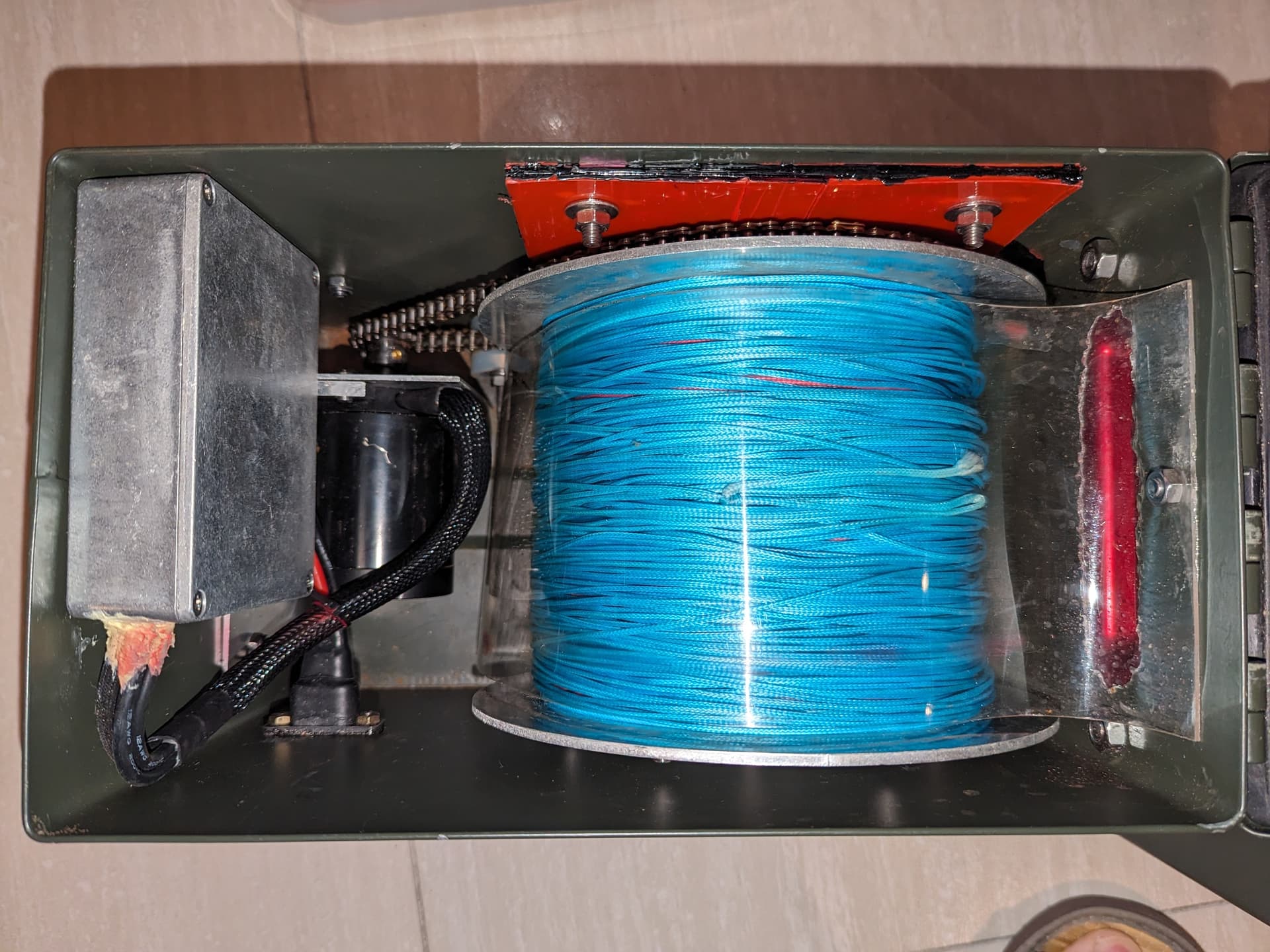
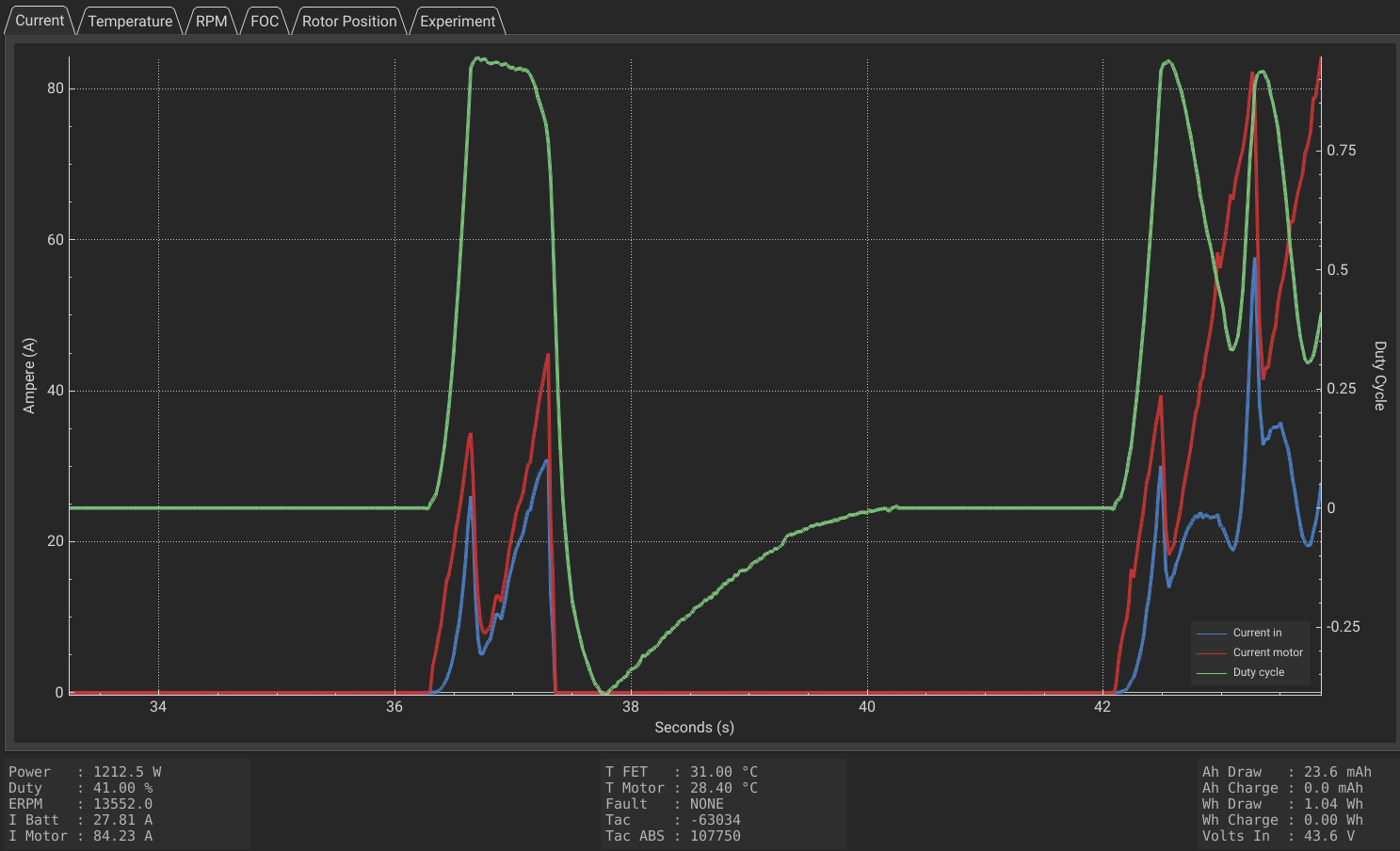
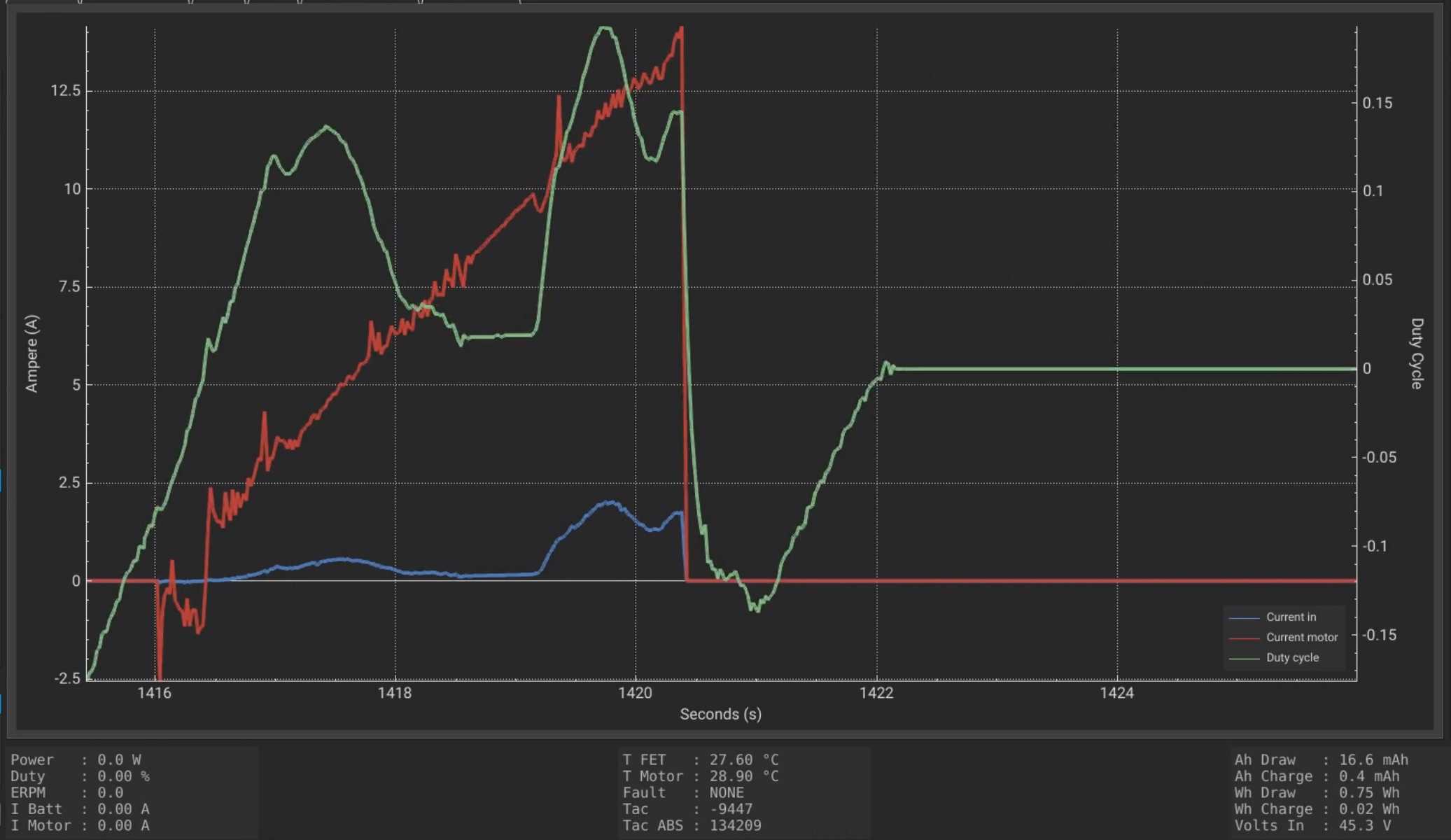
Unloaded RPM yields 25.5 km/h using almost no power.
RPM with spool yields 25.5 km/h using about 1.5 amps.
