Thank you for the info.
The motor has 6 poles, and is set to this in the VESC tool.
Tomorrow I will use a RPM meter and check again with this.
How many amps are you drawing? What’s the max amps set at for the battery? What are max amps for the motor?
1 Like
6 poles : rpm = erpm / 3 ( pairs )
So I guess you are around 4900rpm which is supposed to be 12s x 100kv
1 Like
that is ERPM you see in your VESC which you need to divide with # motors pole pairs. 12s and 100kv that looks like right ERPM. With 14s 100kv I reach to 12.5k ERPM on fully charged battery 58V
ERPM=58Vx100kvx3=17400, Probably motto is not 100kv and they are slightly lower kv. People see the same drift from real test versus math in 120kc also. Plus the losses in motor and voltage drop over wires.
Either efficiency of these motors are between 70 to 80% or nominal kv is lower than what they clam.
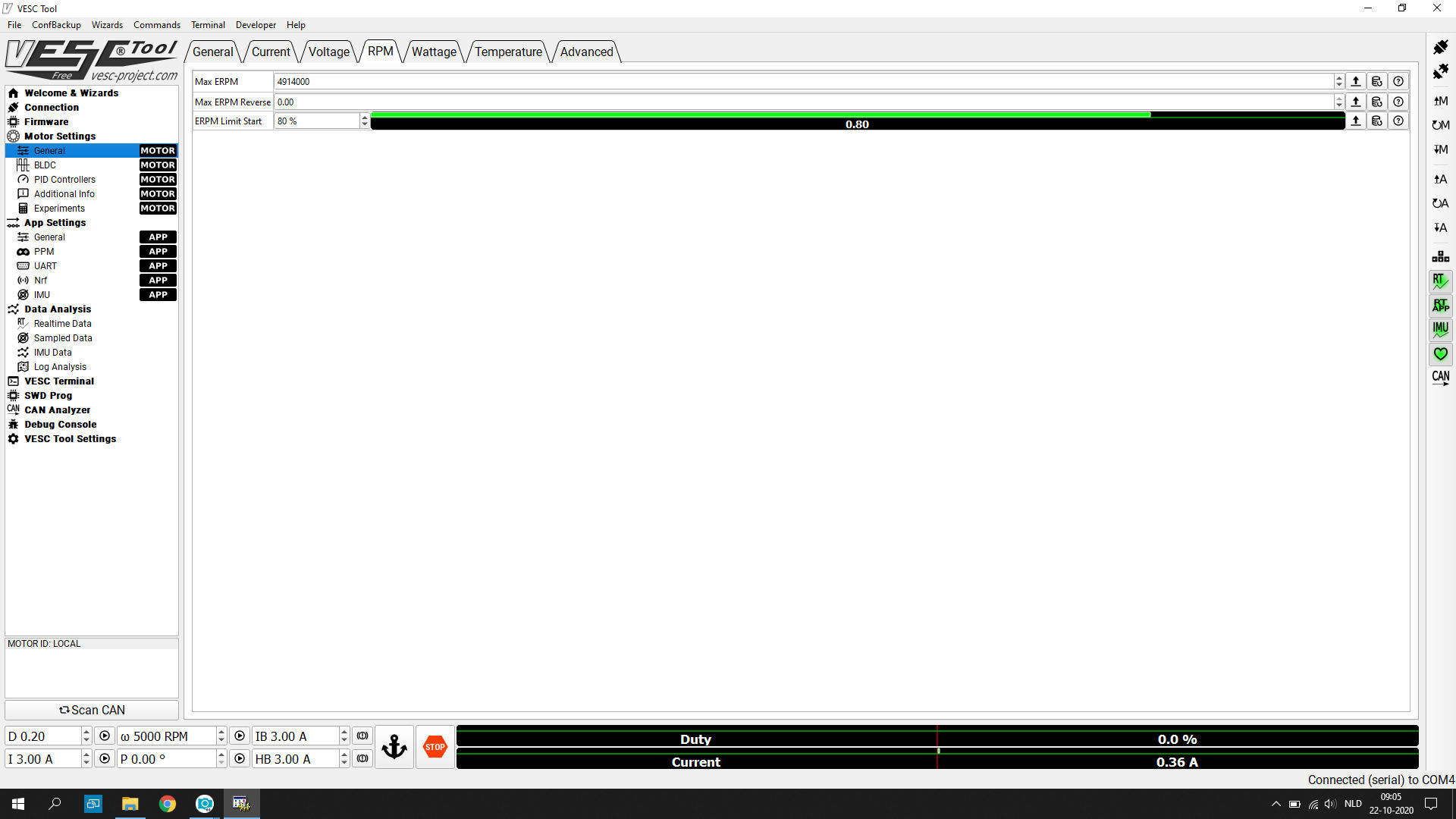
There is also current limiting for both battery and motor current which can damp the rpm. Make sure max ERPM setting is high enough. I see same ERPM around 10k when my pack reaches around 48V fully charges 12s pack.
1 Like
Okay. We did some testing with a tachometer.
According to the gauge the motor does 4050 RPM at WOT.
