Sorry if not clear, I mean the remote battery.
I use the remote on the tow boat that I also ride as a boat with family, with rides at trolling speeds that can last 3-4h. Just a way to have the info without restarting the remote. Also cruise control would be nice for this use.
I had a servo failure on the tow, and having a feedback on the remote could help diagnose immediately what could be wrong with the boat and react quick. If you have signal, and the remote feedbacks throttle/steering signal being transmitted, you can rule out remote inputs failure. Same idea for throttle.
The boat was far and into a channel with other boats, I could not see if the steering had any effect.
I think adding all this will make the display too cluttered but I will try
Anyways maybe some information/tips that also help:
Internal battery lasts 40-60h on one charge. So as long as you start with more than 3.7V you should be good even for 4-5h rides
To debug inputs, if you have locking or gears enabled: If you apply throttle you should not be able to switch gears. If you can’t, throttle is read correctly. If you don’t apply throttle and can switch gears the steering still works correctly.
Backwards compatibility if you did not fill the remote with potting material or keen enough to Dremel and pick out parts of it again… otherwise new TX with the GPS included is needed. Rx is fully compatible
I2C gyro can be connected to the bus thats already there
In fact V1 remote had acc/gyro onboard. Was never used so I removed it on V2
According to a friend working for a big efoil company most prop injuries come from feet below board and throttle engaged btw, not falling and getting close to prop.
In a foil assist situation, with the motor close to the board, it seems possible, but pretty hard to do.
The few problematic situations I had, were when I was falling and still holding the trigger or more frequently, when I was falling and the trigger was activated by water pressure.
I will see if I can figure out something this winter.
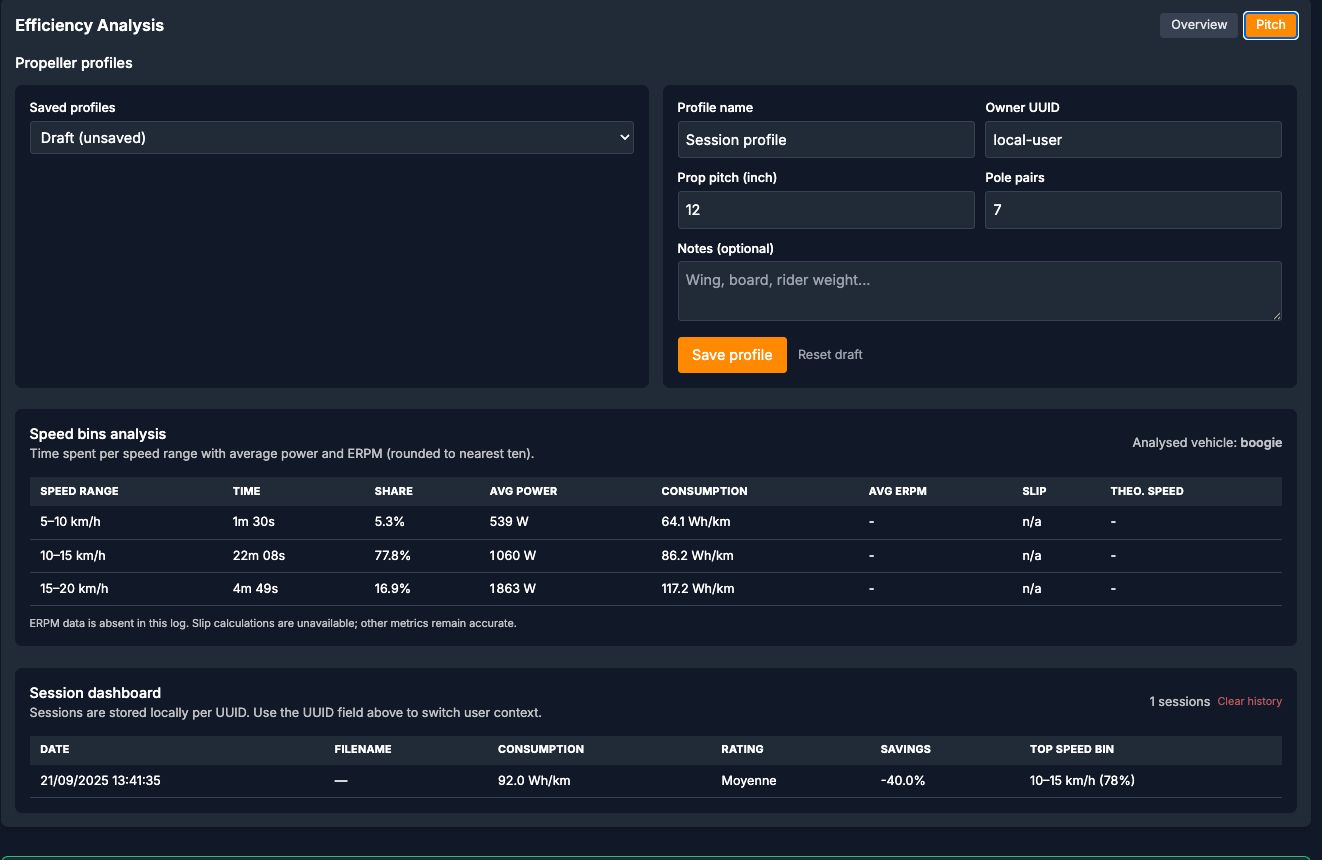
Since we are doing a custom log analyzer, we had the idea to include the following feature:
“Bin” the driven speed in several sections (10-15kmh, 15-20, 20-25,…) so the user can analyze in which “speed regime” they travel most efficient and if there is an unexpected step somewhere.
Current status looks like this:
What exactly do you mean by battery draw? The consumed Wh, added up, per bin?
2nd VESC would be possible through CAN-bus I believe… but then again for most use cases I would assume both VESCs will see the same load or at least close enough that the statistics would not differ…?
You can see current from battery and current to motor in the “normal” overview/graphs, like in all common log viewers (metr/voyage/…). Do you need them per speed-bin as well? I personally don’t see the benefit there, the main purpose of that speed-bin view is to get an indication about efficiency vs speed.
Ok, also that would mainly be needed in the graph view, not the speed-bin view I guess… At the moment BREmote V2 only communicates with one VESC via UART… I will put 2 vesc readout on the to-do list. Until then I know for sure VESC Express (can buy that off AliExpress for 9 Euro) can log multiple VESCs at the same time. Althoug I find the usage of VESC Express rather finnicky and furstrating at times…
I also have recently included a feature, that will make measurement of remaining battery % (SOC) very accurate. To use this you have to configure the exact battery type (manufacturer and model).
I will prepare the most common cells for everyone to use.
For that I would be happy if you could respond with a few cell types that you think are most common in eFoil and boogie at the moment?