I have been thinking about how to improve the ergonomics in a foil assist situation.
Especially on small boards it is pretty awkward to control the remote while trying to stand up.
On a tow it is even worse, with the other hand grabbing the handle.
My current idea is to have a separate device on the board, some kind of push button where I put my hands when I get up.
As long as that button is pushed, throttle stays locked to last value, until throttle has been at zero and is up again, that is the remote is reengaged.
Once the push button is released, it stays in locked mode for a few seconds to get up. To make this safe, it might be a good idea to integrate an IMU to detect tilt or roll deviation.
So you could get up to speed, push up on that button, while letting go of the remote and get up and reengage the remote before the lock fades.
That should be reasonably easy to integrate with current BRemote2 over BLE. Any 3$ ESP32 will probably do.
As Ludwig wrote, I’m currently implementing a very advanced FollowMe mode for BREmote V2.
I’ve spent a lot of time on this project over the last month. I had to pause the work recently, but I’ve now returned to the project, especially the security testing, which is critical.
Development accelerated last week, and I hope to have good news in the coming weeks for testers.
I also want to mention that I worked closely with Ludwig on most of the features to make sure everything follows the spirit and philosophy of BREmote.
Here are the key features:
BREmote V3 FollowMe
A GPS-based autonomous follow system
Lets a vehicle follow a rider in real time
Automatically adjusts steering and speed, with user-assisted control
Maintains a safe following distance with built-in safety and recovery zones
Supports different follow behaviors depending on the use case
Includes live telemetry and diagnostics for monitoring system status
Can be tested in simulation before real-world use
BREmote Logs Analyzer
Captures and synchronizes logs from the transmitter, receiver, and radio sniffer
Replays recorded sessions for offline analysis
Measures key performance metrics such as packet loss, delay, jitter, reconnection time, and throughput
Helps identify whether an issue comes from the radio link or from software behavior
Generates clear reports and charts for faster debugging
Programs the TX and RX over serial and BLE
Keeps programming profiles
Session history tracking
Propeller analysis (Ludwig has some really nice ideas about this!)
BREmote for Apple Watch
A real-time companion app that connects to BREmote telemetry (used & adapted @plankton BLE code) and displays the most important data directly on the wrist, including:
Just out of curiosity, what is your actual use case for “Follow me”? Long pumping sessions?
I kinda want it, just because it is possible.
But for me (use in smallish waves) follow me is the last I would want. If anything it would be “Go back where we started”. I always fear it will be picked up by a bigger set and washed ashore, while I am not watching.
Very extremely welcome features!
With capabilities like this, BREmote become the best remote controller for watercrafts!
I already have a BN-220 GPS installed on my tow boogie, so if you’re looking for beta testers I would definitely be interested in helping test the FollowMe features.
The Apple Watch companion app would also be a really great addition to the system.
This is all great news! Thank you so much for putting your time into this. Apart from an upgraded GPS module, are there any further hardware requirements, in particular ESC vs VESC?
When everything has been thoroughly tested and validated, Ludwig and I will share the hardware. Apart from the TX and RX GPS, there is nothing special.
Obviously, using a VESC will allow you to benefit from the full logging features with more data available.
There is no need to rush for now.
I will share more infos soon …
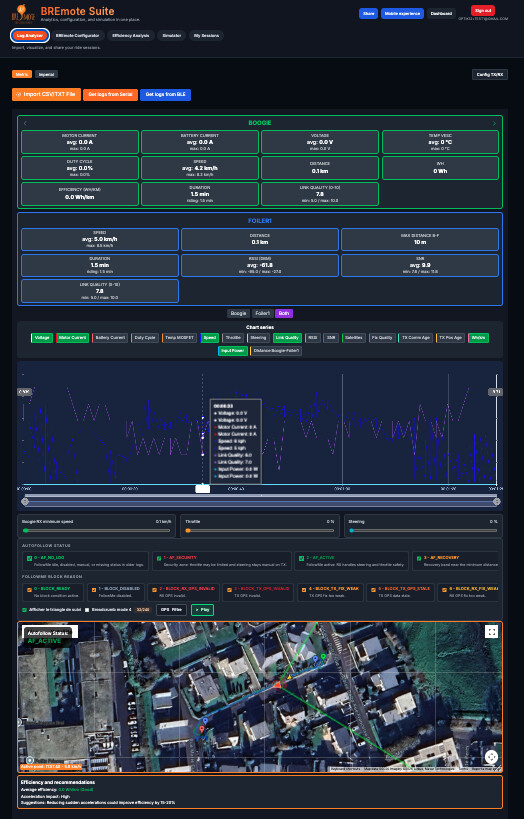
Here is an intermediary view of the logger view that help me test the safety of the system with an RC Car.