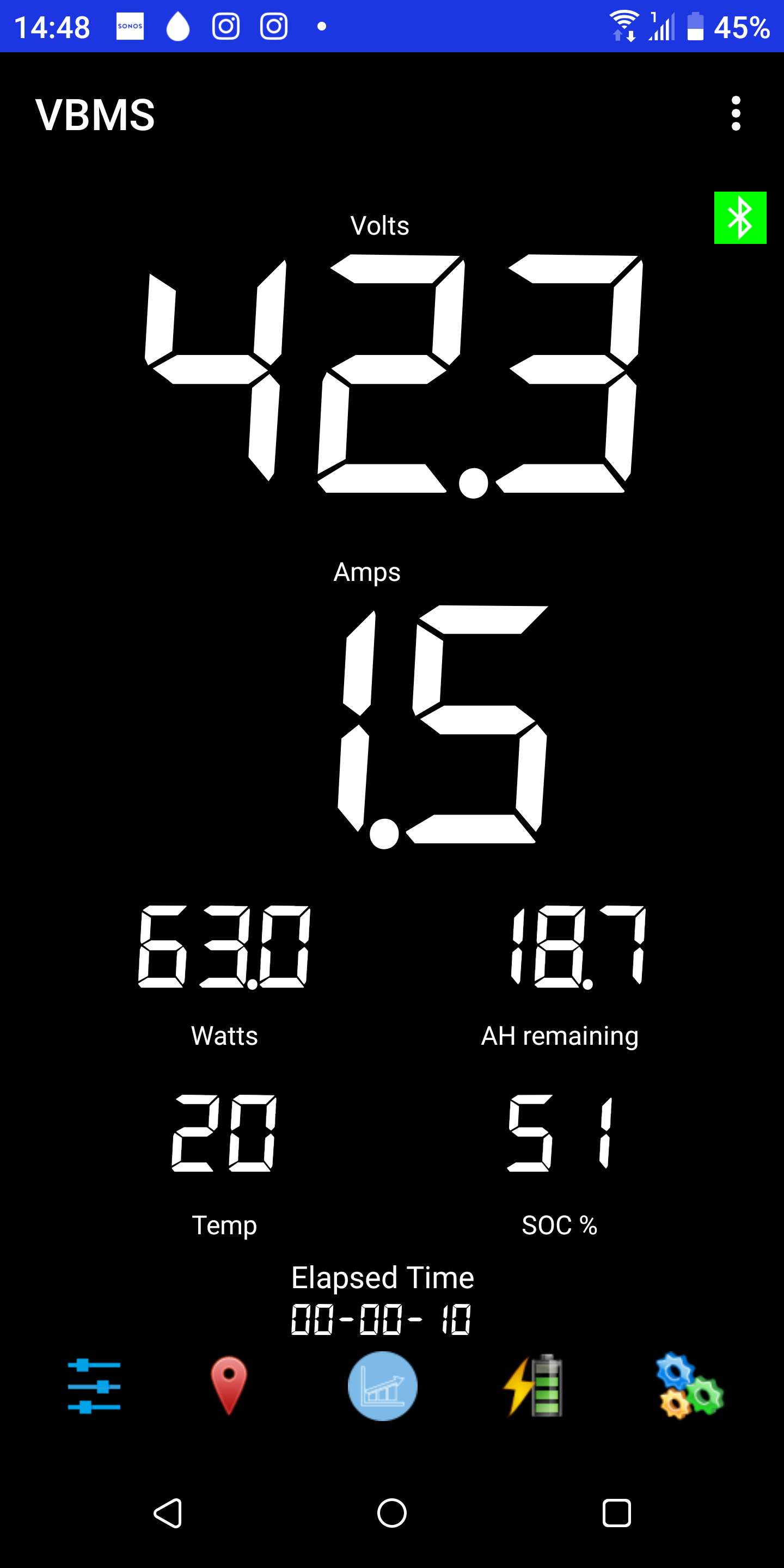
Amps used (according to BMS) is 1.5 Amps (no load on motor!)
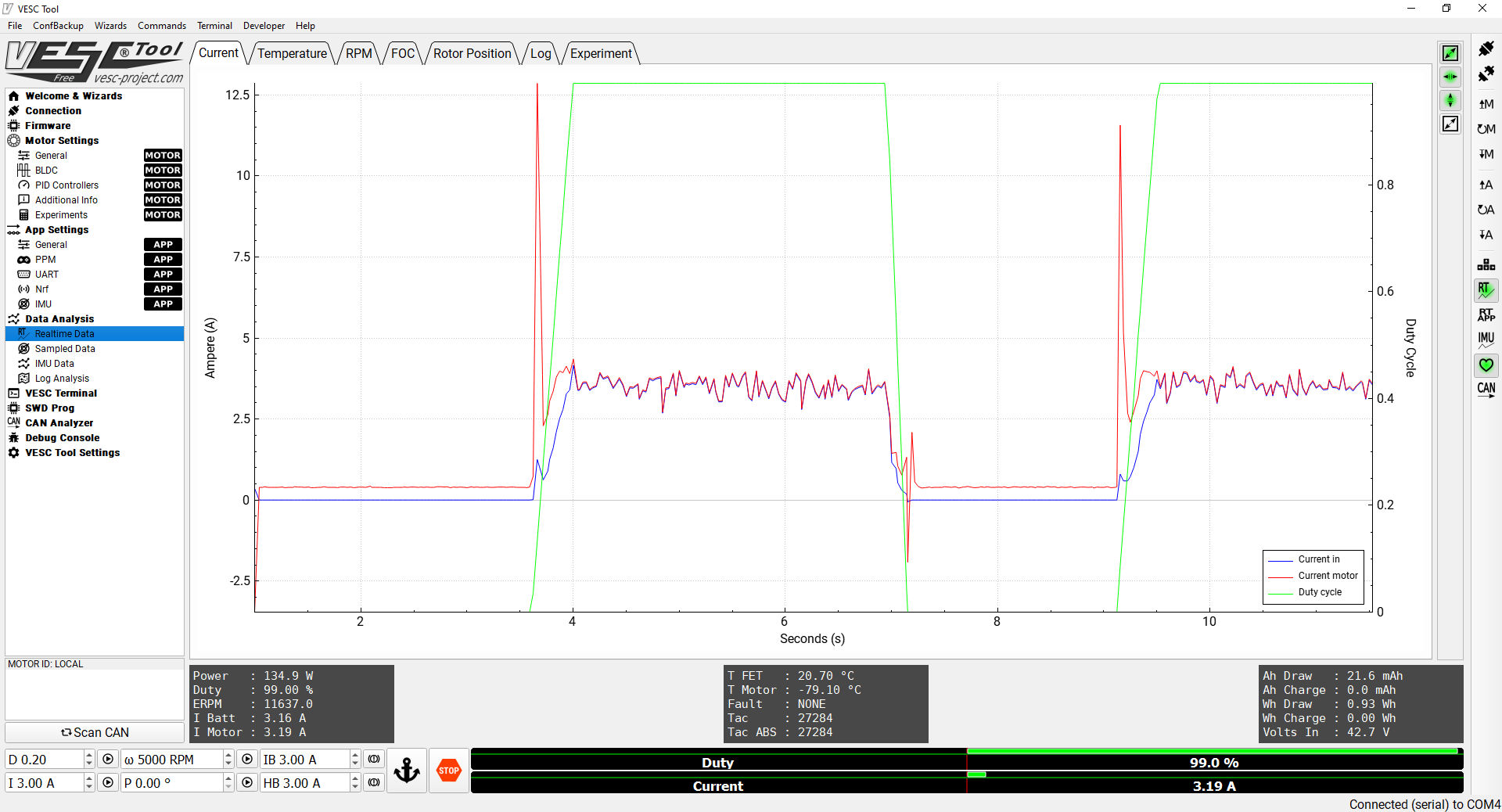
