This week we received our nice blue HighFly 3-blade P=6" D=6" propeller (of previous Flying Rodeo fame).
It took some effort to install it on our motor, since we made the mistake early on to buy the splined version of the Maytech 65162. This involved drilling the propeller hub (scary, expensive prop), and, even scarier, the motor shaft. But everything went fine.
So today, in spite of the bad weather, we were really excited to try it and we were not disappointed. Best performance so far!
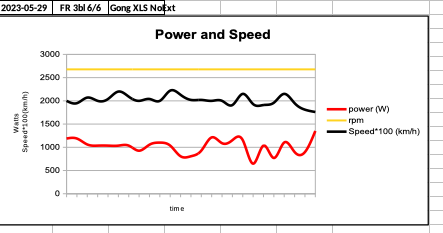
Power (in red): between 750W and 1000W (when not rocking the boat)
Speed (in black): around 20 km/h
Foil: GONG XLS 1500 cm2
Propeller: HighFly 3 blades P=6" D=6"
Just a tip:
The curves would be easier to interpret and use plotted as power over speed and power over rpm (instead of over time) as time is not actually a factor of interest in these tests.
How do you get the data for each point? (I didn’t read the whole thread so might’ve missed this)
Hi Lars,
To me, the curve makes sense: I am just trying to see how the power consumption evolves during the ride, and what my speed is during the ride. I can see that the power going up corresponds to speed going down, etc…
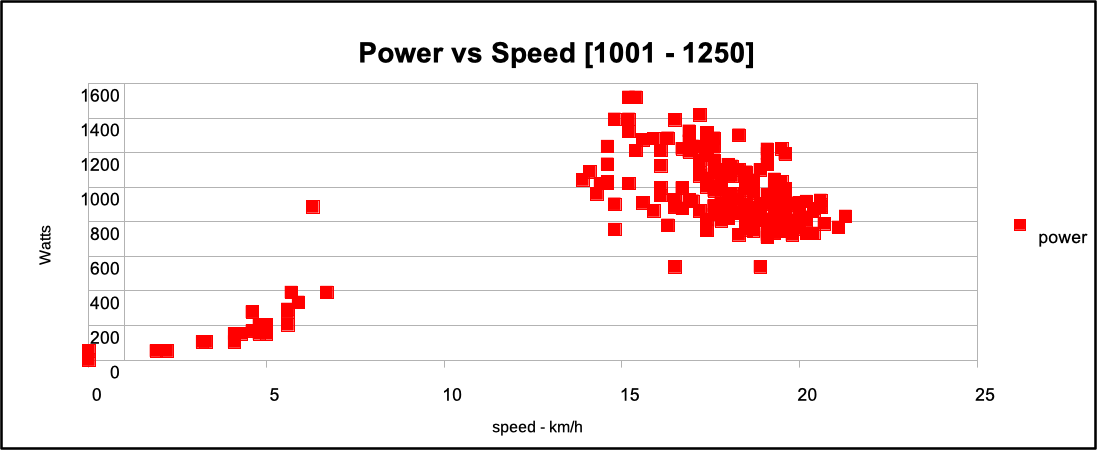
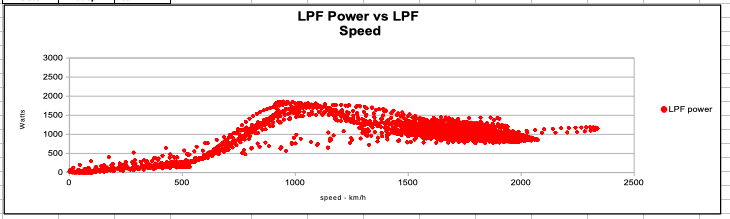
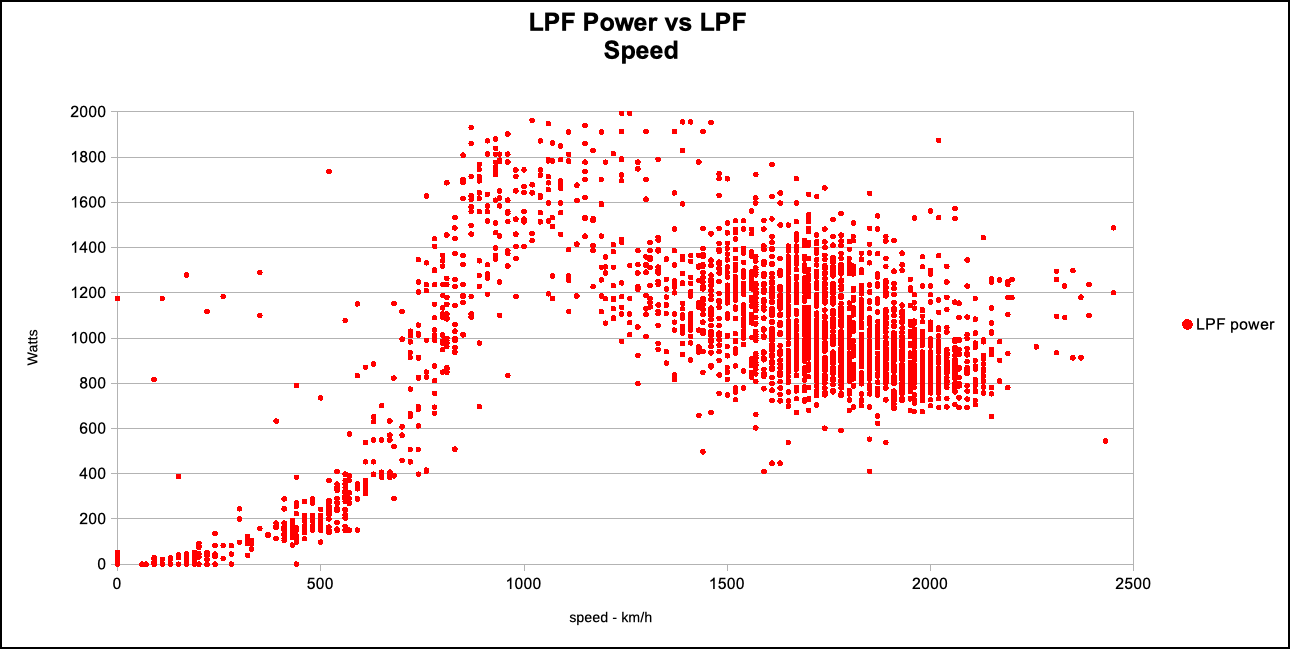
Plotting power vs speed is possible, but I get this, which gives me less information at this point: (but it’s true that it shows what is the max and min speed)
What i mean is that the natural performance number for each propeller would be wh/km at a certain base speed or required power per speed.
The spread in the chart shows that the data is hard to use for any judgment since spread is so large (from 450w to 750w at 15kph is 1.6x the power for the same speed).
I guess that’s caused by the riding conditions and riding but it creates the question what is the true number for each propeller to be used for performance comparison.