So, these numbers are roughly inline with the theoretical value of 28 km/h, and probably lower due to 95 max duty and other possible stress limiting settings.
And I understand that under heavy loads, RPMs would in theory go down. But, maybe my understanding is off here - wouldn’t the current increase first to give more torque? Or said another way, if the motor got 60 amps (double) in this scenario, it would be able to spin faster, correct?
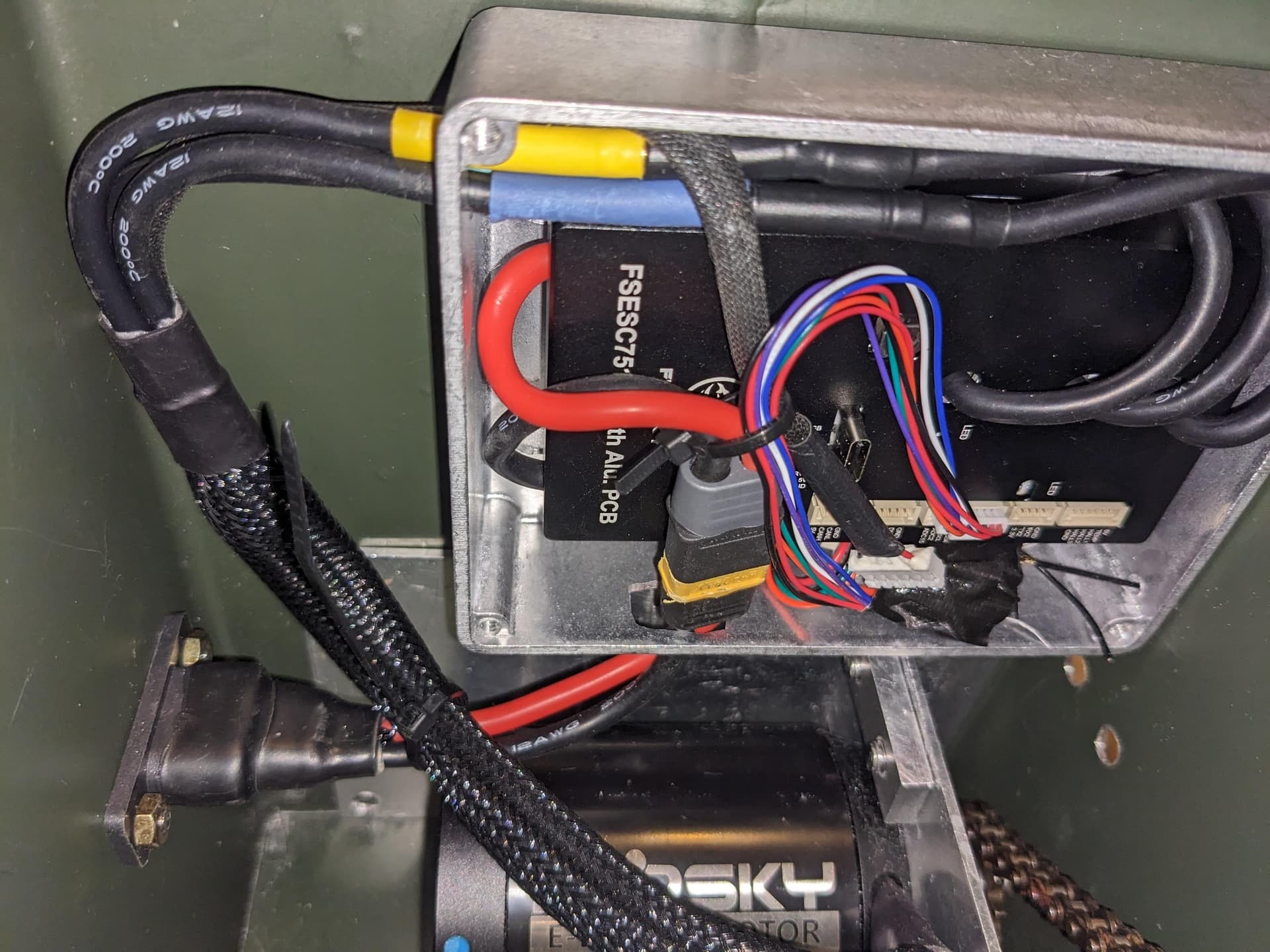
Regarding the heat issue, I did try and feel the motor while at the beach and it wasn’t particularly hot. Additionally, the runs are only ~20s long so I can’t imagine it overheating that quickly. This issue was also present from the first run. I’ll look into this more carefully next time as well as the speed control temperature as it does seem like the most plausible explanation at the moment. Perhaps a heat sensor is busted.
Also, I am running the motor in sensored mode in case it matters.