Amps used according to VESC is 3.1 Amps (no load on motor!)
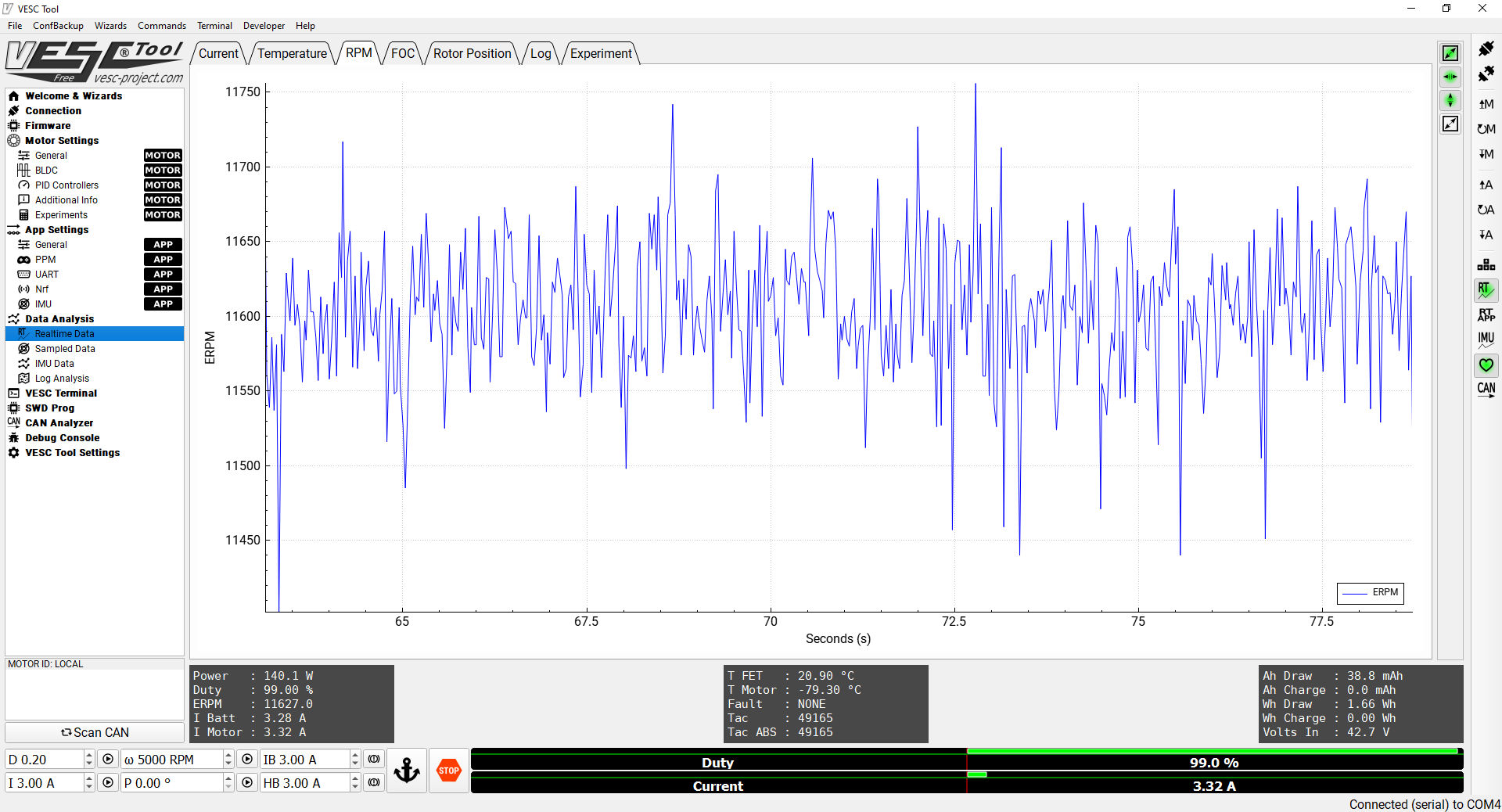
ERPM (again no load on motor) is 11627. I have no clue why I got 9800 yesterday.
