I can only find data for Samsung 50E, not 50S
I need the discharge curve ![]()
The above 50S seems to be a 50S2
The 50S2 can be identified by a “2” in the lower left corner of the printing on the wrap. If it’s not there then it’s the original 50S.
For the discharge curve, you have MOOCH:
1 Like
Thanks, added to LUT
1 Like
… and the discharge curve of many other popular cells.
I didn’t realise what LUT was until I watched you explanation video in the “BREmote V2 - Open Source Remote” thread… what a useful and nicely built feature !
Love the nano remote concept! very cool form factor! Great to see some more fun ideas getting put into reality!
1 Like
Hello ludwig, working on my own version of follow mode, looks like I have a working concept (made a small 3 wheel robot for testing on land). Added compass to improve accuracy. Was wondering what logic you plan to use for using follow mode with only trigger and toggle. Ideally I would enable follow mode and tow boogie would follow at 20m distance or so and not come closer. Then when I need I would override follow control and drive it manually to me and for waterstart. An extra button would solve this easily ![]() what strategies are you considering?
what strategies are you considering?
4 Likes
Oh this sounds really cool!
I was considering:
Check for: Both foiler and boogie at standstill and throttle released: Enter “manual drive mode”
In this mode once trigger is pressed it behaves like now, completely manual steering, allowing you to come close to yourself and grab the leash
Then you start driving and pulling the foiler out, after that you let the boogie “fall behind”
This can be detected: Foiler at speed, biggie at speed and in a angle range ±30° behind the foiler: enter auto mode
In this mode Foiler holds trigger pressed all the way, it will come close only to 20m and then hold this distance and try to stay right behind or at a set angle behind, depending
Another mode is “follow later” where the GPS track of foiler is recorded and the boogie will later follow those waypoints, this way in areas with lots of obstacles it won’t hit them when it tries to go to the foiler