@Jezza To answer your questions
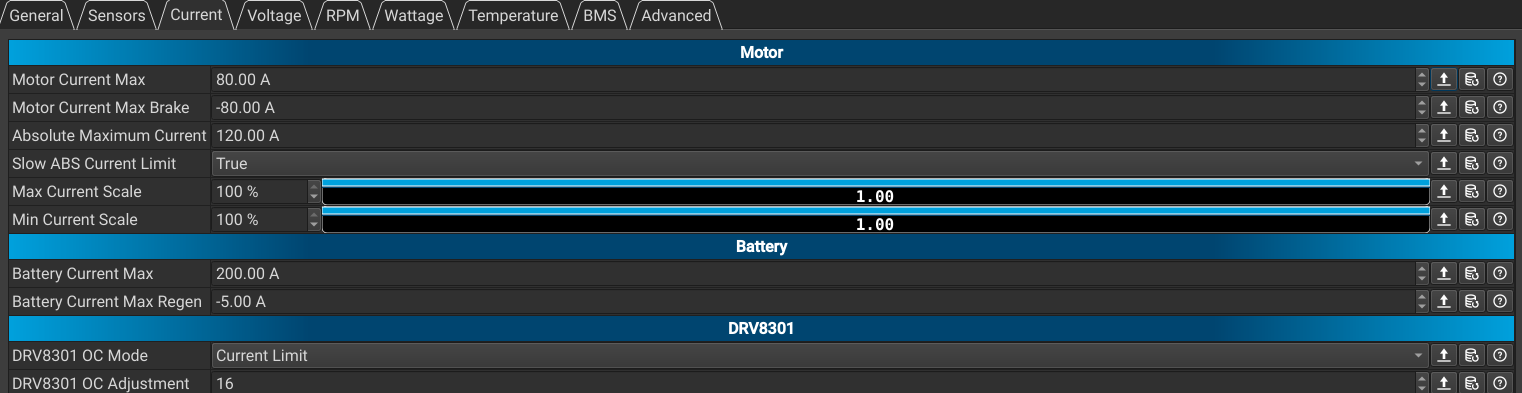
Max Current: 80 amps
Max Power: 1500000 watts
Max eRPM: 100000 (I’m guessing this is fine given that the motor can reach higher speeds under less load)
I think my next step will be to figure out a way to pull various loads across the beach and try to figure out what the speed vs load curve looks like while taking note of the motor and speed control temperatures. It’s really the only thing I can think of. Also, I will look into figuring out how to monitoring live VESC info with my laptop at the beach to see if anything jumps out at me.
I’m also including an export of all the settings as C header files for reference. This seemed much more readable than XML.
motor configuration header
// This file is autogenerated by VESC Tool
#ifndef MCCONF_DEFAULT_H_
#define MCCONF_DEFAULT_H_
// PWM Mode
#define MCCONF_PWM_MODE 1
// Commutation Mode
#define MCCONF_COMM_MODE 0
// Motor Type
#define MCCONF_DEFAULT_MOTOR_TYPE 2
// Sensor Mode
#define MCCONF_SENSOR_MODE 0
// Motor Current Max
#define MCCONF_L_CURRENT_MAX 80
// Motor Current Max Brake
#define MCCONF_L_CURRENT_MIN -80
// Battery Current Max
#define MCCONF_L_IN_CURRENT_MAX 200
// Battery Current Max Regen
#define MCCONF_L_IN_CURRENT_MIN -5
// Absolute Maximum Current
#define MCCONF_L_MAX_ABS_CURRENT 120
// Max ERPM Reverse
#define MCCONF_L_RPM_MIN -100000
// Max ERPM
#define MCCONF_L_RPM_MAX 100000
// ERPM Limit Start
#define MCCONF_L_RPM_START 0.8
// Max ERPM Full Brake
#define MCCONF_L_CURR_MAX_RPM_FBRAKE 300
// Max ERPM Full Brake Current Control
#define MCCONF_L_CURR_MAX_RPM_FBRAKE_CC 1500
// Minimum Input Voltage
#define MCCONF_L_MIN_VOLTAGE 12
// Maximum Input Voltage
#define MCCONF_L_MAX_VOLTAGE 72
// Battery Voltage Cutoff Start
#define MCCONF_L_BATTERY_CUT_START 43.2
// Battery Voltage Cutoff End
#define MCCONF_L_BATTERY_CUT_END 42
// Slow ABS Current Limit
#define MCCONF_L_SLOW_ABS_OVERCURRENT 1
// MOSFET Temp Cutoff Start
#define MCCONF_L_LIM_TEMP_FET_START 85
// MOSFET Temp Cutoff End
#define MCCONF_L_LIM_TEMP_FET_END 100
// Motor Temp Cutoff Start
#define MCCONF_L_LIM_TEMP_MOTOR_START 85
// Motor Temp Cutoff End
#define MCCONF_L_LIM_TEMP_MOTOR_END 100
// Acceleration Temperature Decrease
#define MCCONF_L_LIM_TEMP_ACCEL_DEC 0.15
// Minimum Duty Cycle
#define MCCONF_L_MIN_DUTY 0.005
// Maximum Duty Cycle
#define MCCONF_L_MAX_DUTY 0.95
// Maximum Wattage
#define MCCONF_L_WATT_MAX 1.5e+06
// Maximum Braking Wattage
#define MCCONF_L_WATT_MIN -1.5e+06
// Max Current Scale
#define MCCONF_L_CURRENT_MAX_SCALE 1
// Min Current Scale
#define MCCONF_L_CURRENT_MIN_SCALE 1
// Duty Cycle Current Limit Start
#define MCCONF_L_DUTY_START 0.85
// Minimum ERPM
#define MCCONF_SL_MIN_RPM 150
// Minimum ERPM Integrator
#define MCCONF_SL_MIN_ERPM_CYCLE_INT_LIMIT 1100
// Max Brake Current at Direction Change
#define MCCONF_SL_MAX_FB_CURR_DIR_CHANGE 10
// Cycle Integrator Limit
#define MCCONF_SL_CYCLE_INT_LIMIT 62
// Phase Advance at BR ERPM
#define MCCONF_SL_PHASE_ADVANCE_AT_BR 0.8
// BR ERPM
#define MCCONF_SL_CYCLE_INT_BR 80000
// BEMF Coupling
#define MCCONF_SL_BEMF_COUPLING_K 600
// Hall Table [0]
#define MCCONF_HALL_TAB_0 -1
// Hall Table [1]
#define MCCONF_HALL_TAB_1 1
// Hall Table [2]
#define MCCONF_HALL_TAB_2 3
// Hall Table [3]
#define MCCONF_HALL_TAB_3 2
// Hall Table [4]
#define MCCONF_HALL_TAB_4 5
// Hall Table [5]
#define MCCONF_HALL_TAB_5 6
// Hall Table [6]
#define MCCONF_HALL_TAB_6 4
// Hall Table [7]
#define MCCONF_HALL_TAB_7 -1
// Sensorless ERPM Hybrid
#define MCCONF_HALL_ERPM 2000
// Current KP
#define MCCONF_FOC_CURRENT_KP 0.00807825
// Current KI
#define MCCONF_FOC_CURRENT_KI 13.9811