So according to Alexandre his post above
RPM = ERPM divided by 3.
11627 / 3 = 3875,7
That is pretty close to what I measured with the tachometer (4050)
Now we have to find why the amps and watts values are out so much between the BMS and VESC tool.
[BMS reading]
[VESC Current]
[VESC RPM]
This is actually quite a big issue. If the VESC is under-measuring the ERPM, then everyone using the Metr app thinks their setup is performing better and more efficiently than it actually is and explains quite a few things I’ve seen in the graphs posted here.
I have a Metr setup here, but have never bothered using it to collect data. I think it’s time I swapped out my speed controller and tried out the Metr app to see how the data compares to the other ESC’s and data loggers I have here.
1 Like
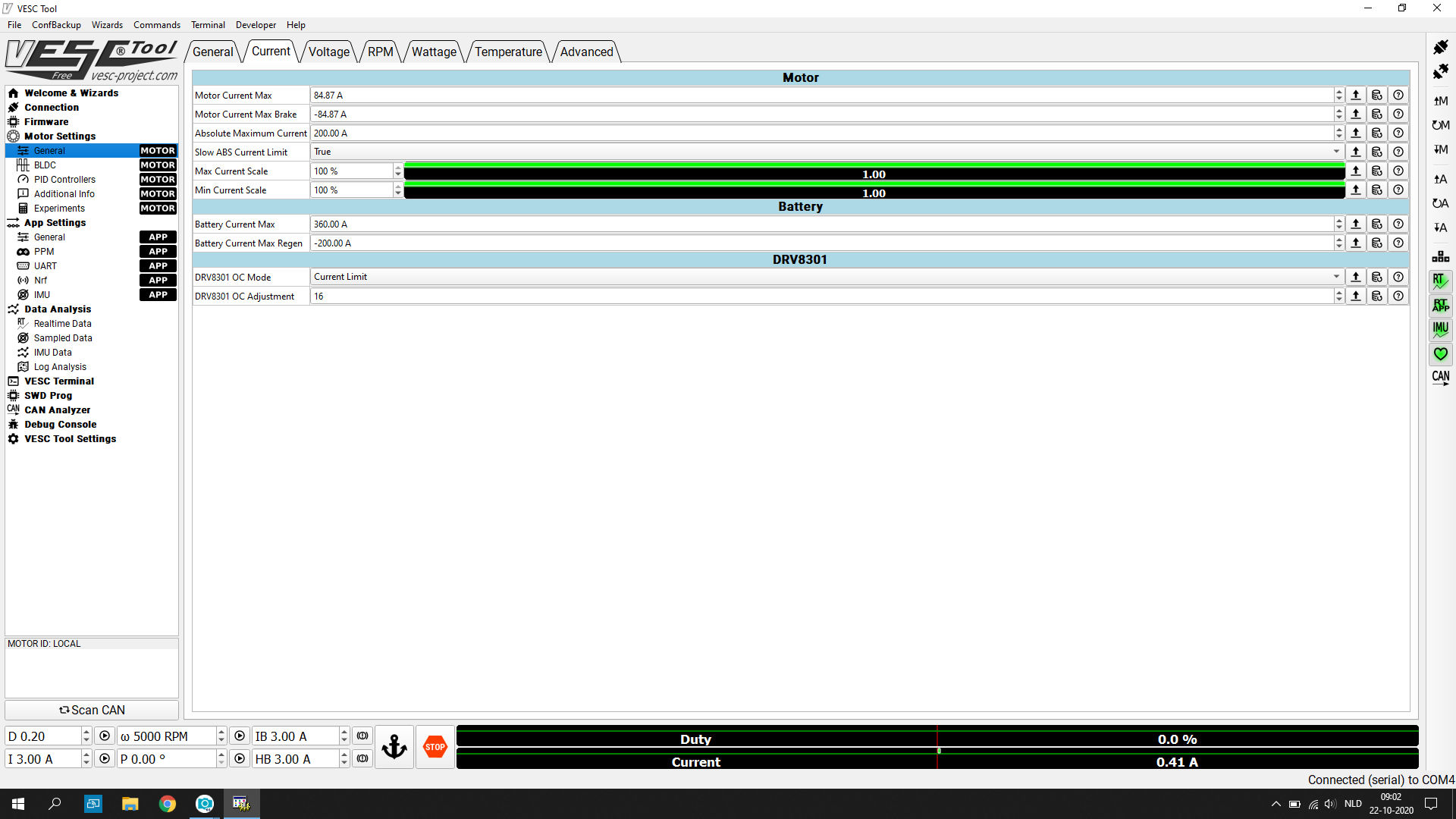
something is not right, your motor current and battery current is very close to each other. usually battery current is something like half of motor current. This might be because there is no load or MOTOR FOC wizard didn’t set proper values for the motor.