Yes there is a lot of spread, that why my first impulse was to only use power and speed versus time. It shows that the power increases when you make up and down moves or side to side zigzags, etc…
But in the end, maybe the “scatter dot” chart of power vs. speed is not a bad way to compare setups. That gives you an honest picture of the ride. (with smaller dots, it looks a little more decent)
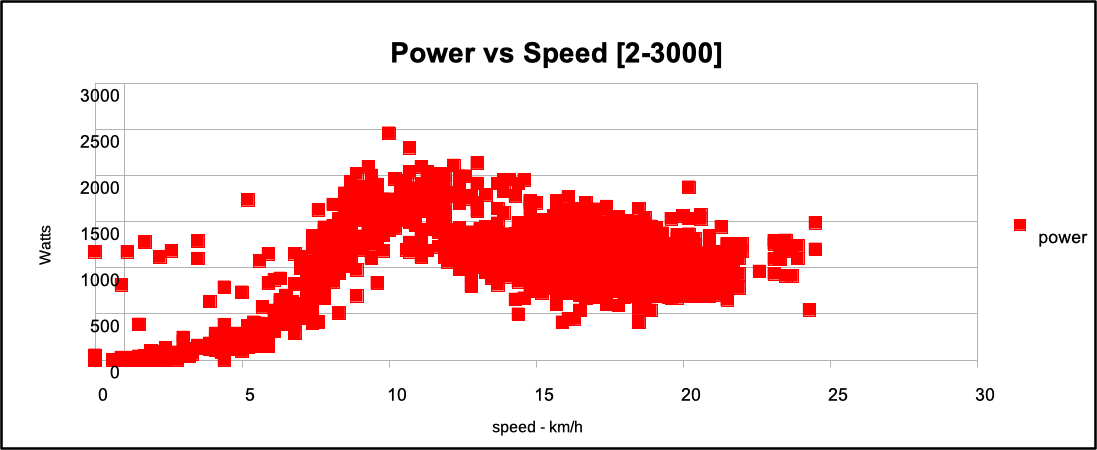
For speeds up to 10 km/h, we are in boating mode, hence the classical speed**2.7 curve. Above 15 km/h, we are most of the time in foiling mode. In between, we are in planning mode.
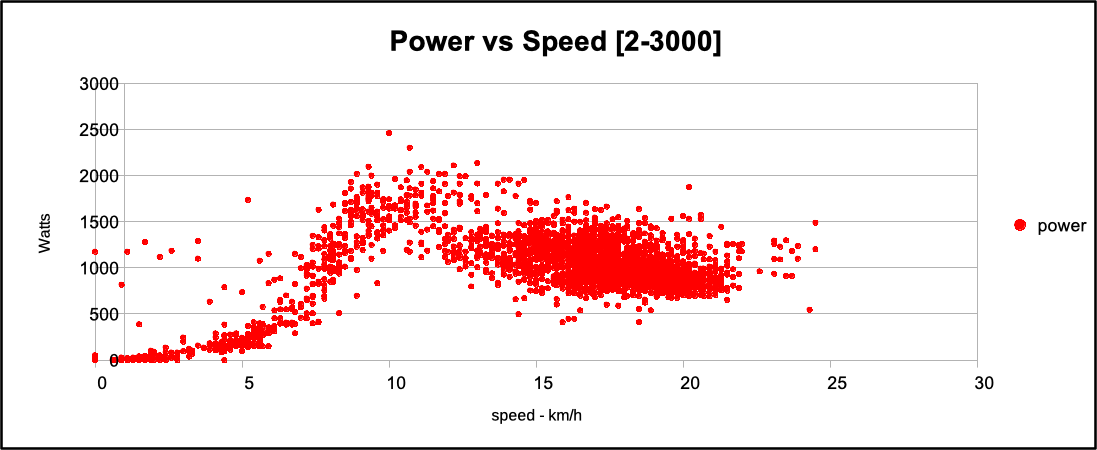
This is obtained with the FR propeller. You can compare it with the Yamaha propeller cut to 6" diameter, below:
Do you have a way of allowing the speed to stabilise between two measurements? This would reduce the spread of the scatterplot and allow a best-fit curve to pass through. This could mean a software mod “While speed isn’t within X% variation, take another point”
It’s not a problem of cruise control: The time graph shows that the rpm is steady. It think it’s just that the power and speed vary when you move the board a little bit, up and down, or left and right. I was just riding, having fun. Next time I will ride straight, with as little movement as possible to see what kind of curve I get.
