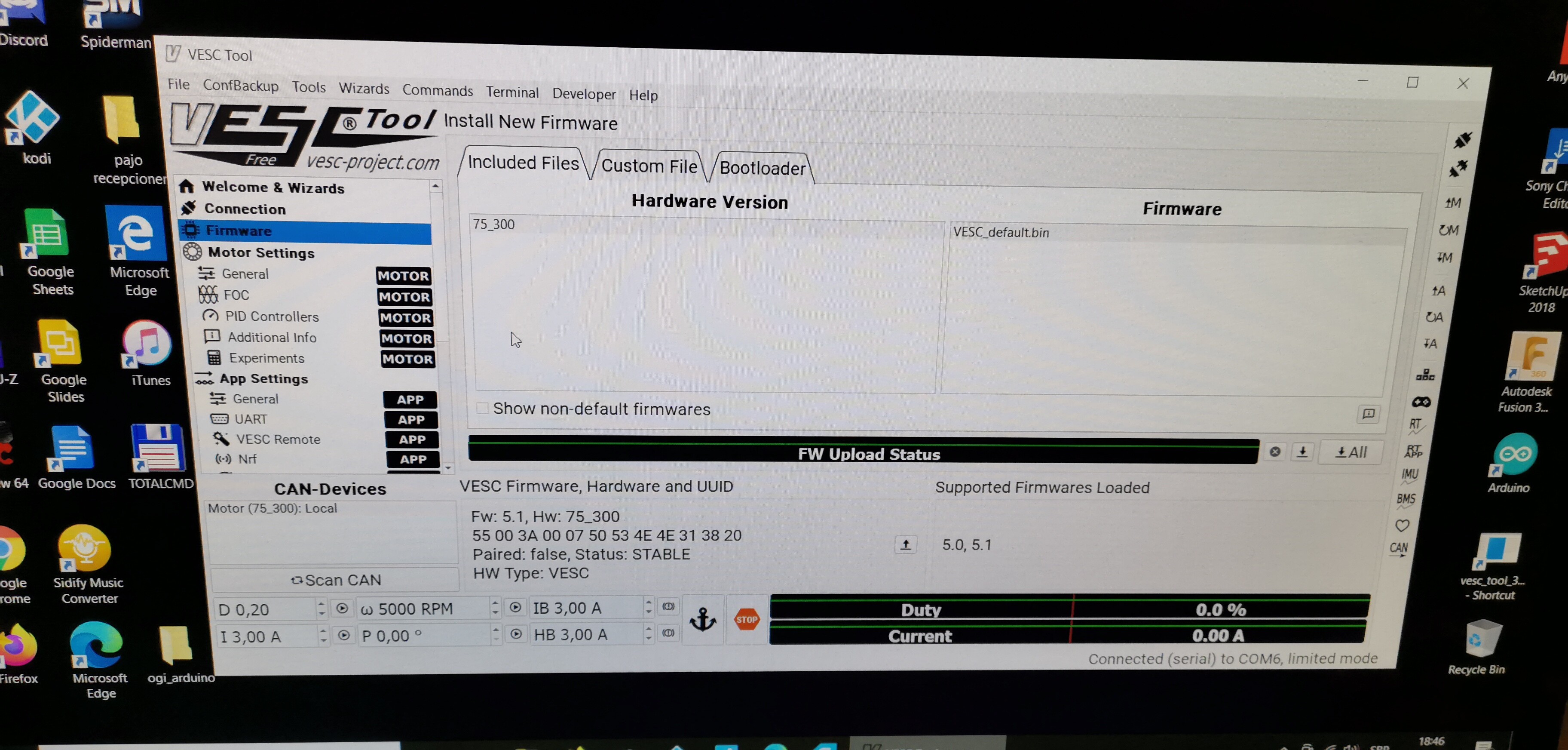
Just recieved from flipsky FSESC75200 75V and 65161 120kv Motor with vx1 remote. I am having problems with connecting remote. In vesc tool 3.0 on Windows 10 and usb connection. After setting up motor I am trying setup input but without success.