Also what BMS is that? it is a nice app for BMS
2 Likes
This could be so true. I only started using this yesterday!
Please let me know what info you need from VESC tools and I make a screenshot of it!
BMS is a Ant BMS. Software is from Vortecks and is called VBMS
@Jezza . I’m new to this. It could be something I am doing wrong here!
Rpm with in 5% , may be due to measuring tool …
Vesc got amp motor? , and bms is battery amp …
Data is of load as I understand , so look ok to me
Motor amp max on load is always than battery ( even compared to calculated value included duty )
Read fast but looks fine to me
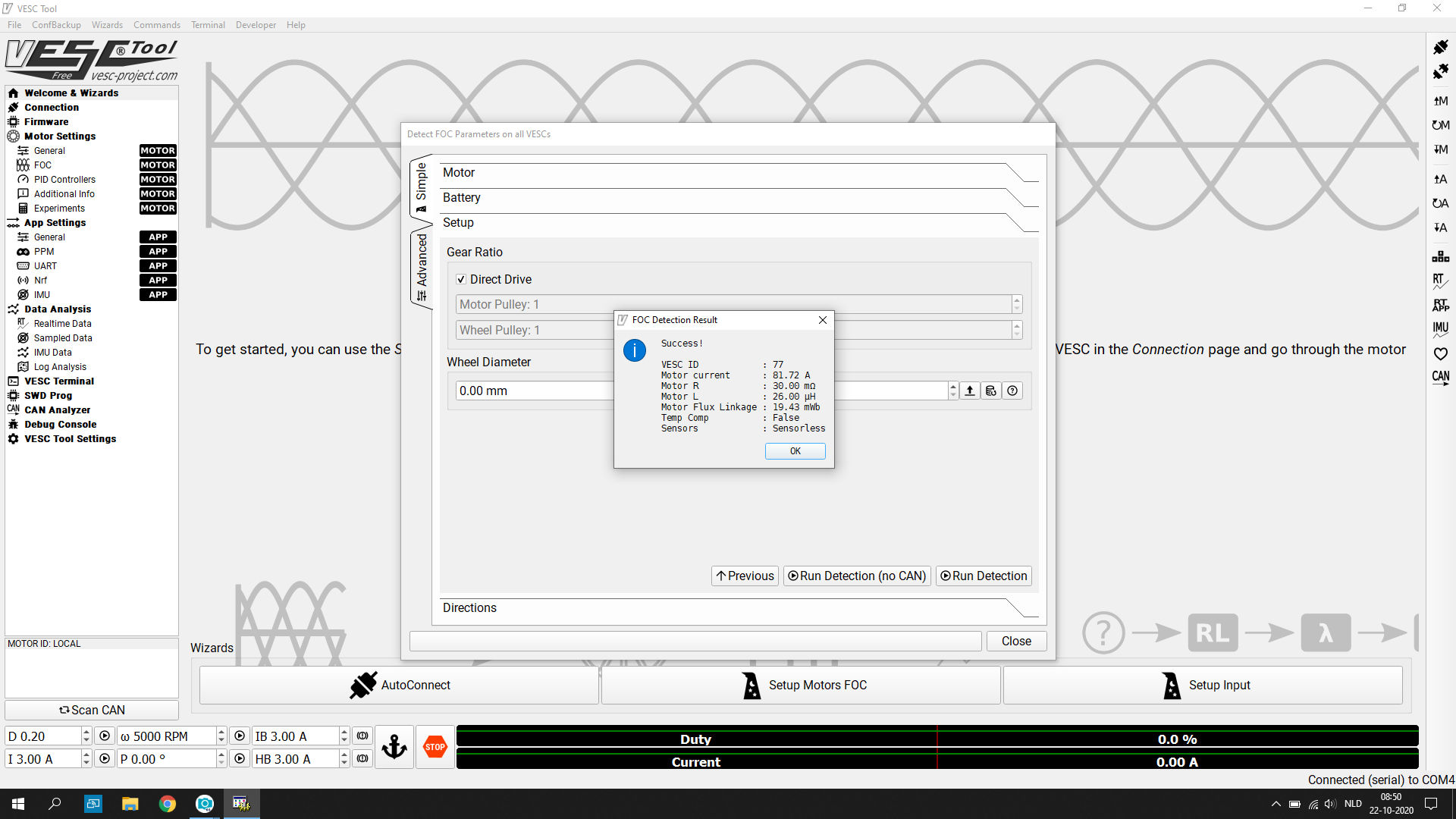
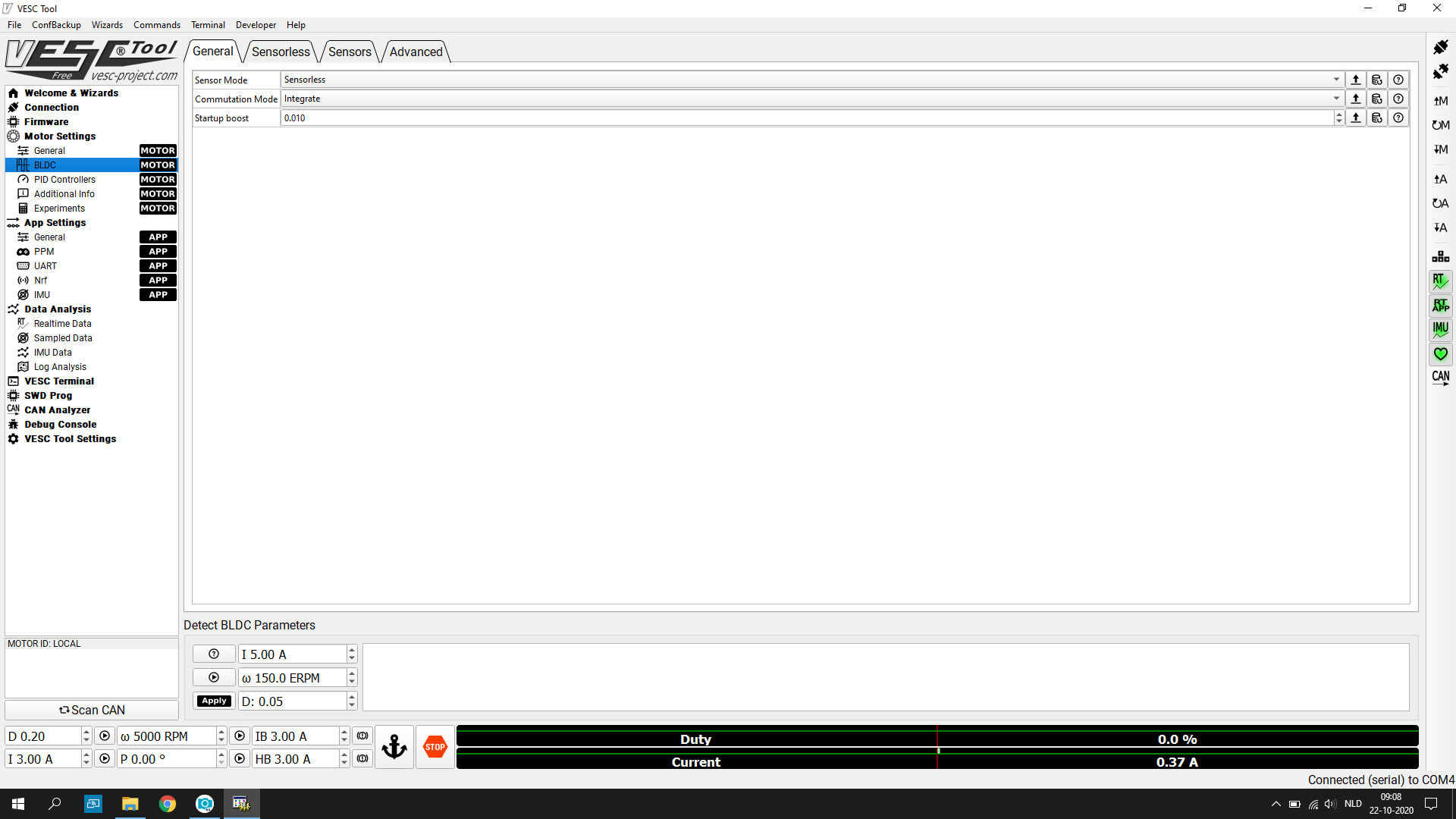
Édit : well can you post a screen shot of your motor detection values … Or run detection again couple times
Things don’t really add up : 148w , 3,28A , 100kv , 11627 erpm , bms voltage …
I found different erpm value at different switching frequency during my tests on foc
1 Like
Alexandre. Thank you for helping.
Please note that the above tests have been done with no load on the motor.