// Switching Frequency
#define MCCONF_FOC_F_SW 30000
// Dead Time Compensation
#define MCCONF_FOC_DT_US 0.12
// Encoder Inverted
#define MCCONF_FOC_ENCODER_INVERTED 0
// Encoder Offset
#define MCCONF_FOC_ENCODER_OFFSET 180
// Encoder Ratio
#define MCCONF_FOC_ENCODER_RATIO 7
// Sin/Cos Sine Gain Compensation
#define MCCONF_FOC_ENCODER_SIN_GAIN 1
// Sin/Cos Cosine Gain Compensation
#define MCCONF_FOC_ENCODER_COS_GAIN 1
// Sin/Cos Sine Offset
#define MCCONF_FOC_ENCODER_SIN_OFFSET 1.65
// Sin/Cos Cosine Offset
#define MCCONF_FOC_ENCODER_COS_OFFSET 1.65
// Sin/Cos Filter Constant
#define MCCONF_FOC_ENCODER_SINCOS_FILTER 0.5
// Sensor Mode
#define MCCONF_FOC_SENSOR_MODE 2
// Speed Tracker Kp
#define MCCONF_FOC_PLL_KP 2000
// Speed Tracker Ki
#define MCCONF_FOC_PLL_KI 30000
// Motor Inductance (L)
#define MCCONF_FOC_MOTOR_L 8.07825e-06
// Motor Inductance Difference (Ld - Lq)
#define MCCONF_FOC_MOTOR_LD_LQ_DIFF 0
// Motor Resistance (R)
#define MCCONF_FOC_MOTOR_R 0.0139811
// Motor Flux Linkage (λ)
#define MCCONF_FOC_MOTOR_FLUX_LINKAGE 0.00507544
// Observer Gain (x1M)
#define MCCONF_FOC_OBSERVER_GAIN 3.88197e+07
// Observer Gain At Minimum Duty
#define MCCONF_FOC_OBSERVER_GAIN_SLOW 0.05
// Duty Downramp Kp
#define MCCONF_FOC_DUTY_DOWNRAMP_KP 10
// Duty Downramp Ki
#define MCCONF_FOC_DUTY_DOWNRAMP_KI 200
// Openloop ERPM
#define MCCONF_FOC_OPENLOOP_RPM 700
// Openloop ERPM at Min Current
#define MCCONF_FOC_OPENLOOP_RPM_LOW 0
// D Axis Gain Scaling Start
#define MCCONF_FOC_D_GAIN_SCALE_START 0.9
// D Axis Gain Scaling at Max Mod
#define MCCONF_FOC_D_GAIN_SCALE_MAX_MOD 0.2
// Openloop Hysteresis
#define MCCONF_FOC_SL_OPENLOOP_HYST 0.1
// Openloop Lock Time
#define MCCONF_FOC_SL_OPENLOOP_T_LOCK 0
// Openloop Ramp Time
#define MCCONF_FOC_SL_OPENLOOP_T_RAMP 0.1
// Openloop Time
#define MCCONF_FOC_SL_OPENLOOP_TIME 0.05
// Hall Table [0]
#define MCCONF_FOC_HALL_TAB_0 255
// Hall Table [1]
#define MCCONF_FOC_HALL_TAB_1 24
// Hall Table [2]
#define MCCONF_FOC_HALL_TAB_2 159
// Hall Table [3]
#define MCCONF_FOC_HALL_TAB_3 189
// Hall Table [4]
#define MCCONF_FOC_HALL_TAB_4 88
// Hall Table [5]
#define MCCONF_FOC_HALL_TAB_5 58
// Hall Table [6]
#define MCCONF_FOC_HALL_TAB_6 124
// Hall Table [7]
#define MCCONF_FOC_HALL_TAB_7 255
// Hall Interpolation ERPM
#define MCCONF_FOC_HALL_INTERP_ERPM 500
// Sensorless ERPM
#define MCCONF_FOC_SL_ERPM 4000
// Sample in V0 and V7
#define MCCONF_FOC_SAMPLE_V0_V7 0
// High Current Sampling Mode
#define MCCONF_FOC_SAMPLE_HIGH_CURRENT 0
// Stator Saturation Compensation
#define MCCONF_FOC_SAT_COMP 0
// Temp Comp
#define MCCONF_FOC_TEMP_COMP 0
// Temp Comp Base Temp
#define MCCONF_FOC_TEMP_COMP_BASE_TEMP 25
// Current Filter Constant
#define MCCONF_FOC_CURRENT_FILTER_CONST 0.1
// Current Controller Decoupling
#define MCCONF_FOC_CC_DECOUPLING 2
// Observer Type
#define MCCONF_FOC_OBSERVER_TYPE 0
// HFI Start Voltage
#define MCCONF_FOC_HFI_VOLTAGE_START 20
// HFI Run Voltage
#define MCCONF_FOC_HFI_VOLTAGE_RUN 4
// HFI Max Voltage
#define MCCONF_FOC_HFI_VOLTAGE_MAX 10
// Sensorless ERPM HFI
#define MCCONF_FOC_SL_ERPM_HFI 2000
// HFI Start Samples
#define MCCONF_FOC_HFI_START_SAMPLES 65
// HFI Observer Override Time
#define MCCONF_FOC_HFI_OBS_OVR_SEC 0.001
// HFI Samples
#define MCCONF_FOC_HFI_SAMPLES 1
// Buffer Notification Length
#define MCCONF_GPD_BUFFER_NOTIFY_LEFT 200
// Buffer Sampling Interpolation
#define MCCONF_GPD_BUFFER_INTERPOL 0
// Current Filter Constant
#define MCCONF_GPD_CURRENT_FILTER_CONST 0.1
// Current KP
#define MCCONF_GPD_CURRENT_KP 0.03
// Current KI
#define MCCONF_GPD_CURRENT_KI 50
// Speed PID Kp
#define MCCONF_S_PID_KP 0.004
// Speed PID Ki
#define MCCONF_S_PID_KI 0.004
// Speed PID Kd