After update firmware I am getting same message… Any help?
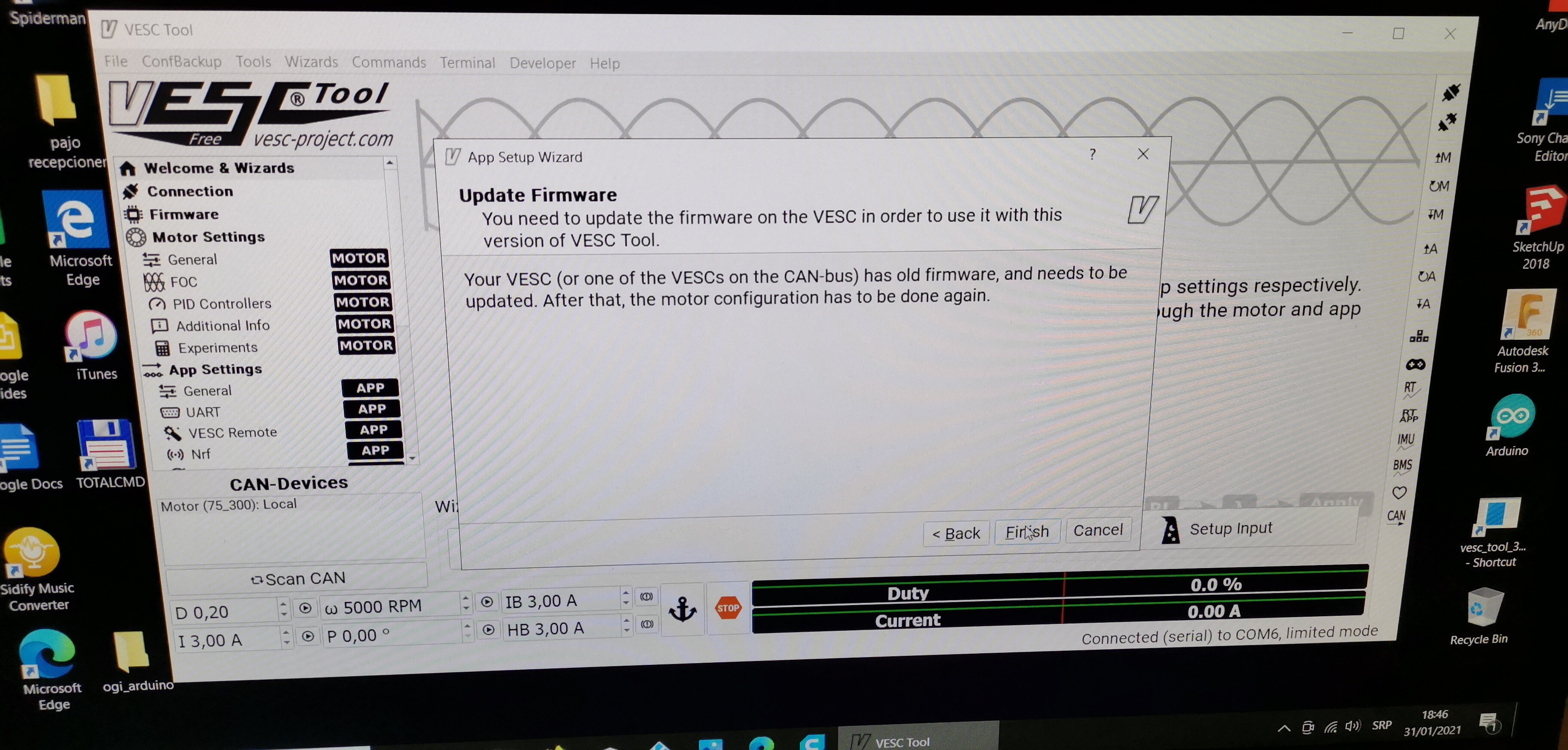
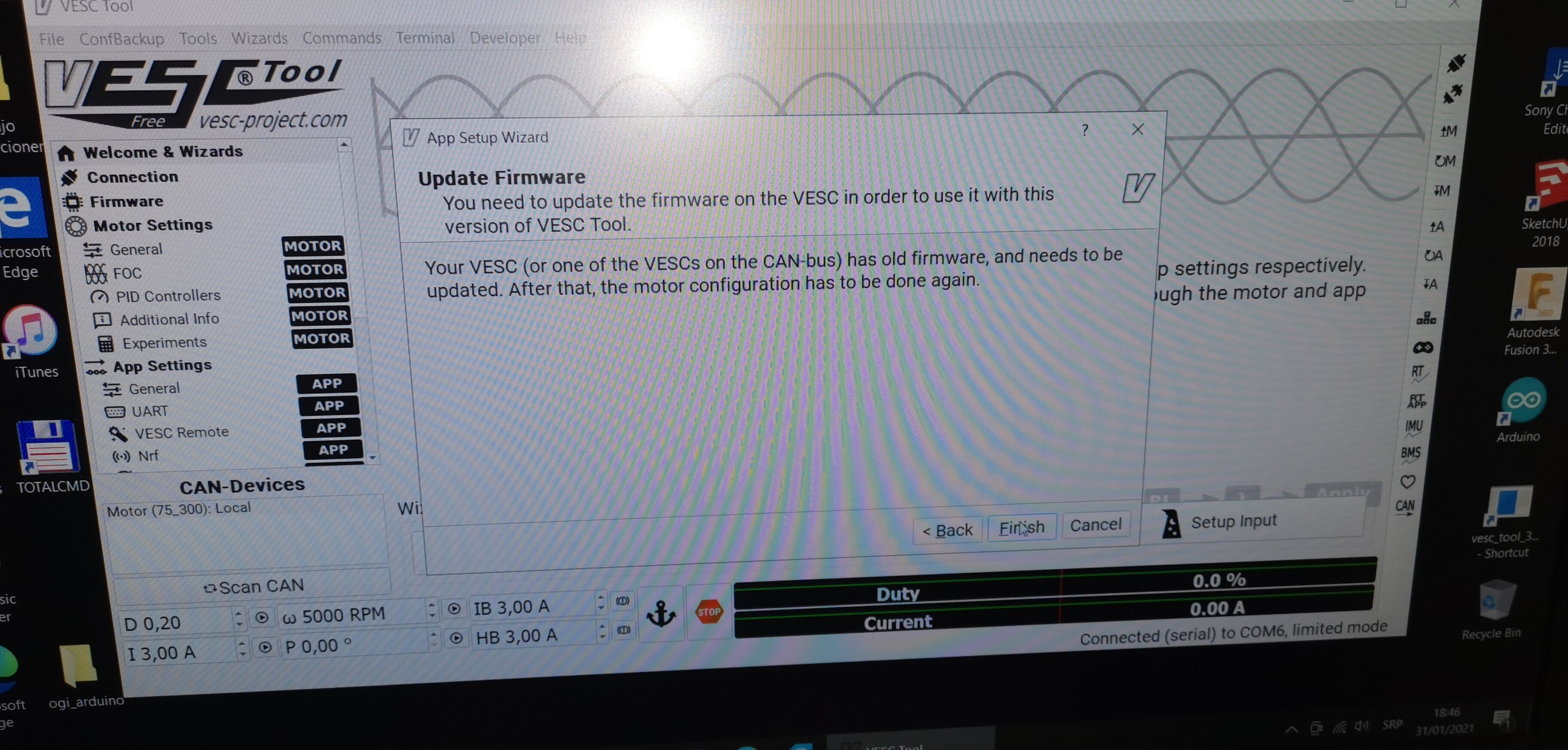
I think the firmware update through vesc tool does not work, but if you use the latest 2.0.x VESC Tool it should match the firmware of your vesc and allow you to use the input setzp wizzard.
Thanks, Yes looks like vesc 3.0 not compatible with firmware. Do you have any link for 2.0.x vesc?
You can download it for free from here: VESC Project
You need to setup an account
Or get the older versions from here:
3 Likes
Thanks a lot, it’s working with precompiled vesc 2.06.
