So I thought I would add my mechanically simplified explanation that I have developed by problem solving and not knowing anything about electrics, electronics or software. Less to do with programming an more to do with understanding how the VESC makes your system work.
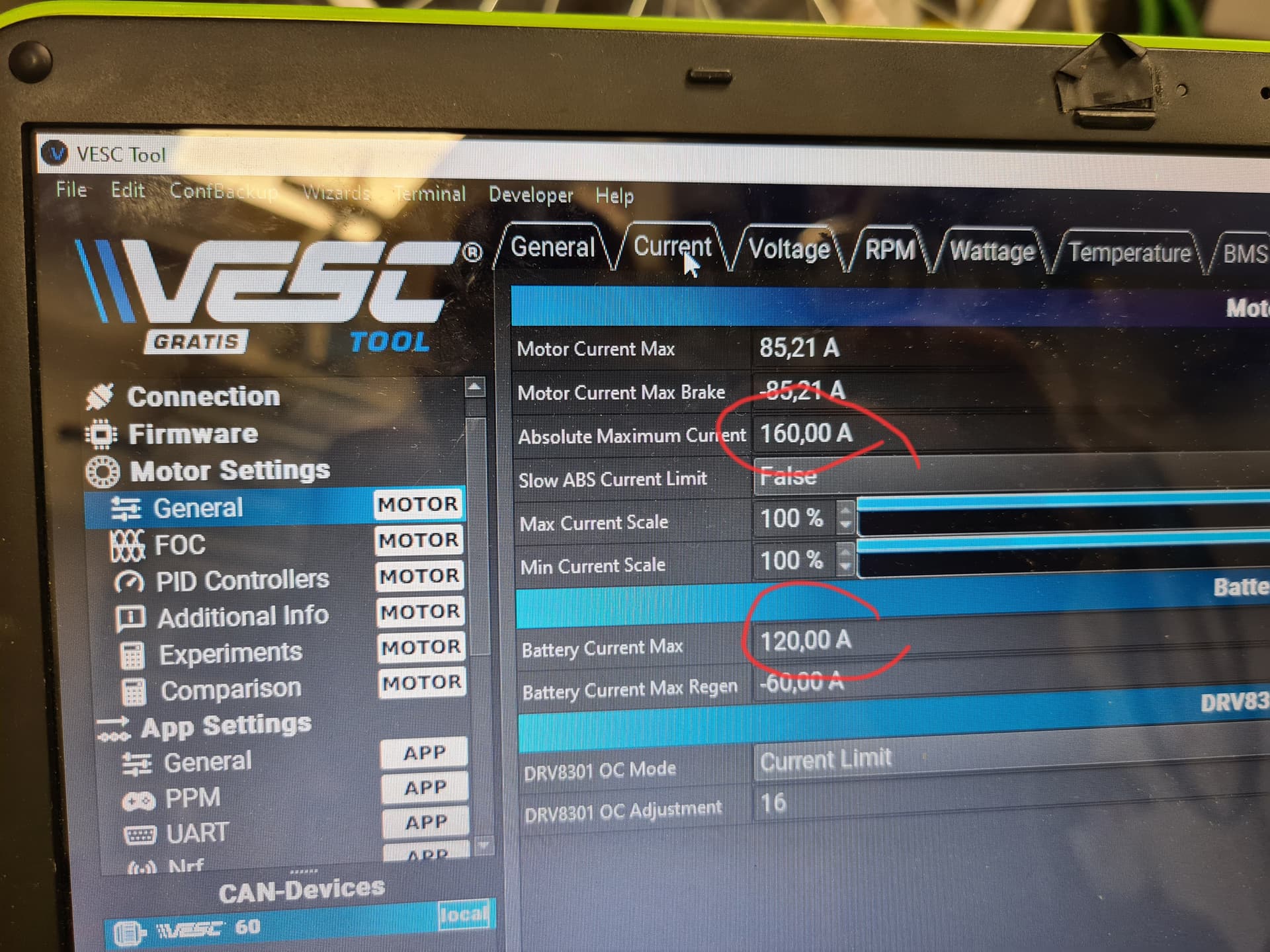
This is the short version: you should aim to have your motor and battery Amps as close to each other as possible (motor will always be slightly higher it seems) ie if your motor is 4kW then aim for a battery Amps of that amount and start with a motor Amps slightly above that and work your motor Amps up according to your setup and see if your performance gets better or worse.