#define MCCONF_S_PID_KD 0.0001
// Speed PID Kd Filer
#define MCCONF_S_PID_KD_FILTER 0.2
// Minimum ERPM
#define MCCONF_S_PID_MIN_RPM 900
// Allow Braking
#define MCCONF_S_PID_ALLOW_BRAKING 1
// Ramp eRPMs per second
#define MCCONF_S_PID_RAMP_ERPMS_S -1
// Position PID Kp
#define MCCONF_P_PID_KP 0.03
// Position PID Ki
#define MCCONF_P_PID_KI 0
// Position PID Kd
#define MCCONF_P_PID_KD 0.0004
// Position PID Kd Filer
#define MCCONF_P_PID_KD_FILTER 0.2
// Position Angle Division
#define MCCONF_P_PID_ANG_DIV 1
// Startup boost
#define MCCONF_CC_STARTUP_BOOST_DUTY 0.01
// Minimum Current
#define MCCONF_CC_MIN_CURRENT 0.05
// Current Controller Gain
#define MCCONF_CC_GAIN 0.0046
// Current Control Ramp Step Max
#define MCCONF_CC_RAMP_STEP 0.04
// Fault Stop Time
#define MCCONF_M_FAULT_STOP_TIME 500
// Duty Ramp Step Max
#define MCCONF_M_RAMP_STEP 0.02
// Current Backoff Gain
#define MCCONF_M_CURRENT_BACKOFF_GAIN 0.5
// ABI Encoder Counts
#define MCCONF_M_ENCODER_COUNTS 8192
// Sensor Port Mode
#define MCCONF_M_SENSOR_PORT_MODE 0
// Invert Motor Direction
#define MCCONF_M_INVERT_DIRECTION 0
// DRV8301 OC Mode
#define MCCONF_M_DRV8301_OC_MODE 0
// DRV8301 OC Adjustment
#define MCCONF_M_DRV8301_OC_ADJ 16
// Minimum Switching Frequency
#define MCCONF_M_BLDC_F_SW_MIN 3000
// Maximum Switching Frequency
#define MCCONF_M_BLDC_F_SW_MAX 35000
// Switching Frequency
#define MCCONF_M_DC_F_SW 25000
// Beta Value for Motor Thermistor
#define MCCONF_M_NTC_MOTOR_BETA 3380
// Auxiliary Output Mode
#define MCCONF_M_OUT_AUX_MODE 0
// Motor Temperature Sensor Type
#define MCCONF_M_MOTOR_TEMP_SENS_TYPE 0
// Coefficient for PTC Motor Thermistor
#define MCCONF_M_PTC_MOTOR_COEFF 0.61
// Hall Sensor Extra Samples
#define MCCONF_M_HALL_EXTRA_SAMPLES 1
// Motor Poles
#define MCCONF_SI_MOTOR_POLES 14
// Gear Ratio
#define MCCONF_SI_GEAR_RATIO 6
// Wheel Diameter
#define MCCONF_SI_WHEEL_DIAMETER 0.14
// Battery Type
#define MCCONF_SI_BATTERY_TYPE 0
// Battery Cells Series
#define MCCONF_SI_BATTERY_CELLS 12
// Battery Capacity
#define MCCONF_SI_BATTERY_AH 5
// BMS Type
#define MCCONF_BMS_TYPE 1
// Temperature Limit Start
#define MCCONF_BMS_T_LIMIT_START 45
// Temperature Limit End
#define MCCONF_BMS_T_LIMIT_END 65
// SOC Limit Start
#define MCCONF_BMS_SOC_LIMIT_START 0.05
// SOC Limit End
#define MCCONF_BMS_SOC_LIMIT_END 0
// MCCONF_DEFAULT_H_
#endif
app configuration header
// This file is autogenerated by VESC Tool
#ifndef APPCONF_DEFAULT_H_
#define APPCONF_DEFAULT_H_
// VESC ID
#define APPCONF_CONTROLLER_ID 58
// Timeout
#define APPCONF_TIMEOUT_MSEC 1000
// Timeout Brake Current
#define APPCONF_TIMEOUT_BRAKE_CURRENT 0
// Can Status Message Mode
#define APPCONF_SEND_CAN_STATUS 4
// Can Status Rate
#define APPCONF_SEND_CAN_STATUS_RATE_HZ 50
// CAN Baud Rate
#define APPCONF_CAN_BAUD_RATE 2
// Pairing Done
#define APPCONF_PAIRING_DONE 0
// Enable Permanent UART
#define APPCONF_PERMANENT_UART_ENABLED 1
// Shutdown Mode
#define APPCONF_SHUTDOWN_MODE 7
// CAN Mode
#define APPCONF_CAN_MODE 0
// UAVCAN ESC Index
#define APPCONF_UAVCAN_ESC_INDEX 0
// UAVCAN Raw Throttle Mode
#define APPCONF_UAVCAN_RAW_MODE 0
// APP to Use
#define APPCONF_APP_TO_USE 3
// Control Type
#define APPCONF_PPM_CTRL_TYPE 3
// PID Max ERPM
#define APPCONF_PPM_PID_MAX_ERPM 15000
// Input Deadband
#define APPCONF_PPM_HYST 0.15
// Pulselength Start
#define APPCONF_PPM_PULSE_START 1.072
// Pulselength End
#define APPCONF_PPM_PULSE_END 1.843
// Pulselength Center
#define APPCONF_PPM_PULSE_CENTER 1.456
// Median Filter
#define APPCONF_PPM_MEDIAN_FILTER 1
// Safe Start
#define APPCONF_PPM_SAFE_START 1
// Throttle Expo
#define APPCONF_PPM_THROTTLE_EXP 0
// Throttle Expo Brake