Once you updated the firmware are you still getting this message?
Have you been able to use the setup wizard?
With vesc tool 3.0 I am still getting message, even after update firmware. But with vesc tool 2.06 don’t have any message and it’s possible to use wizard. I’ve noticed that is possible manually to setup parameters and remote will work. Now vx1 is working but it’s too responsive…
What does “too responsive” mean?
I suppose because there is no load on motor that remote is too sensitive… Sorry because of my Tarzan English
No worries, Some people had a hard time with their remote. The throttle response would not cover the entire range of RPMs the motor was designed to generate. Just wanted to make sure that wasn’t a problem for you.
1 Like
This is a very simple and interesting 2016 VESC config web tool that deserves some attention and update: 'http://config.esk8.it/
Divided by sections, each XML VESC configuration appear in one page instead of 8 tabs and can be shared and compared using https://editor.mergely.com/
Description:
2 Likes
Possibly the first time i’ve posted here…
I’ve done quite a lot of vesc stuff on skateboards but this is the first time with the big flipsky inrunners and 200a esc.
I’ve set up as BLDC as in the first post. Very handy tip as FOC was dreadful. I even lost a few hours of my life on HFi…
Anyway, selected 6 poles also and the slow speed startup is really good. Trouble comes as the speed picks up and the motor starts stuttering at higher RPM. Anyone have only thoughts or experience with this?
2 Likes
Thanks for the input Bigben. The VESC is still a mystery to me.
I’ve got it running a little better on the bench now but still a few hiccups in the midrange.
After it’s all setup try FOC again. I was able to run smooth at a couple hundred more RPM in this mode. For some reason I had the “stuttering” when originally setting it up.
I’ll be doing a major update to this thread soon as I’m getting ready to setup another motor.
1 Like
I’ll give it a go.
Had it out today just testing, the motor seems to bog or cog around mid speed. Going to have a tweak and try again Monday.
Sorry to bump up this “old” post, but I’m hoping someone here can help me with the following problem.
I would like (and this was the initial plan) use two (2) High Current FSESC 200A 60V vesc from Flipsky.
However. the VESC’s do not let the motors run faster than 32000 RPM’s (measured with a tachometer). (the Vesc tool is showing us 66800 ERPM).
The motors have 4 poles. That is 2 pairs. So 66800/2=33400 RPM
(Pretty close to what we got with the tachometer.)
However. This is still way lower RPM’s than what we get with the same setup, but instead of using a Flipsky we use a Flier ESC. (no load on the motors)
We did play with some settings in the Flipsky, and the only thing giving it a little bit more RPM’s was by changing the Switching Frequency all the way up to 60 kHz. (can not set it any higher as Vesc tools will not let us)
The Flipsky is using the “VESC_default_no_hw_limit” firmware.
Motor is setup as FOC.
Anyone here who might know how we can get more RPM’s?
There is a setting on the vesc for max duty cycle (for FOC mode only i think?). The default is 95% to allow for some wiggleroom. Some DRVs were popping back at 100% in the past on skateboards. In another thread people had pushed that higher on efoils. BLDC mode might get higher as well and may have slightly more power then FOC mode.
1 Like
What kv ?
600x 12 x 4,2 x .95 = 28k
Maybe there is a problem with the flier , and may be you will have less rpm drop under load on foc
1 Like
Thank you @brycej we are going to have a look at this.
@Alexandre the motor(s) are in this setup 730KV.
So 730x12x4.2x0.95 = 34952.4.
Again close to what we got with the tachometer and Vesc tool.
However. The fliers (I have 3 here) all give more RPM’s, and we are pretty sure that there is no problem with the Flier ESC’s.
a friend here changed his Flier to a Flipsky, and he had the same problem.
Basically he could foil with his Flier setup and his 3d printed prop. After changing to a Flipsky, it did not even come close to going fast enough to foil.
Again. At this moment we are testing on the bench with no load on the motor(s).
We did have this setup in the board, and speed was really low.