@macfly1202 has a very far developed version as well but is lacking time recently to finish and test the last bits, he also added compass on the boogie side. I will ask him, but I think I can share the code with you so maybe you can copy/get inspired by some of the things
Would be nice if you could use the same conf struct and the same user interface button to enable/disable follow me (both are already in the current GigHub version of my “original” code btw)
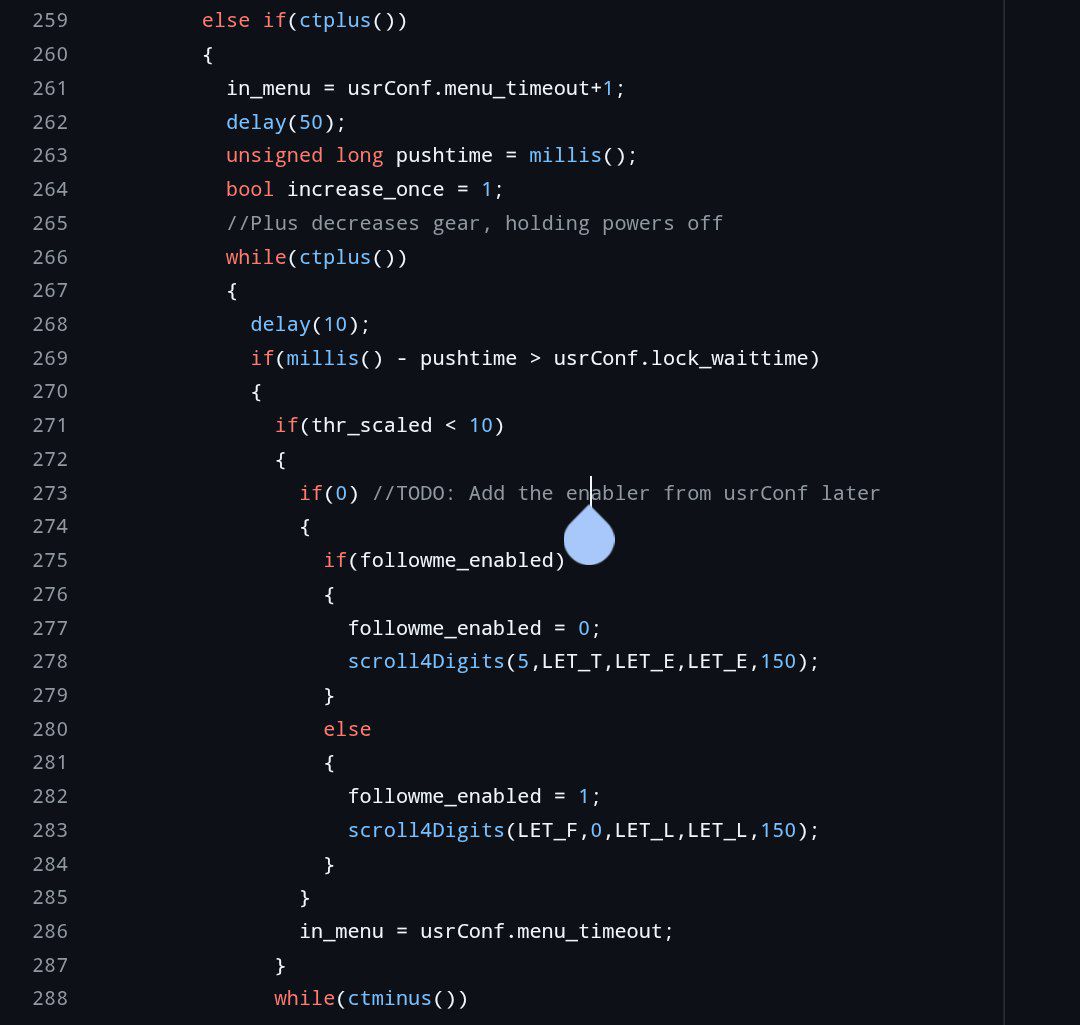
Check line 273 in Hall.ino for the enabling function
Just need to enable the if(0) function and then you can use the followme-enabled variable
2 Likes
This is a really nice feature
Thanks for sharing Ludwig. It’s winter here so testing on water will have to wait a bit unfortunately ![]() Waypoint routing sounds interesting, would be super cool to be able to draw route on the phone screen to follow
Waypoint routing sounds interesting, would be super cool to be able to draw route on the phone screen to follow ![]() or add operating/avoid zones. Great idea actually.
or add operating/avoid zones. Great idea actually.
I’m not that agile in programing but can cover basics. Discovered AI “enhanced” or replaced coding and am often speechless on it’s capabilities.
Anyway, I have not implemented SPIFFS existing variables for follow mode, but that’s few clicks away.
For now for testing with small wheeled boogie I went for this logic :
Hold trigger on turn on, follow mode enabled, classic mode otherwise.
Foiler speed >5kmh, follow mode when throttle pressed (max throttle proportional to trigger input), 100% throttle (settable max for follow mode) to distance over 10m. 10-5m down to max 50 % throttle, stop under 5m.
So it would follow with min 5m distance.
If foiler speed under 5kmh
follow mode to 10m, 50% to 5m.
Under 5m full manual mode, needs trigger to be relased to go to manual mode, safety so boogie will not go full throttle when comes to 5m radius.
Manual mode will latch and follow mode will be active again when distance is >8m.
All distances and speeds are settable only in code for now, spiffs would be nice to implement for easy adjustment.
