc !!your work is awesome for the comunity  with peter who produce a great motor the best hardware is going to imerge from the forum and not the chinese thinkthank
with peter who produce a great motor the best hardware is going to imerge from the forum and not the chinese thinkthank
3 Likes
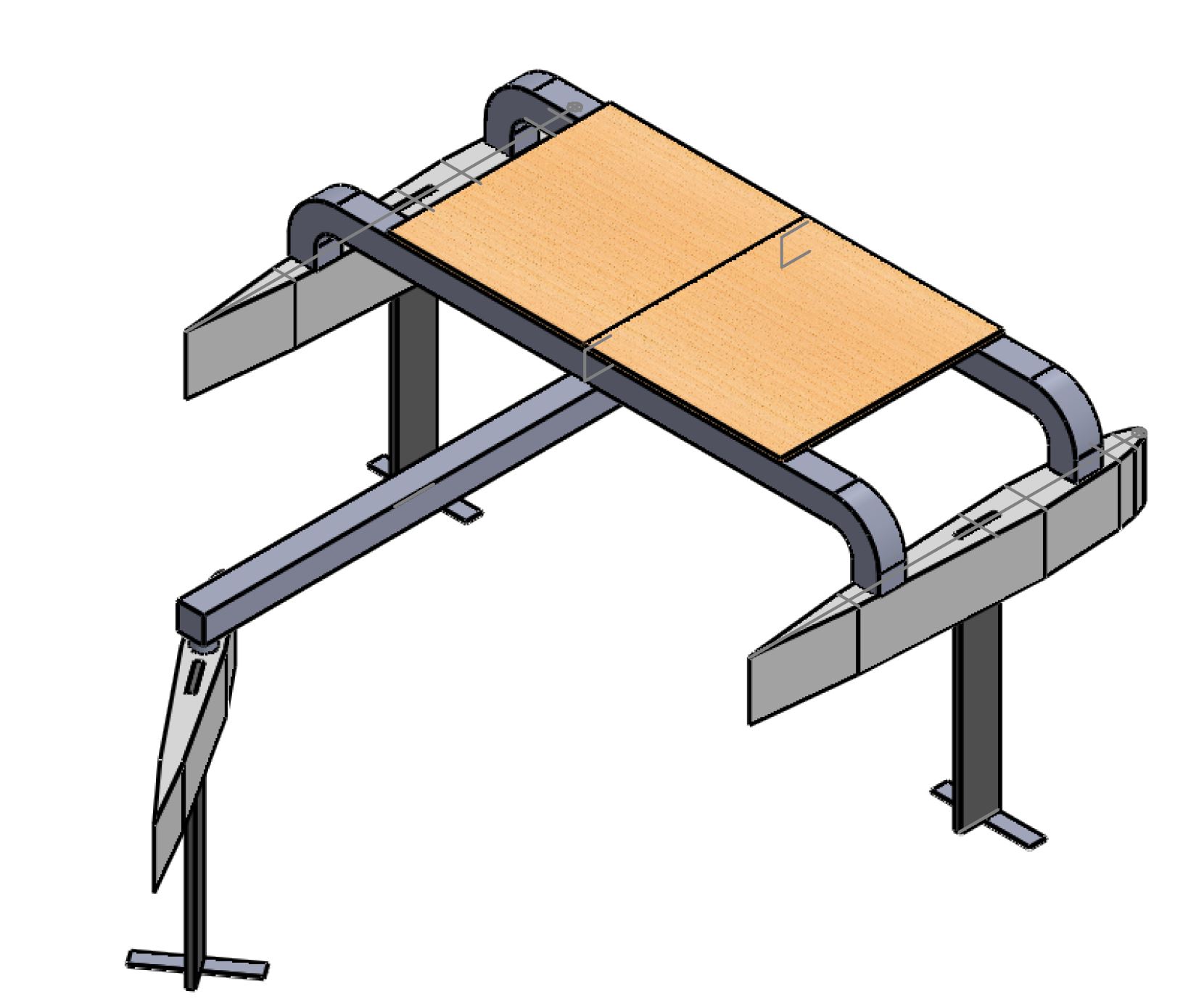
This may be a bit off topic but I am not sure where else to put it. Here is a drawing of an idea for a foiling catamaran/ trimaran. I also included a link to a spreadsheet that calculates the forces for foiling on the foils given inputs on the boat dimensions, wind and speeds. For the hydrofoil I was considering fully actively controlled foils so that structurally it acts like a tripod. I chose all airfoil shapes so that I could roughly calculate the lift and drag for all the components that could be in the water. I do not know where to look for design considerations for a planning hull, or the pointy shaped pontoons of racing catamarans. If anyone cares to look at the spreadsheet calculations, i’d love to get feedback.
Foiling calculation spreadsheet: Link
It is really interesting to look at the forces on the foils depending on the angle of attack of the sail (wing) and the speed of the boat in the water. For a given wind and some simplified foils it seems that you can get foiling speeds up to ~ 2X the wind when it is coming from 90 degrees, but it seems really hard to get out of the water with much less than 10 mph wind. Perhaps you could stretch things if you gained speed with almost no angle of attack on the foils, and then use momentum to launch out of the water. It seems that the induced drag on the foils dominates just before liftoff and keeps the boat from foiling.
I am now really impressed that people are building boats that can do up to 3X the wind speed.
Are you going to use a kite for propulsion?
No I just hadn’t drawn the Wing.
Just wanted to share with you guys the latest status. I know it is going slow, due to family stuff and doing multiple projects single candidly.
Please excuse the ugly black residue on top surface. I printed the cover part with flexible resin but that freaking resin not rubbery at all and had almost no travel so I had to rip it. I am thinking to print a mold and cast that part in silicon.
To arm/disarm the remote you have to hold left and middle button.
