Hey guys, I saw that the drive system and especially the motor is still a bit a problem.
Therefore I tried to find the easiest way to get a strong and powerful motor for low cost and easy integration.
My recent builds are shown here Peters Build.
In the meantime I worked with internally watercooled direct drive inrunners (good results) and with direct drive inrunners (best results).
What came out I want to show here.
6 Likes
Peter, please show us what you have with a focus on the torque in Nm as the figures provided by Reacher Tech ++ might +++ be too optimistic. In fact we don’t know yet.
What would be the price of both water-cooled and airc-cooled unit ?
| Reacher Tech | D65L150-100 | D65L150-80 |
|---|---|---|
| Max Torque | 115kg*cm | 120kg*cm |
| Max Torque (N*m) | 11,5 | 12 |
Awsome Peter!
Looking forward to see your findings!
I finally landed at this motor design:
Stator:

Rotor blank:

First testrig of the motor was this:


Power Chart @100A:

Power Chart @80A:

Torque chart over current:
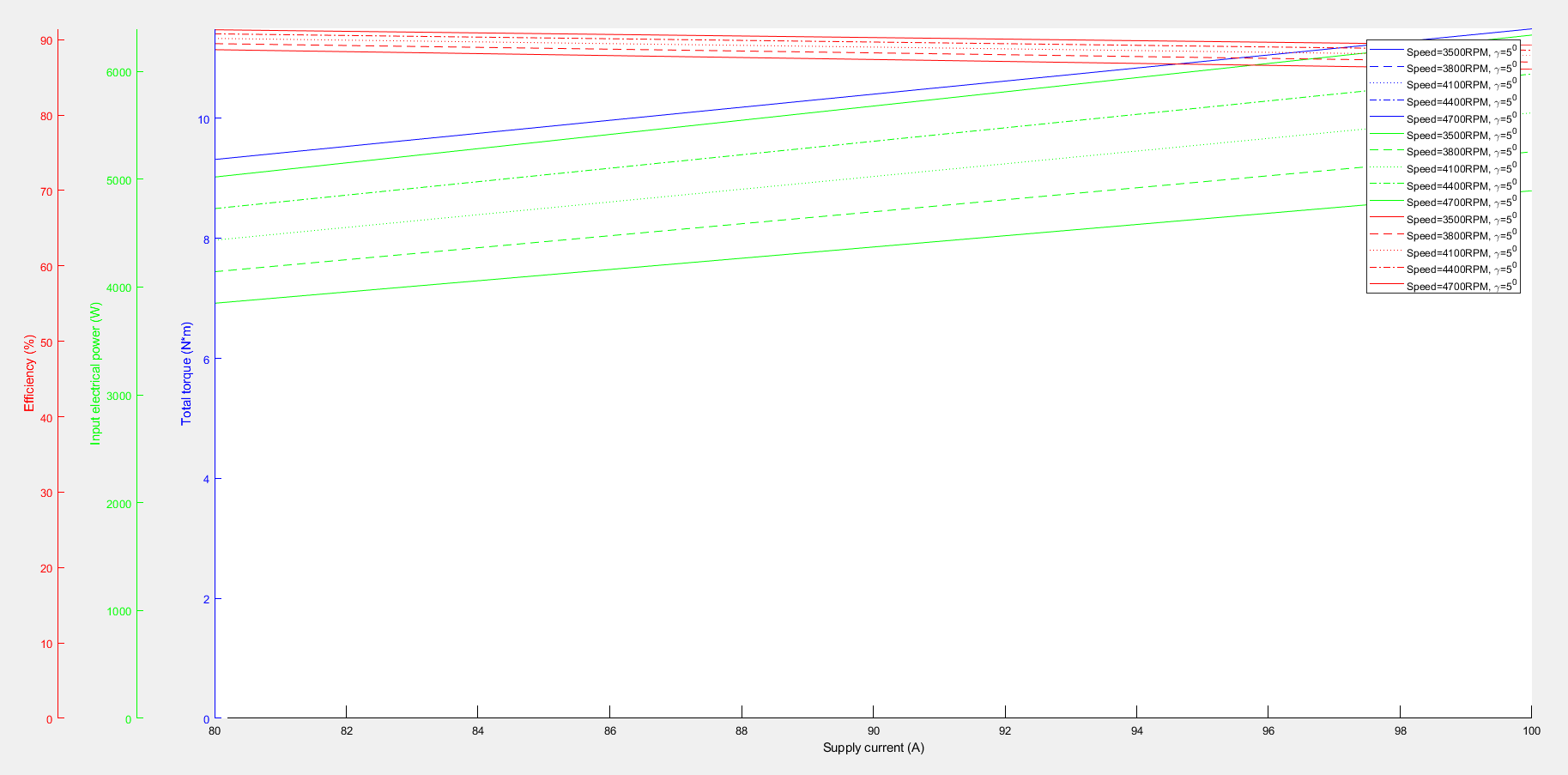
RPM is either ~4500 like you see above or ~5500 with another winding pattern.