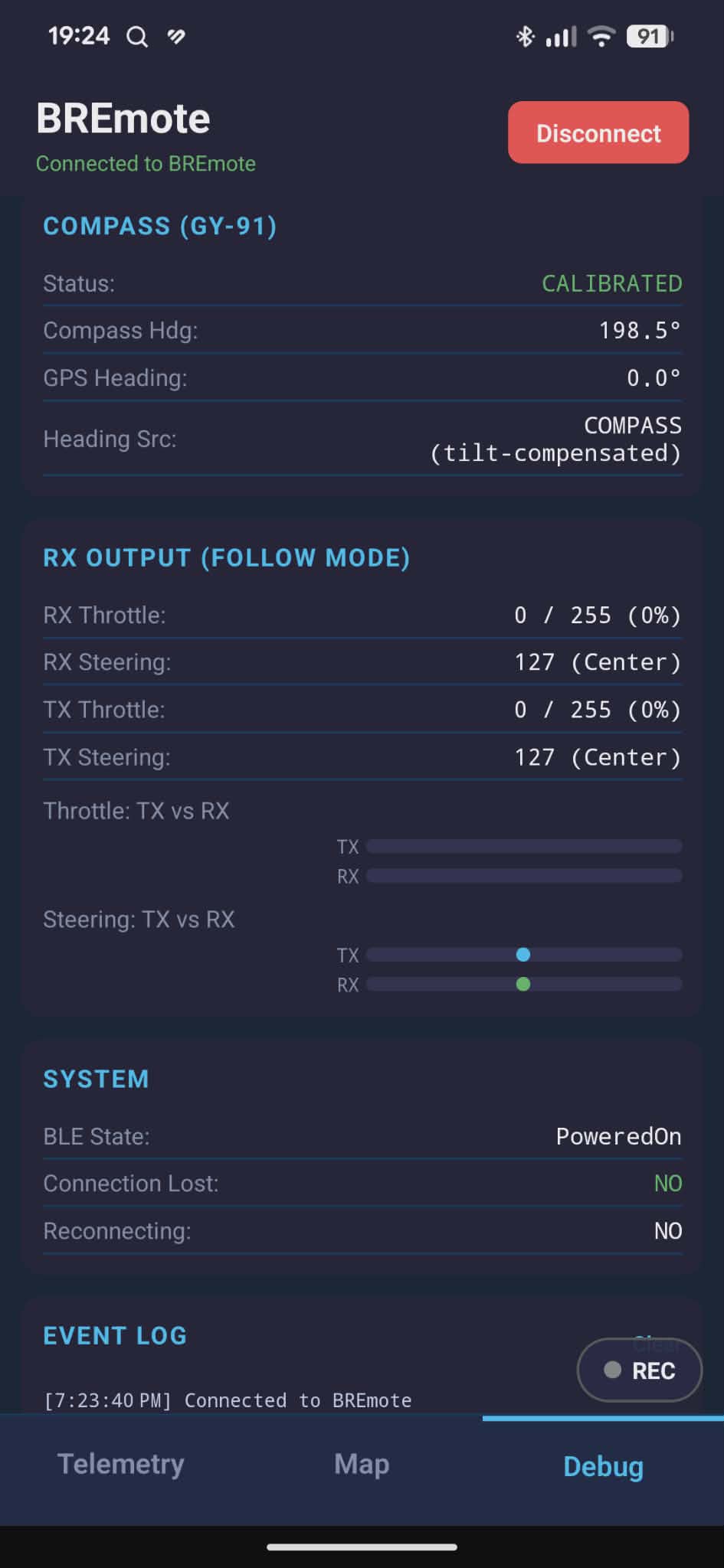
Also using vibration motor, will vibrate if gps or radio signal is lost, so rider will now if there is a problem with following.
Stop motors if boogie has has flipped (based on imu)
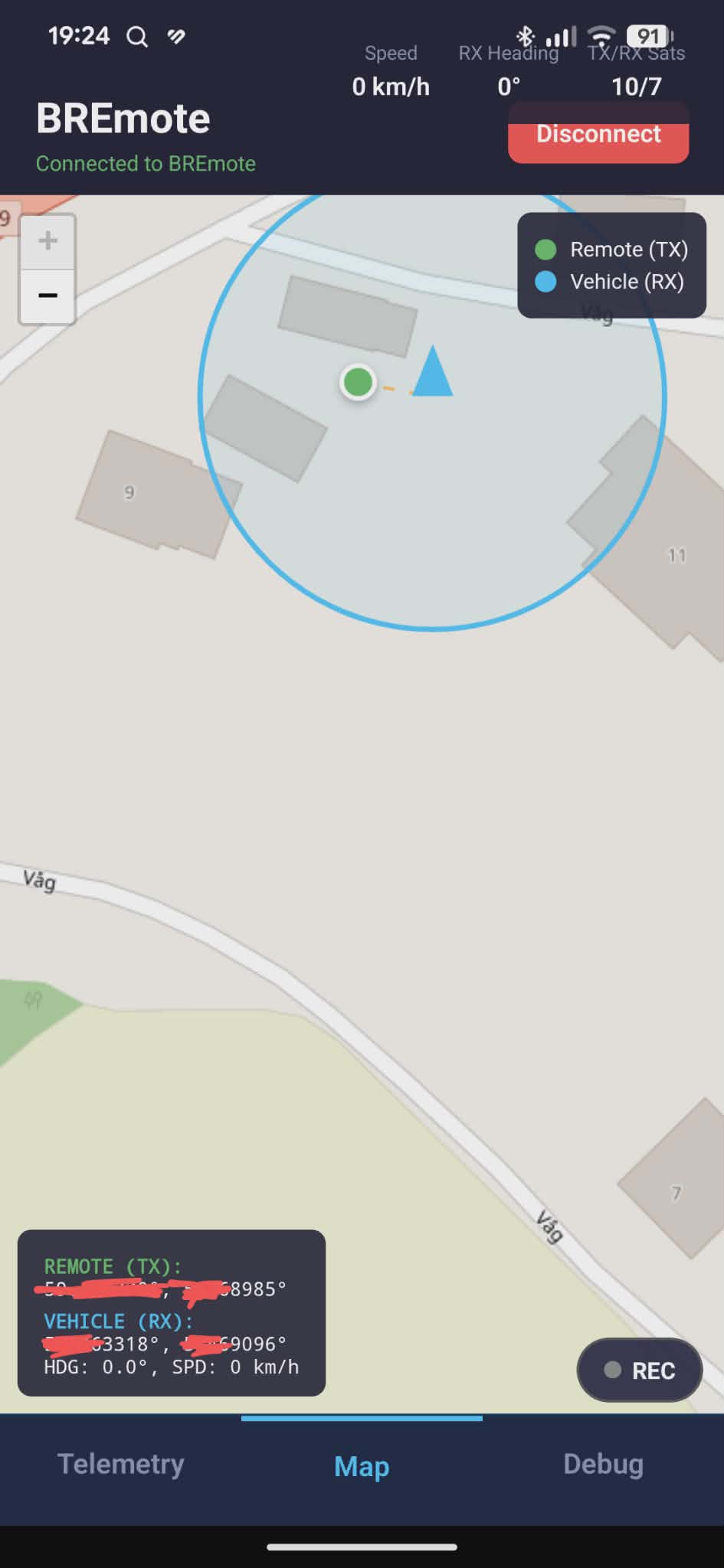
Also Bluetooth is enabled now and there is an app for debug (for now) and datalogging.
Before all this I have replaced dot led screen with 128x64 oled screen, not tested on water yet.
Will add some pics for inspiration ![]()
2 Likes




Also possible but be careful because trigger+steering at startup is either format config or switch to BT mode (planned, not implemented)
Also I think switching follow me without turning remote on and off is nicer ![]()
Looks very nice what you got there for sure!
5m I think is too low, a short GPS glitch at a bad time and the boogie will ram the foiler
Let’s say the foiler falls and therefore stops right when the GPS glitches (because the remote is under water)
Need enough distance to allow maybe 1 GPS glitch and safely stop (runout of the boogies inertia after cutting throttle) and not run over the foiler
But that is details, since you can set all of this in your code anyway
Good point, maybe disable that or add confirmation before format if not already implemented.
If/when BREmote v3 is coming it should have one or 2 extra buttons for extra functionality ![]()
All speed and distance settings are now set for testing with small wheeled boogie, it has max speed of 5kmh. I agree 20-30m would be used on water. GPS looks to have some deviation and glitching .
Debugging on water would be much harder than on land.
4 Likes
Hello @ludwig_bre ,
Just a query about GPS follow me. I know that there were some delays with winter and getting lots of test data but wondered if it is still in the pipeline and if you have a rough timescale? Happy to keep waiting and certainly not pushing. Just a keen Bremote user who is looking forward to what might be next.
Thanks,
James
3 Likes
X2 patiently waiting for following me GPS
Hey
Since I am not the one developing the follow mode, we will have to ask the developer @macfly1202 ![]()
1 Like
Thanks Ludwig. I hadn’t realised you were not developing it.
@macfly1202 thanks a lot for developing the gps follow me. How is the progress going?
1 Like