Left button hold for on/off
Write button is Cruise lock
and middle button is Cruise mode
In the video you see two different modes of operation, first manual mode and then cruise mode and locking cruise mode with right button press. Cruise throttle start to increase half way close to sensors and vise versa. at any time you can lock/unlock it with right button or get out of cruise b pressing middle button. Cruise throttle needs fine tuning and I need to add safety logic to not start after Arming until throttle moves to 0%. Also I am working on adding fall detection with IMU chip to the remote and receiver. Receiver also supports fail-safe switch (leash and magnet switch)
I was not able to upload the log file here but below is the snippet of the whole file. Sorry I had to delete coordinates , in case if you are in bay are and need to stop by for great espresso just pm me for the address 
these ==========9681========= numbers are time tags in ms as you can see they are not real time. The reason is nrf52840 is a single core MCU and Bluetooth always has the higher priority over of all the tasks.
I see worst case of 25ms of logging data which I find it it good enough. Thinking of a software to properly show these data and statistics in nice gui with map 
I need to add some more data field to the log like IMU’s tilt, yaw and roll, remote modes…
Currently I am working on the mechanical design of the body with help of a mechanical engineer friend this is a blocker for the project since I need to have the design to do another pcb spin. Please feel free to commend on any aspect of a project, gui, functions or new features. It will be easy to do changes at this point.
==========9681=========
RC State: RC_CONNECTED
SYS State: SYS_REMOTE
BLE RSSI:
Raw: 0 Percent: 0
RemoteBatt:
Raw:3.916659 Percent:43
GPS:
Fix:2 FixMode:3 Sat_in_view:12 Sat_in_use:12 Hdop:0.970000 Pdop:1.820000 Vdop:1.540000 MagVar:0.000000
lat:-0.00000 Long:0.00000 Alt:18.500000 Speed:0.413000 GroundCourse:0.000000
UserInputs:
Hal1_v:1.747165 Hal1_percent:47.164840 Hal2_v:1.721834 Hal2_percent:19.848690 BtnCrouse:1 BtnPlus:1 BtnMinus:0
VESC:
Temp:26.700000 FaultCode:FAULT_CODE_NONE,Vbat:31.000000 CurrIn:1.820000 CurrMotor:3.520000, Ah:0.035900 Wh:1.113800 Duty:61.699996 RPM:3763.000000 Tacho:46610 Tacho_abs:60468
==========9691=========
RC State: RC_CONNECTED
SYS State: SYS_REMOTE
BLE RSSI:
Raw: 0 Percent: 0
RemoteBatt:
Raw:3.913611 Percent:42
GPS:
Fix:2 FixMode:3 Sat_in_view:12 Sat_in_use:12 Hdop:0.970000 Pdop:1.820000 Vdop:1.540000 MagVar:0.000000
lat:-0.00000 Long:0.00000 Alt:18.500000 Speed:0.413000 GroundCourse:0.000000
UserInputs:
Hal1_v:1.747303 Hal1_percent:47.303005 Hal2_v:1.722763 Hal2_percent:20.693559 BtnCrouse:1 BtnPlus:1 BtnMinus:0
VESC:
Temp:26.600000 FaultCode:FAULT_CODE_NONE,Vbat:30.899999 CurrIn:2.340000 CurrMotor:3.620000, Ah:0.036000 Wh:1.114700 Duty:77.500000 RPM:4907.000000 Tacho:46641 Tacho_abs:60499
==========9702=========
RC State: RC_CONNECTED
SYS State: SYS_REMOTE
BLE RSSI:
Raw: 0 Percent: 0
RemoteBatt:
Raw:3.914650 Percent:42
GPS:
Fix:2 FixMode:3 Sat_in_view:12 Sat_in_use:12 Hdop:0.970000 Pdop:1.820000 Vdop:1.540000 MagVar:0.000000
lat:-0.00000 Long:0.00000 Alt:18.500000 Speed:0.413000 GroundCourse:0.000000
UserInputs:
Hal1_v:1.743422 Hal1_percent:43.422264 Hal2_v:1.720276 Hal2_percent:18.433025 BtnCrouse:1 BtnPlus:1 BtnMinus:0
VESC:
Temp:26.600000 FaultCode:FAULT_CODE_NONE,Vbat:30.899999 CurrIn:2.340000 CurrMotor:3.620000, Ah:0.036000 Wh:1.114700 Duty:77.500000 RPM:4907.000000 Tacho:46641 Tacho_abs:60499
==========9723=========
RC State: RC_CONNECTED
SYS State: SYS_REMOTE
BLE RSSI:
Raw: 0 Percent: 0
RemoteBatt:
Raw:3.913879 Percent:42
GPS:
Fix:2 FixMode:3 Sat_in_view:12 Sat_in_use:12 Hdop:0.970000 Pdop:1.820000 Vdop:1.540000 MagVar:0.000000
lat:0.00000 Long:0.00000 Alt:18.500000 Speed:0.413000 GroundCourse:0.000000
Hal1_v:1.738210 Hal1_percent:38.210308 Hal2_v:1.715856 Hal2_percent:14.414152 BtnCrouse:1 BtnPlus:1 BtnMinus:0
VESC:
Temp:26.600000 FaultCode:FAULT_CODE_NONE,Vbat:30.899999 CurrIn:2.340000 CurrMotor:3.620000, Ah:0.036000 Wh:1.114700 Duty:77.500000 RPM:4907.000000 Tacho:46641 Tacho_abs:60499
==========9739=========
10 Likes
Great work 
Really like the kill switch on the receiver
1 Like
Thats really necessary, imu to detrct fall or tilt limt, radio link or rssi will not act as fast as direct gpio interrupt and that means you lose fingers or not like that french guys that were mentioned in safety thread