Yes, I agree. It must have to do with the propeller as you say. The FR propeller is very inefficient and low speeds (“boating mode”) and very efficient at high speeds. I wonder if we have the parameters that were used in designing the prop? Target speed / rpm / thrust etc…
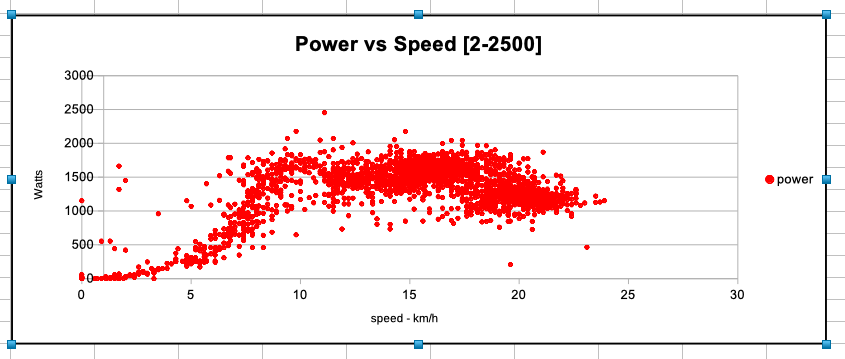
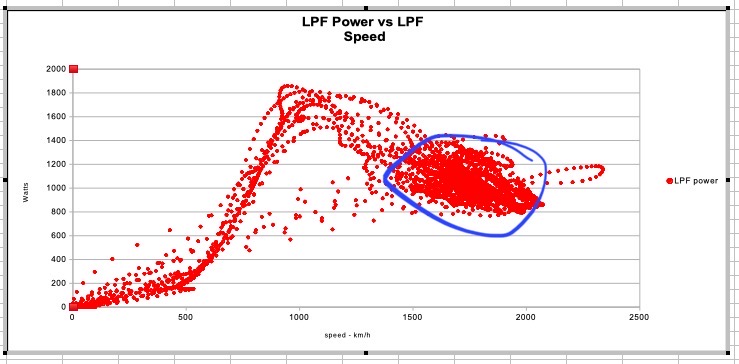
If you increase the Y scale, you get this below, which clearly (lol) highlights various modes of operation of the eFoil. The area circled in blue corresponds to the Foil Zone…
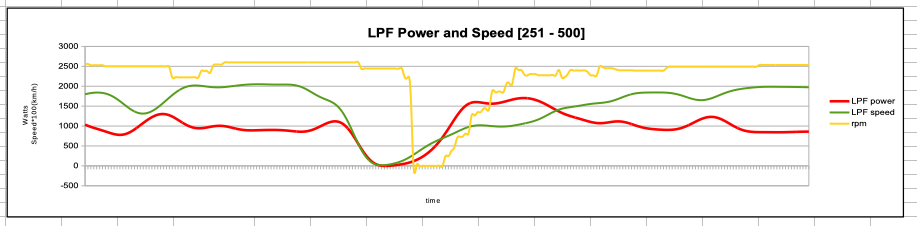
Actually I think we’re on to something as far as analysis in concerned. Filtering will be quite useful. The corresponding unfiltered data looks like this:
How noisy is your setup?
I need some suggestions to make mine quieter. I printed this rubber pad to put between the board and baseplate of the mast. Any other suggestions?
No… My husband designed and built the ESC and for some reason, we cannot run FOC. Is FOC known to be quieter?
Also, my board is very thick (GONG Mint). I’m wondering if it’s not acting as a sounding board?
Some FOC ESCs are quieter than others… FreeFLY ARC200 (discontinued since sept. 2019) was quieter than VESC in FOC mode quieter than APD200F3 according to @Jezza.
Signal processing helps as described here:
This explains your noise issues. I strongly recommend to take another look at FOC instead of damping pads, different board etc.
Generally 6-step capable motor controllers should be able to run FOC. Running FOC requires more processing power, but the power stage, current sampling and BEMF sampling should work with the same hardware resources.
Are you writing the controller code from scratch or following VESC / ST MCSDK / something else?