Dimensions of the motor are leaned on the 80100 outrunner, in fact with the housing I reached an outer dia of 80 and a total length of ~120mm. The motor core is much smaller. The total motor weight is below 2kg.
The materials are capable to withstand more than 150°C and the windings are higher class quality (This one class H 200°C, but 180°C might be sufficient). The bearings are designed to withstands 500N of thrust for 8000h and plenty of axial force. A temperature sensor is integrated to have maximum safety and avoid overheating.
The tests reflected the simulation data and therefore I went on to find an easy way for integration, what I found was a motor in mast configuration:
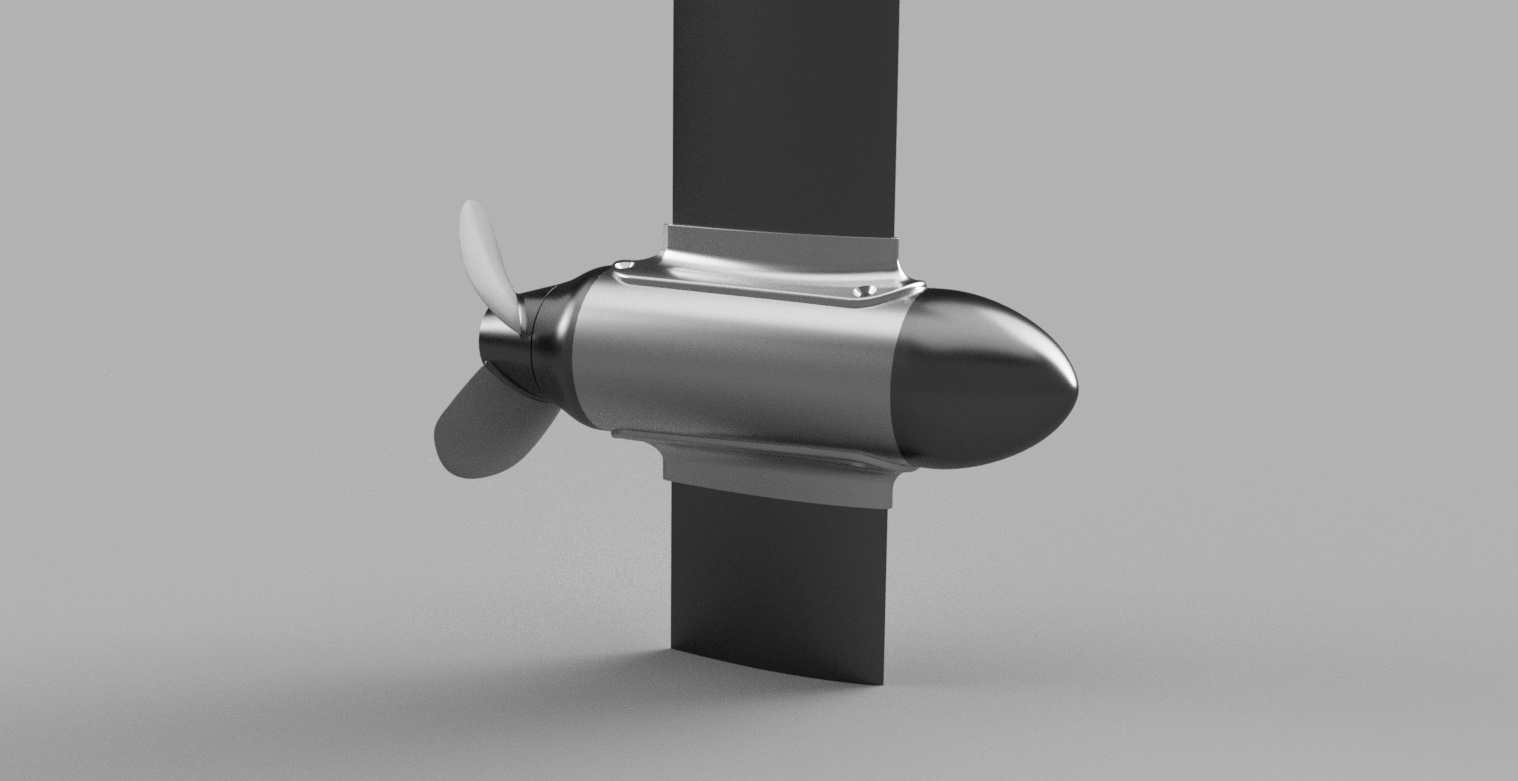
This is designed for the Slingshot foils. You simply cut the mast in two pieces and use the screwing holes (threaded) to reattach everything. The first proto is currently under production. The center parts later are mainly aluminium, anodized, front cap and back guide are 3D printed. The back part can also carry a duct, so everyone can customize the pod without fearing sealing problems:
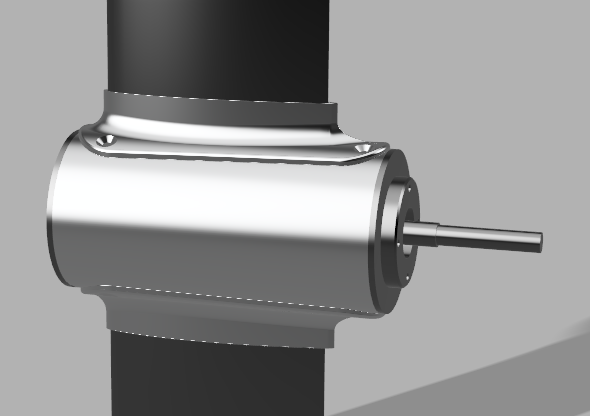
The controller is a Vesc six (Trampa based), directly mounted on the mast base plate. The electronics are covered with a milled and sealed cap. The remote receiver can there also be placed. So only two wires will run to the battery compartement. The motor is protected by the temperature controller (But up to now, I was far away from that). The big advantage is that the Vesc has full control capabilty and when the proper cooling is achievable, it can supply plenty of power.
The propeller is custom designed, but the motor has enough torque so that it can also handle larger props.
I really tried to find a strong and robust design, which is simple on the other hand, as I’m always a little afraid of these chinese super fancy facts motors… 
Within the coming days/weeks I can show some further data, like test results and pics of the realized design.
Finally, what do you guys think about this? Do you prefer a “clamp on” or a “motor in mast” design?