#define APPCONF_PPM_THROTTLE_EXP_BRAKE 0
// Throttle Expo Mode
#define APPCONF_PPM_THROTTLE_EXP_MODE 2
// Positive Ramping Time
#define APPCONF_PPM_RAMP_TIME_POS 0.4
// Negative Ramping Time
#define APPCONF_PPM_RAMP_TIME_NEG 0.2
// Multiple VESCs Over CAN
#define APPCONF_PPM_MULTI_ESC 1
// Traction Control
#define APPCONF_PPM_TC 0
// TC Max ERPM Difference
#define APPCONF_PPM_TC_MAX_DIFF 3000
// Max ERPM for direction switch
#define APPCONF_PPM_MAX_ERPM_FOR_DIR 4000
// Smart Reverse Max Duty Cycle
#define APPCONF_PPM_SMART_REV_MAX_DUTY 0.07
// Smart Reverse Ramp Time
#define APPCONF_PPM_SMART_REV_RAMP_TIME 3
// Control Type
#define APPCONF_ADC_CTRL_TYPE 0
// Input Deadband
#define APPCONF_ADC_HYST 0.15
// ADC1 Min Voltage
#define APPCONF_ADC_VOLTAGE_START 0.9
// ADC1 Max Voltage
#define APPCONF_ADC_VOLTAGE_END 3
// ADC1 Center Voltage
#define APPCONF_ADC_VOLTAGE_CENTER 2
// ADC2 Min Voltage
#define APPCONF_ADC_VOLTAGE2_START 0.9
// ADC2 Max Voltage
#define APPCONF_ADC_VOLTAGE2_END 3
// Use Filter
#define APPCONF_ADC_USE_FILTER 1
// Safe Start
#define APPCONF_ADC_SAFE_START 1
// Invert Cruise Control Button
#define APPCONF_ADC_CC_BUTTON_INVERTED 0
// Invert Reverse Button
#define APPCONF_ADC_REV_BUTTON_INVERTED 0
// Invert ADC1 Voltage
#define APPCONF_ADC_VOLTAGE_INVERTED 0
// Invert ADC2 Voltage
#define APPCONF_ADC_VOLTAGE2_INVERTED 0
// Throttle Expo
#define APPCONF_ADC_THROTTLE_EXP 0
// Throttle Expo Brake
#define APPCONF_ADC_THROTTLE_EXP_BRAKE 0
// Throttle Expo Mode
#define APPCONF_ADC_THROTTLE_EXP_MODE 2
// Positive Ramping Time
#define APPCONF_ADC_RAMP_TIME_POS 0.3
// Negative Ramping Time
#define APPCONF_ADC_RAMP_TIME_NEG 0.1
// Multiple VESCs Over CAN
#define APPCONF_ADC_MULTI_ESC 1
// Traction Control
#define APPCONF_ADC_TC 0
// TC Max ERPM Difference
#define APPCONF_ADC_TC_MAX_DIFF 3000
// Update Rate
#define APPCONF_ADC_UPDATE_RATE_HZ 500
// Baudrate
#define APPCONF_UART_BAUDRATE 115200
// Control Type
#define APPCONF_CHUK_CTRL_TYPE 1
// Input Deadband
#define APPCONF_CHUK_HYST 0.05
// Positive Ramping Time
#define APPCONF_CHUK_RAMP_TIME_POS 2
// Negative Ramping Time
#define APPCONF_CHUK_RAMP_TIME_NEG 0.2
// ERPM Per Second Cruise Control
#define APPCONF_STICK_ERPM_PER_S_IN_CC 3000
// Throttle Expo
#define APPCONF_CHUK_THROTTLE_EXP 0
// Throttle Expo Brake
#define APPCONF_CHUK_THROTTLE_EXP_BRAKE 0
// Throttle Expo Mode
#define APPCONF_CHUK_THROTTLE_EXP_MODE 2
// Multiple VESCs Over CAN
#define APPCONF_CHUK_MULTI_ESC 1
// Traction Control
#define APPCONF_CHUK_TC 0
// TC Max ERPM Difference
#define APPCONF_CHUK_TC_MAX_DIFF 3000
// Use Smart Reverse
#define APPCONF_CHUK_USE_SMART_REV 1
// Smart Reverse Max Duty Cycle
#define APPCONF_CHUK_SMART_REV_MAX_DUTY 0.15
// Smart Reverse Ramp Time
#define APPCONF_CHUK_SMART_REV_RAMP_TIME 3
// Speed
#define APPCONF_NRF_SPEED 1
// TX Power
#define APPCONF_NRF_POWER 3
// CRC
#define APPCONF_NRF_CRC 1
// Retry Delay
#define APPCONF_NRF_RETR_DELAY 0
// Retries
#define APPCONF_NRF_RETRIES 3
// Radio Channel
#define APPCONF_NRF_CHANNEL 76
// Address 0
#define APPCONF_NRF_ADDR_B0 198
// Address 1
#define APPCONF_NRF_ADDR_B1 199
// Address 2
#define APPCONF_NRF_ADDR_B2 0
// Send ACK
#define APPCONF_NRF_SEND_CRC_ACK 1
// P
#define APPCONF_BALANCE_KP 0
// I
#define APPCONF_BALANCE_KI 0
// D
#define APPCONF_BALANCE_KD 0
// Loop Hertz
#define APPCONF_BALANCE_HERTZ 1000
// Pitch Axis Fault Cutoff
#define APPCONF_BALANCE_FAULT_PITCH 20
// Roll Axis Fault Cutoff
#define APPCONF_BALANCE_FAULT_ROLL 45
// Duty Cycle Fault Cutoff
#define APPCONF_BALANCE_FAULT_DUTY 0.9
// ADC1 Switch Voltage
#define APPCONF_BALANCE_FAULT_ADC1 0
// ADC2 Switch Voltage
#define APPCONF_BALANCE_FAULT_ADC2 0
// Pitch Fault Delay