We are using the standard V2 RX and TX, except for the GPS modules, which are not fully validated yet.
I’m currently running RC car tests roughly every two days, and the project is now very close to the target.
The system is already operational and functional with RC car tests.
The results so far are very promising, and the remaining adjustments are mainly focused on stability, performance, and safety.
I’ll keep sharing regular updates to report on the progress.
Hi, I built my Bremote v2 Kit (and Rx) both with GPS. Rx with HGLRC M10 Pro (w compass) and M100 Mini on TX (just GPS M10 chip). But I get errors on Serial console when I “?printGPS” vaues on RX console. (I do have a GPS fix shown by M100 blinking light.
----- GPS Satellite Status -----
Satellites in view: 0
HDOP (Horizontal Dilution of Precision): Invalid
Location validity: Invalid
Date/Time validity: Invalid
Course validity: Invalid
Chars processed: 13840
Sentences with fix: 0
Failed checksum: 5
I checked cables and all are good and not inverter RX/TX to GPS…
Theres is no way to change the Baud rate in the online Config. I think the BN220 GPS uses 9600, while the M100 requires 115200. I use those M100 on drones and the GPS fix is faster. Any chance the configurator could add this option or a GPS chip (code) selector?
I was looking at the GPS.INo file
( BREmote-V2/Source/V2_Integration_Rx/GPS.ino at main · Luddi96/BREmote-V2 · GitHub
And it seems it is auto select the baud rate but it may be failing…
is there another software version I could try? Any help, thanks!!
Will be happy to report back. This is for my tow buggy with 1 prop and servo.
+++ Edit +++ Update.
I loaded JanRusher newer firmware on both and the RX while booting shows BAUD rate changed form 9600 to 115200. but still no good response from GPS. so same.
@ludwig_bre Thanks for your quick reply!
For the RX Receiver module, will it support compass via SDA and SCL? This will help my buggy aim better towards Remote. If so, will the BN-880 or the BN-880Q would work?
I agree. I followed a similar project using Ardupilot with a small tow buggy and it featured a PARK HERE or LOITER mode that kept the buggy in a fixed GPS position behind the waves. This PARK HERE location could be moved around to a 2nd or 3rd location by pressing a dedicated button on a small remote beacon remote (in the surfers arm).
While the BREmote V2 does not have more inputs; perhaps the AUX button on receiver could be wired to an external larger waterproof button on the buggy that when pressed, it registers the PARK HERE coordinates and would return the buggy to this location after towing me into a wave.
What do you think? This feature could add safety and avoid the buggy to go into rough waters.
How about: 0 throttle on the remote - hold position
Give throttle: Steer automatically towards the foiler (remote location)
No need for a separate button
I am very much against the idea of a boogie driving without the user actively holding the throttle, therefore stating “I am watching the path the boogie is taking and I am responsible it won’t collide with any other craft or person”
I like the philosophy of avoiding crashes while unsupervised, and agree with you.
Note that to maintain Hold Position/Park Here/Loiter Mode (however we call it) the tow buggy is actively moving (props and/or servo keel) and making corrections to stay in place, but one could limit speed to 8km/hr or so. This small position adjustments happen when unsupervised. (I also would like to use the tow buggy when Parawinging in the bay, and know it will stay in place while I go upwind, or to wait for my friend who has a 2nd BREmote and he is swimming back to the tow buggy to use himself. We alternate pronging and tow buggy… In this case it may lose signal to the 1st BREmote because it is too far away, but I want it to still Hold Position).
The reason I offered to AUX button on the RX is to actively be able to disable or enable the HOLD MODE . Which will change the Behavior of Steer/Throttle the TX and the RX response.
==Edit 1: If the RX=Buggy’s GPS has Compass, is can also register the direction of the Front of Buggy, which one can orient to facing the waves so the Position Hold is best met. ==
Another consideration is: One does not need HOLD POSITION when going out thru waves or beach brakes. I now lie over the rear part of my buggy (it is a 5’6" Sushi Foam board, so it’s quite comfortable to ride over it and cross the breaking waves). So, after crossing the waves one can engage the Hold position mode by pressing the AUX button.
PS: how could I change the behavior of the TX input in code for HOLD RIGHT AND TROTTLE when Powering on from USB to another mode?
Correct, hold position is also a violation of my philosophy.
At the moment, in firmware, all the ‘autonomous’ functions can only ever subtract from the throttle, never add to it. So without user input on throttle, the boogie will never be able to spin any motor on its own.
hello i saw the zero tow follow mode been use in line up with surfer every where and the boogie is following the surfer trajectory, so if the surfer can let people away from is trajectory amazingly the boogie stay away from any one, and it is safe. it is a little weird to see but it s functional.