Target price for the motor pod is in the range of 350-500$.
If some of you are interested, I would detail the motor in either direction, get a final quote (hopefully cheaper than target) for that and reproduce them?
Just let me know what you think and what you would prefer 
15 Likes
Damn Pete, i thougth u gonna get back with some stylish efficient wing but this is even better 
Torque seems impressive from 80ish mm inrunner! U did some temperature “stress” testing of the motor pod? Vesc cooling is passve throughout the mast and is dissipating alright? I will definitey be interested in motor as soon as i burn down current project and get back to board building (again)! Well done!
Very well done and design , the motor housing will be strong enough to hold the mast/wing… ? ( screws taped on 2-3mm housing ?)
The bolts are directly connected internally, so no forces will act on the thin housing.
1 Like
Hey Peter,
I am also interested in your motor design. The data you published above , those values are they calculated or tested?
The in-mast design looks nice but I am not sure about the static with this design. Also I don’t see a big advantage compared to the clamp design.
What’s is you plan for the next future? If, when could it be available ?
Can you explain why you took the 80100 as a reference and not one of the 56xxx motors?
Apart from that I really like your design and especially your testing results 
@Giga I took it, because it seems to be the maximum size that is widely accepted, still reasonable from drag point of view and because diameter is nearly everything for a motor in that size category. In my opinion a 56mm inrunner in direct drive would have to be extreeeeeeeeeemely long and expensive for production.
@MAJA-Board Thanks for the feedback! The values are simulated. The validation is currently taking place or took already place. Up to now the results are reflecting the simulation.
Regarding the Motor in Mast, I thought that the duct can directly be mounted on the mast and the cables can run dry up to the controller, which avoids further potting or sealing.