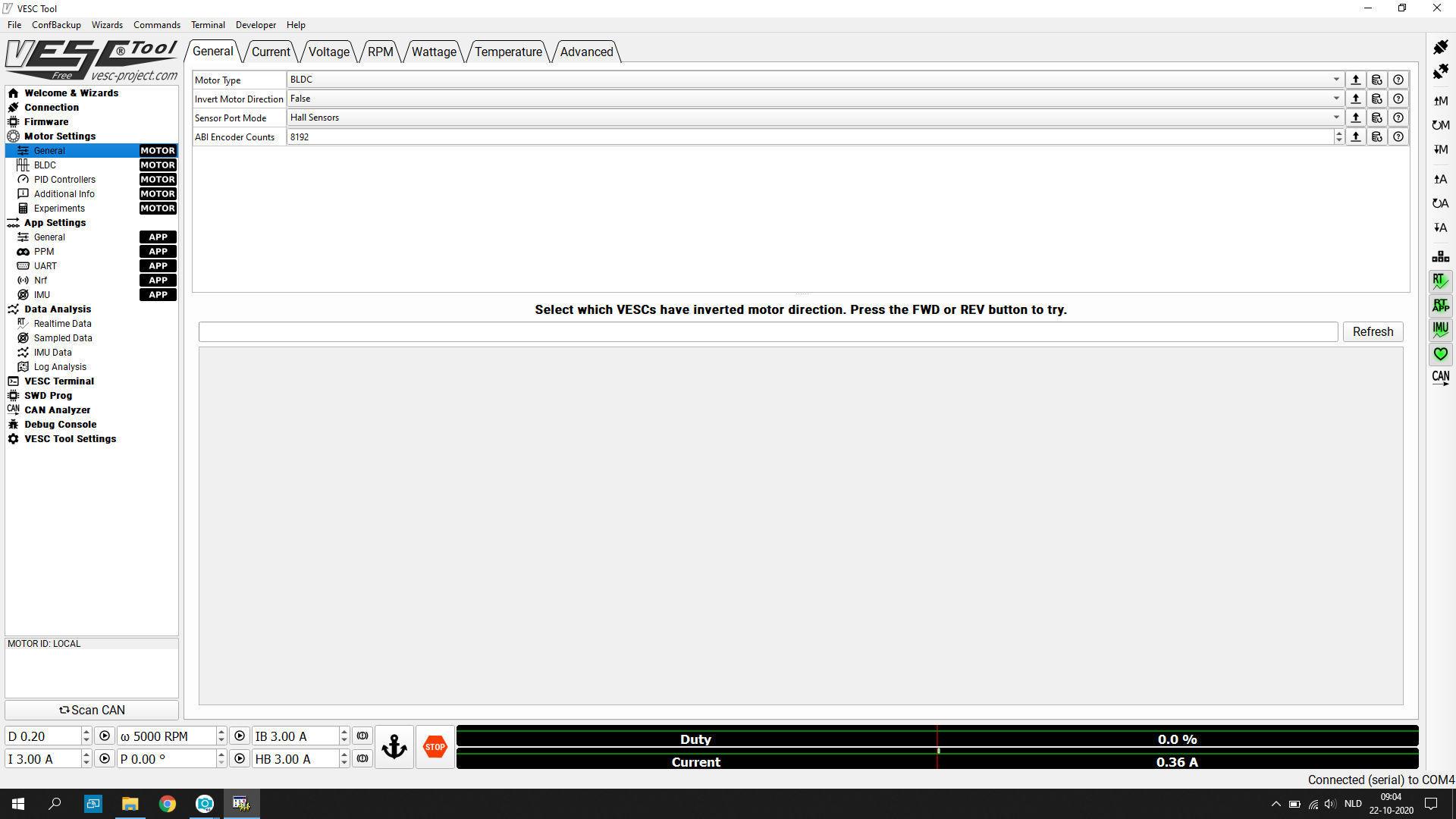
My dry setup here:
Motor used: Flipsky 65161 100KV
ESC: Flipsky FSESC75200 (water cooled version)
Battery: 12S12P (not fully charged!) 50.4 Volt full, 43.2 volt nominal, 36Ah, 5C-180 Amp | 10C-360 Amp
Again. I am totally new to this VESC stuff. So it is probably an ID 10 T error.
Click images to enlarge.
2 Likes
Resistance looks ok
Under motor type : switch from bldc to foc
Other settings ( but that is only me …)
Motor max : 120A
Motor min : -20A
Battery max : 100A
Min : -20A
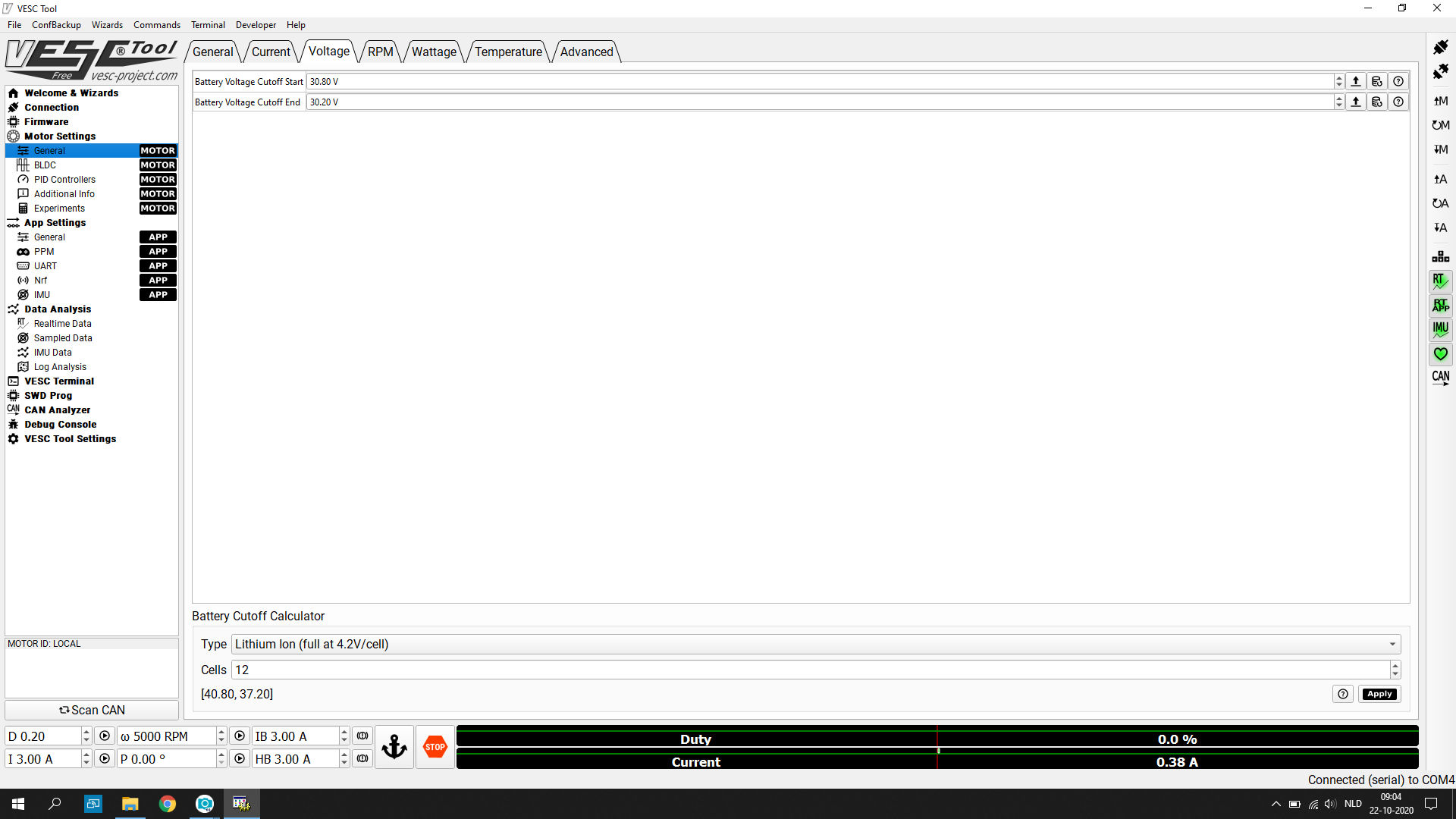
Battery voltage cut off : 38v
Maybe max duty 95 instead off 99% ( ?)
And always : write , upload , save , download and check
Thank you @Alexandre
I have applied your settings, and everything is still working 
My dad and I are going to setup a testing bench with water cooling and a disk brake on the motor.
This way we hope to get some true values.
OK. I double checked my setup (65152 with 60/200 VESC, 12S) out of the water yesterday and everything that you have done looks good to me. All the numbers look good and pretty close to mine. When you switched to FOC what did you experience? With my setup the motor does not run as smooth.
Unfortunately, I now have my own VESC problem. I had been working on a 10S setup and suddenly I have a new problem…lack of power. Obviously, there is a power loss from 12S to 10S but I had a ton of extra power at 12S. When I would get on my board I would punch the throttle to 100% and let the board accelerate. Within 10 seconds, the board would start to “lighten up” and begin to come out of the water. I would then let off the throttle to about 50% and I would be flying.
I figured It must have been the 12S to 10S but when I went back to 12S, I still wasn’t able to get the board to “lighten up”. I assume I made some change in the VESC programming and now I’m stuck. I’m going to do some testing in the water today but I’m frustrated. Especially knowing my season is about to end.
My frustration (and apparently yours as well) is the lack of collective knowledge on this subject. Both these motors and VESCs have been used numerous times yet we still seem to have a significant knowledge gap in this area. The biggest issue that I have with programming these VESC’s is the repeatability aspect. That’s why I started this thread so that everybody doesn’t have to reinvent the process. As I stated in the OP, I’m no expert and this latest issue that I’m experiencing has shown that once again. Let’s keep sharing what we are doing until we have a process that works for these motors. Thanks! -Marc