#define APPCONF_BALANCE_FAULT_DELAY_PITCH 0
// Roll Fault Delay
#define APPCONF_BALANCE_FAULT_DELAY_ROLL 0
// Duty Fault Delay
#define APPCONF_BALANCE_FAULT_DELAY_DUTY 0
// Half Switch Fault Delay
#define APPCONF_BALANCE_FAULT_DELAY_SWITCH_HALF 0
// Full Switch Fault Delay
#define APPCONF_BALANCE_FAULT_DELAY_SWITCH_FULL 0
// ADC Half State Fault ERPM
#define APPCONF_BALANCE_FAULT_ADC_HALF_ERPM 1000
// Tiltback Angle
#define APPCONF_BALANCE_TILTBACK_ANGLE 15
// Tiltback Speed
#define APPCONF_BALANCE_TILTBACK_SPEED 5
// Duty Cycle Tiltback
#define APPCONF_BALANCE_TILTBACK_DUTY 0.75
// High Voltage Tiltback
#define APPCONF_BALANCE_TILTBACK_HIGH_V 200
// Low Voltage Tiltback
#define APPCONF_BALANCE_TILTBACK_LOW_V 0
// Constant Tiltback
#define APPCONF_BALANCE_TILTBACK_CONSTANT 0
// Constant Tiltback ERPM
#define APPCONF_BALANCE_TILTBACK_CONSTANT_ERPM 500
// Startup Pitch Axis Angle Tolerance
#define APPCONF_BALANCE_STARTUP_PITCH_TOLERANCE 20
// Startup Roll Axis Angle Tolerance
#define APPCONF_BALANCE_STARTUP_ROLL_TOLERANCE 8
// Startup Centering Speed
#define APPCONF_BALANCE_STARTUP_SPEED 30
// Deadzone
#define APPCONF_BALANCE_DEADZONE 0
// Current Boost
#define APPCONF_BALANCE_CURRENT_BOOST 0
// Multiple VESCs Over CAN
#define APPCONF_BALANCE_MULTI_ESC 0
// Yaw P
#define APPCONF_BALANCE_YAW_KP 0
// Yaw I
#define APPCONF_BALANCE_YAW_KI 0
// Yaw D
#define APPCONF_BALANCE_YAW_KD 0
// Roll Steer KP
#define APPCONF_BALANCE_ROLL_STEER_KP 0
// Roll Steer ERPM KP
#define APPCONF_BALANCE_ROLL_STEER_ERPM_KP 0
// Brake Current
#define APPCONF_BALANCE_BRAKE_CURRENT 0
// Yaw Current Clamp
#define APPCONF_BALANCE_YAW_CURRENT_CLAMP 0
// Setpoint Pitch Low Pass Filter
#define APPCONF_BALANCE_SETPOINT_PITCH_FILTER 0
// Setpoint Target Low Pass Filter
#define APPCONF_BALANCE_SETPOINT_TARGET_FILTER 1
// Setpoint Filter Clamp
#define APPCONF_BALANCE_SETPOINT_FILTER_CLAMP 8
// D term PT1 Filter
#define APPCONF_BALANCE_KD_PT1_FREQUENCY 0
// Control Type
#define APPCONF_PAS_CTRL_TYPE 0
// Sensor Type
#define APPCONF_PAS_SENSOR_TYPE 0
// PAS Max Current
#define APPCONF_PAS_CURRENT_SCALING 0.1
// Pedal RPM Start
#define APPCONF_PAS_PEDAL_RPM_START 10
// Pedal RPM End
#define APPCONF_PAS_PEDAL_RPM_END 180
// Invert Pedal Direction
#define APPCONF_PAS_INVERT_PEDAL_DIRECTION 0
// Sensor Magnets
#define APPCONF_PAS_MAGNETS 24
// Use Filter
#define APPCONF_PAS_USE_FILTER 1
// Positive Ramping Time
#define APPCONF_PAS_RAMP_TIME_POS 0.6
// Negative Ramping Time
#define APPCONF_PAS_RAMP_TIME_NEG 0.3
// Update Rate
#define APPCONF_PAS_UPDATE_RATE_HZ 500
// IMU Type
#define APPCONF_IMU_TYPE 1
// IMU AHRS Mode
#define APPCONF_IMU_AHRS_MODE 0
// Sample Rate
#define APPCONF_IMU_SAMPLE_RATE_HZ 200
// Accelerometer Confidence Decay
#define APPCONF_IMU_ACCEL_CONFIDENCE_DECAY 1
// Mahony KP
#define APPCONF_IMU_MAHONY_KP 0.3
// Mahony KI
#define APPCONF_IMU_MAHONY_KI 0
// Madgwick Beta
#define APPCONF_IMU_MADGWICK_BETA 0.1
// Imu Rotation Roll
#define APPCONF_IMU_ROT_ROLL 0
// Imu Rotation Pitch
#define APPCONF_IMU_ROT_PITCH 0
// Imu Rotation Yaw
#define APPCONF_IMU_ROT_YAW 0
// Accel Offset X
#define APPCONF_IMU_A_OFFSET_0 0
// Accel Offset Y
#define APPCONF_IMU_A_OFFSET_1 0
// Accel Offset Z
#define APPCONF_IMU_A_OFFSET_2 0
// Gyro Offset X
#define APPCONF_IMU_G_OFFSET_0 0
// Gyro Offset Y
#define APPCONF_IMU_G_OFFSET_1 0
// Gyro Offset Z
#define APPCONF_IMU_G_OFFSET_2 0
// Gyro Offset Comp X
#define APPCONF_IMU_G_OFFSET_COMP_FACT_0 0
// Gyro Offset Comp Y
#define APPCONF_IMU_G_OFFSET_COMP_FACT_1 0
// Gyro Offset Comp Z
#define APPCONF_IMU_G_OFFSET_COMP_FACT_2 0
// Gyro Offset Comp Clamp
#define APPCONF_IMU_G_OFFSET_COMP_CLAMP 5
// APPCONF_DEFAULT_H_
#endif