Hello, this will be a very slow build due to time constraints, but I have made enough progress to start sharing and to ask advice…
So, this is a large jetboard for cruising out the back on the larger waves which aren’t breaking. It’s a big, buoyant aircraft carrier. I weigh 100kg and the total buoancy is 175kg. The board should weigh around 30kg. The important bits are;
2 x MHZ 58 jet units
2 x Scorpion HK-5035/760KV
2 x MakerX 300A VESCs
2 x 10S 12P battery packs
I am running dual systems as everything just gets too big (cables, VESCs, etc) with a single drive. As well, I like the reliability of two completely independent (almost) systems.
I will be running water cooling for the Scorpions and potentially for the battery packs.
I have just completed a test build of the electronics so that I can develop the sofwtare to run two systems from a single remote.
I have successfully run the VESC motor configuration tool on both motors and VESCs. The issue I have is that when I throttle up slowly, they run smoothly. If I throttle quickly, they vibrate badly as they ramp up. See video here;
Notice one of the VESCs goes into a fault mode.
Has anyone else faced this issue? I would imagine I now have to do some fine tuning in the motor configuration to smooth out the ramp up.
So, first battery coming together - only test leads on the main output at this stage. 10S10P with Molicell 42p. This should give me 42Ah and easily 300 amps. The internal resistance is claimed to be less than 15 mohms so, .15 ohms per strand @ 30 amps should generate less than 50W of heat at full power?
I am still debating whether I watercool the battery, but it appears that almost no one on the forum is doing that, so maybe I save myself a whole lot of complexity and hassle.
I have just seen the conversation about long battery leads destroying ESCs! Whoops! Current design is to have the batteries at the front of the board. I’ll probably lengthen the motor leads and move the VESCs closer to the batteries.
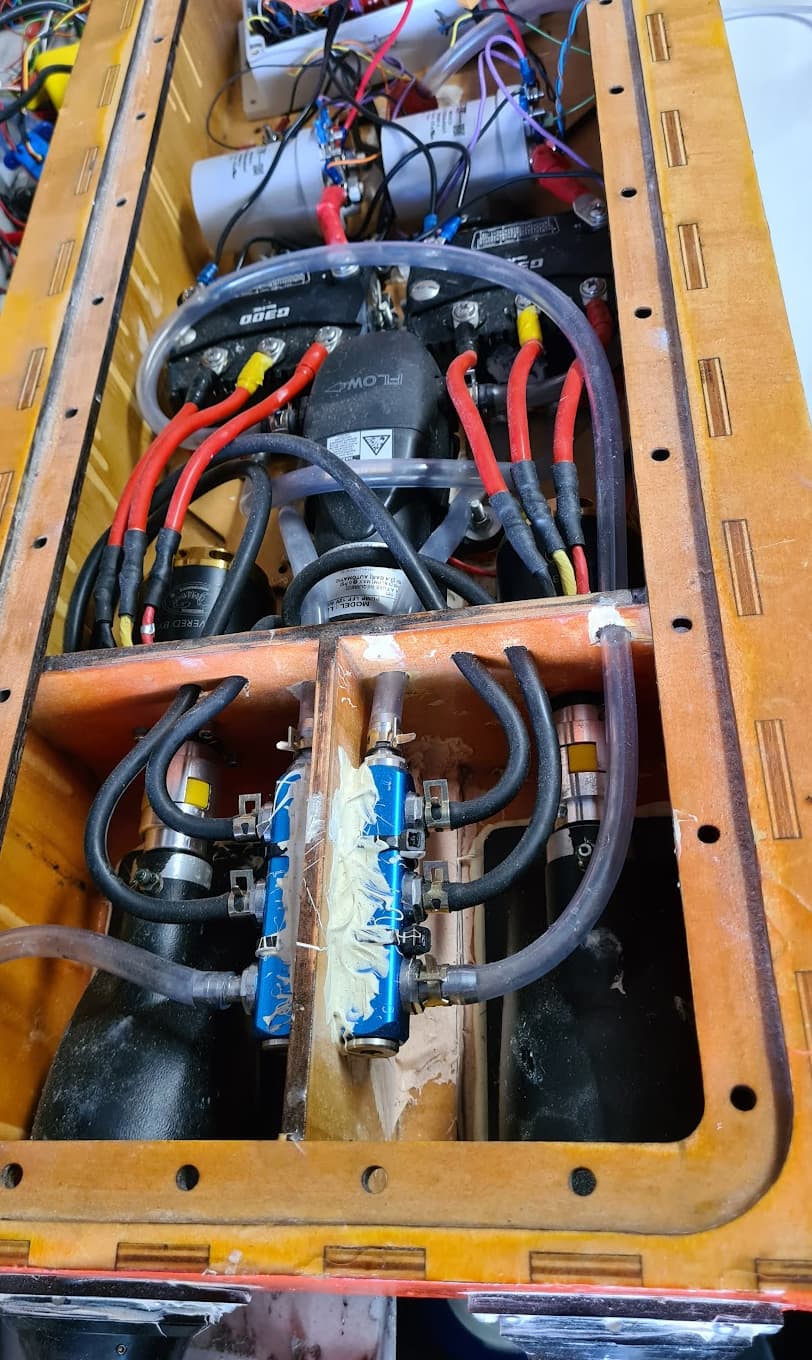
Major milestone! Have fitted the two MHZ Jet58s. Next step is to wait until the sealant cures and then put the propiulsion box in the pool to make sure it doesn’t leak.
