Having searching ultimate motors and ESC setups I always come to widely used skateboard motor setups, which become common and low price.
There are also very cheap and nice setups having motors within a wheel being installed on fixed shaft. They are commonly couple of motors and ESC is also supporting two motors inherently:
Before brushless motor came up such setups where very complicated and costly to build but now with motors are installed iwthin the prop having single fixed shaft, might be very efficient setup, reducing current by at least twice for each motor (30-40A) and improve the efficiency (I hope)
I will be happy, guys, to see your comments and thoughts keeping two contra-rotating props, with smaller diameter (80-90) in the same duct having two waterproofed outrunner motors, whithin the prop.
Actually I meant a bit another type of motor sitting on fixed shaft, like here:
In that case both installed on the same shaft and turning in opposite directions. Keeping in mind water direct cooling it might be overpowered bringing 2000-2500wt of total power (indeed in theory )
It won’t be easy to make the axles/shaft.
But It may have better efficiency.
Here are some contra rotative brushless, the 260 kv should work : http://www.maxxprod.com/mpi/mpi-266.html
Contra rotating props do a lot to the efficiency of your board! Most solarboats use setups like this. The main problem is that it takes a bit more from your gearbox. If we’re abled to create something which solves this problem it’s a Innovation! thanks
My motivation is to have direct dive with no gearbox in any case. Contra-rotating props might solve the minimal power requirement (I beleive it is about 2500 wt at least), so each motor has to provide 1000-1200wt of power
How would the setup look like. You got your fuselage and at the end an outrunner mounted with CL-rotation. Now how will you attach the second outrunner ? The problem is, that the shaft is rotating too. One side of the first outrunner is fixed (at the fuselage) and the whole other side is rotating, so it is not possible to attach another outrunner behind the first one (except you have a hollow shaft inside the first outrunner).
But I also had a similar idea. If you got problems to deliver the power one motor draws, why not use 2 inrunners at the same shaft(there are some with a dual shaft, or maybe just ask for an extended shaft on both sides). Sure you also need 2 ESCs then, but then you only draw half the amps on each ESC (if you got the right timing, so maybe you need a sensor for start up).
Okay, there might be another possibility, one motor in front of the fuselage and one at the rear, so you could also split the power…
cool
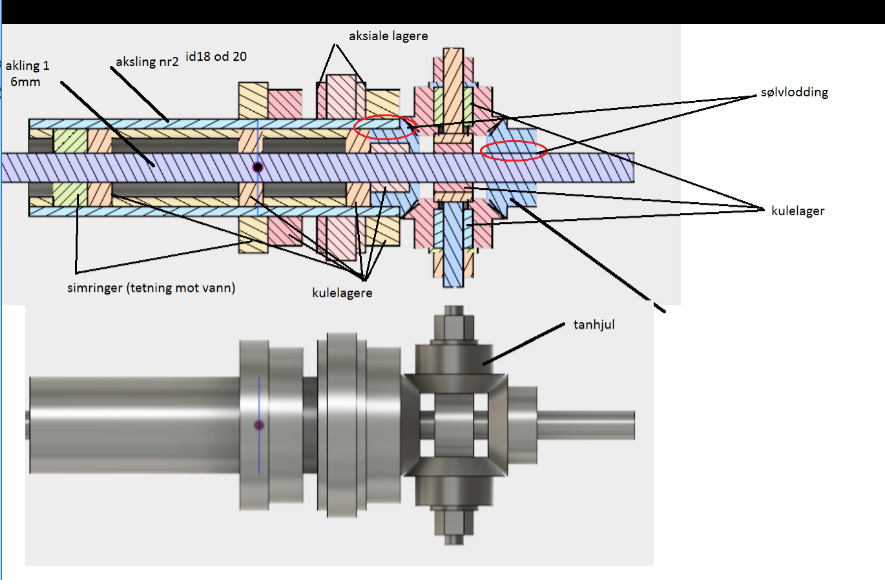
Actually, printed a prototype of contrarotating props, will see if I can find the pictures and post soon. , not yet made, but I have the drawings and parts needed, bearing gears, etc… But need to make some parts of steel and aluminum to make it work. 3D printed parts will never last:P
it uses the gears shown, and two seals on each contrarotating axle, same gearbox system used on small torpedoes. I have a more complete model with all the bearing, seal, gear, details, it adds about 70mm to the propulsion unit. Can be made smaller.
Only found this video on my quick search, had to uploaded it to YouTube to make it work.
Also found this quick and dirty sketch, ps it is written in Norwegian:P
Thats the point. Shafts are not moving (as in the skateboard wheel motors). Both motors sit on a single shaft (cables is a bit complicated, since it should go inside of the shaft). But both motors are sharing the same shaft which is mounted on the mast above the wings rod. the motors structure is exactly the same is it is done on skateboard wheel (probably even the same motor but has to be rewind to make it more powerful, since most powerful is 500wt)
Exactly! What was your experience with that? Do you think it makes sense to try another prop (bigger or different shape?). It will be very valuable to measure thrust/volts/amps to see how this setup performs in terms of efficiency. As far as I saw in your youtube it was very under powered for our purpose but such motors might be improved by rewiring or choosing longer (in length) and therefore more powerful motor. What do you think?
Yes I was under powered with my 6354 60KV 2450W outrunner. But I think it’s worth to continue exploring with bigger or multiple motors. There are other discussions ongoing here about potting/sealing outrunners for that purpose.
Just was watching the youtube trying this setup again and again - are you sure it was under powered or the prop was just too small in terms of size? Was it a big difference of sound in the water and out? To get the feeling of rpm difference?
I wish I had better data on this test. It felt like RPM was a lot slower under water. However my amp meter only showed 20amps at full throttle in the water. Leads me to believe that there is room for improvement with different props. And then there is the salt water which may have shorted some windings if there were little cracks in the copper insulation of the stator windings. That could explain reduction in power too. Lot’s of variables
20amp means about 600-709wt of power. Strange… Probably the motor is not capable to deliver more power with this voltage. Would it be interesting to provide higher voltage?


 loading…
loading…