1 Like
Low voltage battery cut off maybe ? 10s : 32v or voltage sag from the battery itseft if running low nb // on 10s
Going to 12 to 10s
Most of the time , kicks in comes from motor max amp , 130A is nice
You can always redo from start by loading default value and run wizard
Always save remote and motor config in folder , named after each changes so you can go back any time
1 Like
Alexandre.
You mentioned Battery voltage cut off : 38v
Should this be the Battery voltage cutoff Start or Battery voltage cutoff End?
@HighAltitude I did not really notice any difference motor wise, however I needed to redo the min and max throttle (timing) settings. (could have been caused by a misstake from me)
It depends on cells type ( voltage sag …) , amps draw ( weight and wing )
For exemple : i used 12s8p 30q , at the end cells got hot and got voltage sag : low speed , no point to go below 3,3v / cells …
Just test what feels confortable , the lower you go the more you will « domage the cells »
The start upper limit will on voltage will lower your duty to a point where it gets annoying to take off ( but it depends on above … )
It’s hope to you to fix the limit after testing , anything above 3v should be fined and increasing the delta between two values will give you a warning that its time to gets back to shore …
2 Likes
Yeah…lesson learned on my part. I won’t make that mistake again.
Of course the weather just turned really cold in Colorado so the foil is in the basement instead of the water.
BTW…your amp draw seems perfectly in line with what I see when I bench test the motor in my shop. Your setup might be ready for the water.
Thanks for your help! I had two problems. First was the Motor - Max amps. It had went down to 60A which is just slightly less than I need to get the board out of the water. I raised it to 120A and the board popped right out of the water.
The second issue was a cooling problem. Long story short…after about 5 minutes foiling, the power suddenly went back down. When I limped it back to shore and opened up the box, the VESC was very hot. Cooled it in some nice 42F water, fixed the cooling and off I went again!
I plan to make some changes to the original post to take into account what I have learned.
2 Likes
Were your batteries charged before both tests and how long had you run the motor before snapping the screenshot? Different voltages are the only reason I can think for different RPMs.