SO, I said it was going to be a slow build, but progress has been made.
The motor / jet / electronics box is now fully complete and tested. It took a while to have the cooling system de-leaked, but it is dry now. ESCs and motors are water cooled.
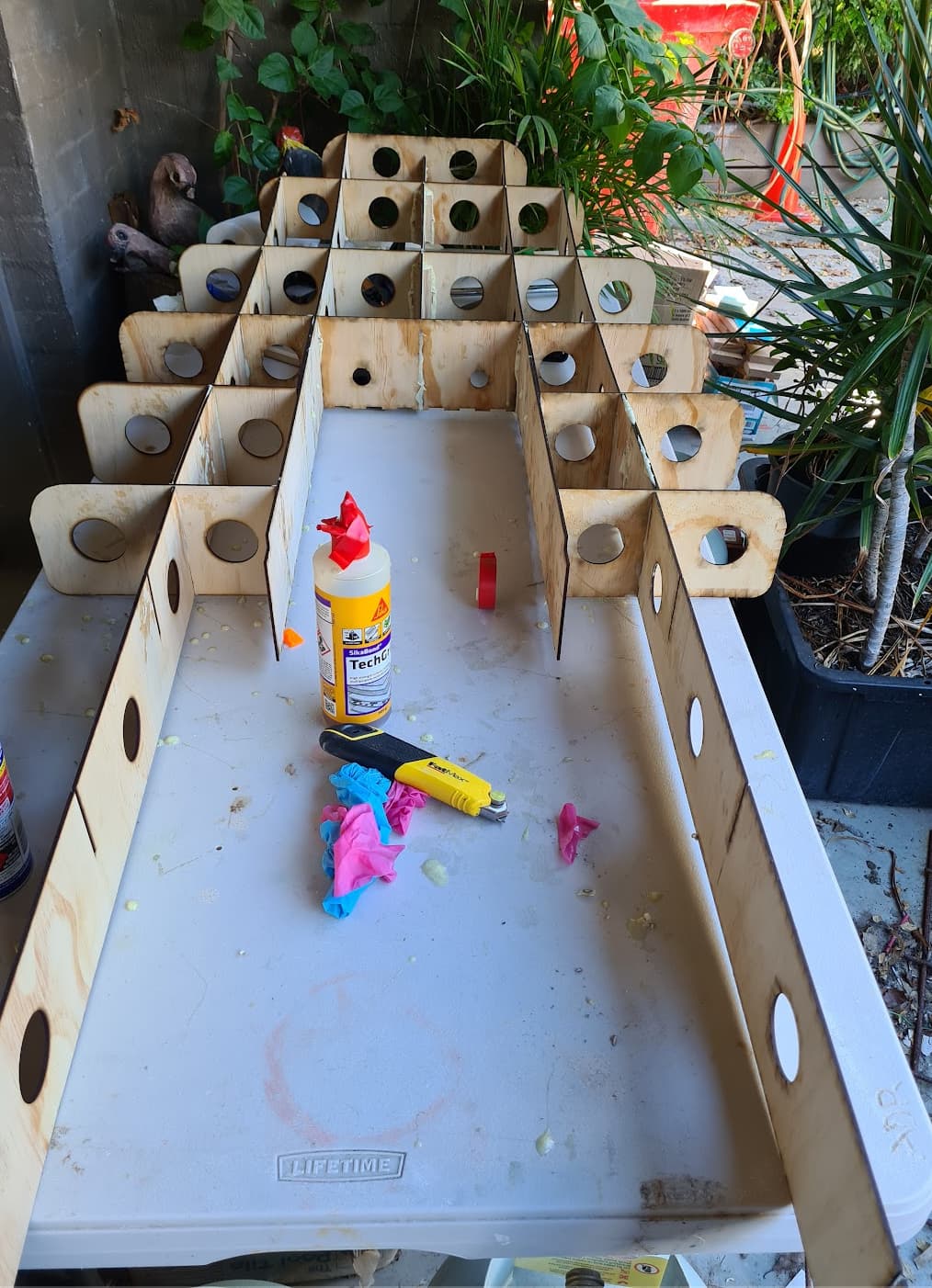
The plan for the board is to build a plywood frame and then cover it with masking tape and then fill it with two part expanding foam. This should expand past the frame so that I can then sand it all back and cover it with epoxy. The board is heavy, but I should have plenty of power - about 45kg of thrust.