Up to now, I plan to finish the validation and when it’s succesful, I will go ahead depending on the feedback.
@Just Stress testing is ongoing with continous full throttle at no board speed, towing somebody, and all the silly things I can imagine with it. More results of that will follow!
With the Vesc it seems to have a good balance of power between motor and esc, as the limit is quite on the sweet spot of the motor. Further the motor has thermal protection, so when you reach the temperature limit, the controller will regulate the amps.
5 Likes
First of all: Great Design and I appreciate that you are taking your time to develop and test everything.
Simulating, testing an comparing the data really makes it much more trustworthy than all the information given on AliExpress, etc…
Just a couple of questions:
Where exactly do you plan on placing the temperature sensor?
How do you „seal“ the inside against water?
Do you just use closed bearings ?
Again, if this motor works , I see quite the potential for this to sell well. I’m looking forward to the test results.
Great design @Peter, however I think there are obvious strength benefits leaving the mast intact and instead using a mast clamp. I have one where the motor rises out of the water that i am going to be using for downwind foil surfing.
I’d be very interested to see whether you could translate that design into a motor with 65mm diameter and around 150mm length. This is the size lift and FR are using so in terms of fluid dynamics its very well tested in the real world at greater speeds than the 80mm outrunner.
Have you built the motor yourself or have you just approached a company and had one custom made?
@Jasey thanks The temperature sensor is placed on the outer winding section, where the cooling is worse. The limit temperature set on the VESC nevertheless has to be lower than the first material degradation temperature (safety factor), because you usually don’t find the real hot spot.
The sealing will take place with lip seals, O-rings and special sealing adhesive depending on the interface. The bearings don’t need to be closed, as no water can migrate to the spot.
@Jezza you are right, if you might go this way, it has to be tested carefully. From mechanical strength calculation point of view though it should be no problem when you choose a proper layout for the interface. For the DIY scene it would have the opportunity that you have a strong and rigid connection to the motor. At a 3D printed clamp you would always have to fear if it holds the forces over time…
I don’t think that lift has 65mm outer dia, and FR as well, take a closer look.
Effect of a small dia is you need a smaller prop --> lower total efficiency, and the motor current increased to an unpleasant level, so that you will not be able to run it with a Vesc six, which is limited by current.
2 Likes
Ah, forgot to add. Up to now the whole setup is made by myself. Reproduction will have to show up
1 Like
I have measured these up from multiple scaled pictures (with known mast sizes) and from that they size in at between 65 - 70mm for FR and 65mm for lift. Based on the fact that FR has lift foils as well at his disposal, I’m pretty sure the motor is built off the Lift design and possibly even the same manufacturer. I think there is actually some form of partnership between them now as I have seen pictures of FR motor units in the Lift factory. I do have sources that will be able to provide the exact measurements of both motor units in time.
2 Likes
Why dont you open the motor and let the water run through it to cool it?
I like your design, it is different from others, has a larger stator, flatter winding producing more torque if you apply high current density and have good cooling. But you also need a large back iron (ring) to make the motor efficient or do you use halbach array inside your rotor? What kind of motor is this? The longer i look a it, the more questions i have.
Not sure for the motors (yet) but for the wings it is obvious they have a partnership:
Comparing http://flyingrodeoefoil.com/wings/
and https://store.liftfoils.com/collections/parts-components/products/standard-one-piece
FR references__: 110 150 170_____200 at 615 655 700____745 EUR
LIFT references : 110 150 170 170s 200 at 695 745 795 795 845 USD
plus you have ++ exactly++ the same price list 845USD = 745.71€ (1 USD = 0.8861EUR on March 05, 2019)
References: identical, prices: identical, plane footprint : identical
As FR cannot sell branded LIFT planes (not yet), they have to offer a mast adapter to existing mast brands if they want to sell planes.
Conclusion: FR is selling rebranded Lift planes… with a free adaptor.
1 Like
Congratulations! Great work
Interested? Hell yes!
This motor looks really nice!
Where did you get the rotor-magnets? Is it possible to buy stator and rotor in this size?
I was first thinking of getting the 65150 -80KV but the more I talked to the supplier the more skeptical I got. So I started to thinking if it was possible to build a big inrunner that would work for our purpose. After all this is as DIY build.
It seems like this forum is full of people with great knowledge in BLDC motors and how to modify them.
Interested? Yes indeed!
1 Like