Heres how you know if you are going in the right direction or not: If you up your motor amps (say 30-40V above the battery kW max Amps or until your motor leads get warm) and it makes a slight or marginal improvement then your setup (ie prop) is to blame and not the motor or VESC or your settings, so your battery Amps never gets to max and you are full throttle. This is the take home from this, higher motor Amps (or if motor amps maxes before battery amps maxes) means your system is overtorqued and maxing your battery amps means you are undertorqued or have not reached you absolute max speed yet. In other words the motor is trying all it can to get to where you want it but it never will, hence the motor amps maxing out.
If your setup creates the motor amps to max out long before the battery amps maxes then the VESC will overheat very quickly!
This is the long how I got there explanation:
So this is from countess hours of working through setups, onto the water a couple of times a day to test and tweak to work out how these VESC to motor relationships work. I have a box full of props that I have tried, different dia, diff blade numbers, diff blade sizes/area, diff dimensions etc, off the shelf props like Flite and so on all on a 4kw outrunner.
This seems to be a trend that I have noticed and forgive me if I am wrong but it seemed to work for me to get to and understand of how the VESC, motor and prop all work together and get things working in the right direction.
Firstly I started with the MakerX HI100 as I had no idea what Motor Amps and Battery Amps meant, so I assumed they were the same thing. That seems to be and I’m sure it is where I went wrong initially. So I wanted to get 4kw out of my motor and thought well at 48V that around 80-100A depending on voltage sag etc.
So what I know now is that Motor Amps and Battery Amps (Motor can be 100A while Motor can be 50A as an example) are not the same but seem to have this relationship. The kW of your motor is where you should aim to be so for simplistic case 40V x 100A = 4kW is what I was aiming for the battery. But in 90% of my tests I never saw anywhere close to this number (100A battery) so I started cranking up the Motor Amps while changing props and noticed a less pitchy prop got closer to the 100A and a very pitchy one not. I also noticed that the lower the battery amps and higher the motor amps the faster the VESC heated up regardless of throttle position over 50%.
At this point I moved over to a HI200 as I thought the VESC was to small due to such rapid heating up. Ran the best settings I had seen that far and the HI200 made zero difference and heated up nearly the same amount but only took slightly longer, so in my mind no improvement.
So at this point I had to rethink things and try work out what was going on here as surely a HI200 was way more than I needed. Also still not entirely sure if HI200 means 200A motor or battery? I assume motor as that the one that will always be higher but I could be wrong.
So the above motor amps to battery amps relationship seems to be as follows, to much load on the motor means high motor current without the motor being able to get to its max kW or amps. This mismatch of motor and battery amps heats the VESC up very fast, my one went from 25deg to 90deg in 20sec and it had additional cooling. So the load can be caused by few things together or individually, prop pitch, prop dia, blade area and number of blades or the overall load on the system like how heavy the rider is as all these things are trying to be overcome by the motor, VESC and Battery.
As soon as I realized this relationship I could very easily come up with better choices for the motor and VESC numbers. Now I have a setup where the battery amps and the motor amps are much closer and my speed has gone up by 40% and VESC temp does not go above 42deg no matter how long I go 50% throttle or above.
So lower motor amps (closer to battery amps) is lower VESC temp and less overloading of the motor while at the same time reaching the full potential of the motor kW by drawing max battery amps while doing that.
Just a side note that when you do the motor detection in VESC tool make sure that there is nothing attached to the motor, so output shaft must have nothing attached or anything touching to add any resistance while the detection is being done, it must be a bare motor. I did not know this but perhaps its common knowledge or in the manual which I did not read, but thought it is worth mentioning.