Cutting each block is painful, but the result is incredibly stiff and strong. No idea how I will cut the board to shape at this stage.
The red insert is the cooling water intake, the long black slot is for the fin.
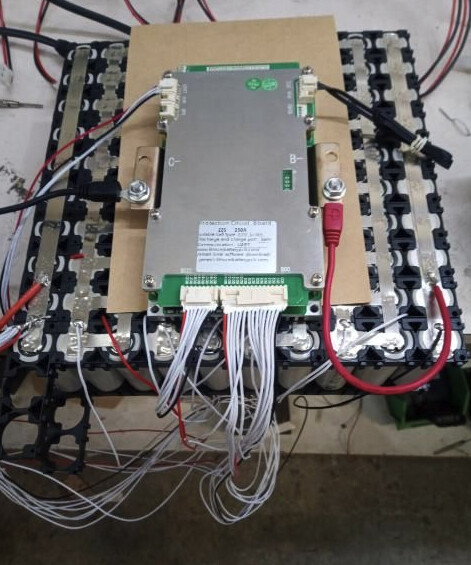
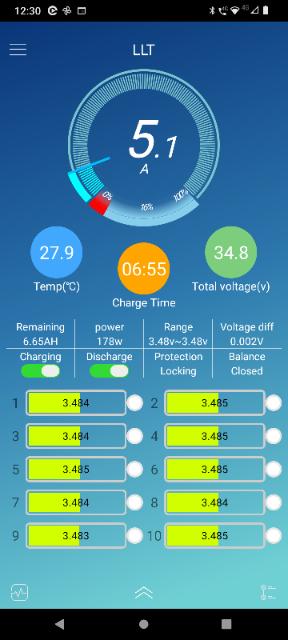
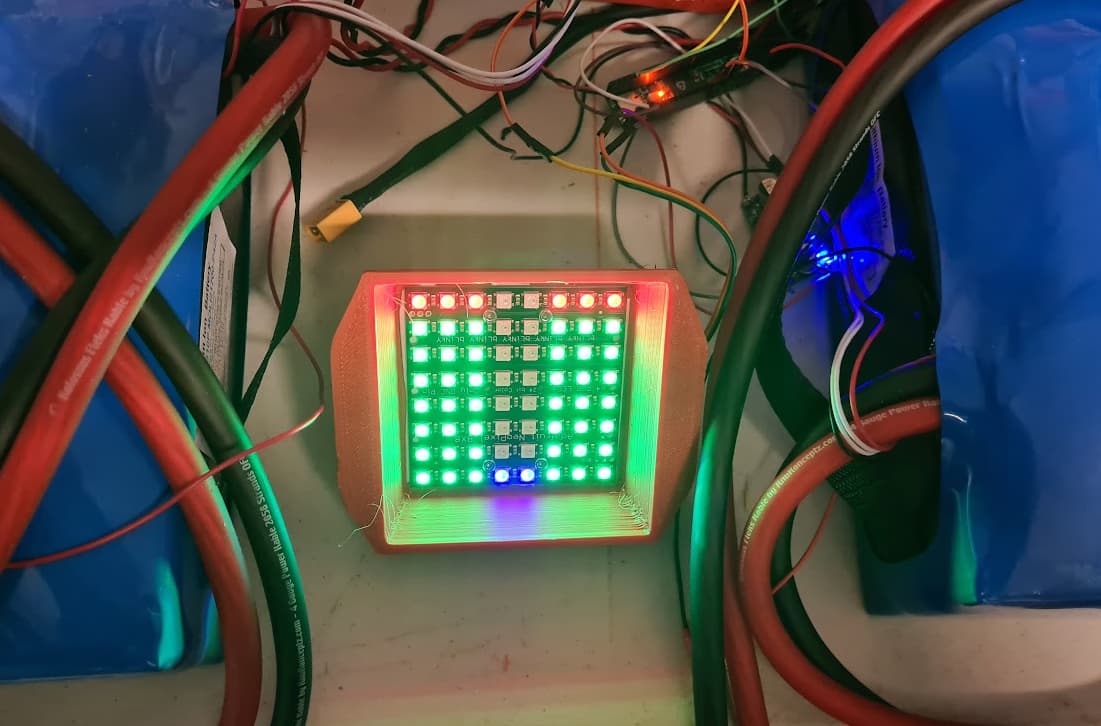
Here is my attempt at a daylight readable battery monitor showing capacity and temperature. This will be set into the deck under perspex so that it can be read easily. BMSs are communicating via a Teensy.
Deck is glassed. I tried to be smart with some translucent pigment, but it is too see through. I’ll have to use an opaque top coat, but at lest the glass is down.